You might also like
- Biological Data Analysis Using RDocument226 pagesBiological Data Analysis Using RAndré SantanaNo ratings yet
- An Introduction To RDocument212 pagesAn Introduction To ROscar Eduardo Acevedo AmayaNo ratings yet
- Mt15020-S-nx8 Adv Sim ProcessDocument422 pagesMt15020-S-nx8 Adv Sim ProcessCarlos BritosNo ratings yet
- Lam IntroductionToR LHLDocument212 pagesLam IntroductionToR LHLDr. ANUJ TEWARINo ratings yet
- Of BookDocument622 pagesOf BookgptitoNo ratings yet
- Ofbook-0 4 0Document492 pagesOfbook-0 4 0Kevan AtkinsNo ratings yet
- V Foreword VI Preface VII Authors' Profiles VIII Convention Ix Abbreviations X List of Tables Xi List of Figures Xii 1 1Document152 pagesV Foreword VI Preface VII Authors' Profiles VIII Convention Ix Abbreviations X List of Tables Xi List of Figures Xii 1 1July Rodriguez100% (3)
- Image Steganography and SteganalysisDocument127 pagesImage Steganography and SteganalysisPonnambli KamakshiNo ratings yet
- Re Center Psych StatsDocument560 pagesRe Center Psych StatsStella GašparušNo ratings yet
- R Book GuideDocument353 pagesR Book GuideSutriadi KurniawanNo ratings yet
- Rapidminer 6 Manual EnglishDocument118 pagesRapidminer 6 Manual EnglishtamiecristieNo ratings yet
- Java DSP PrinterDocument32 pagesJava DSP PrintervmacariNo ratings yet
- PSPP Users' Guide: GNU PSPP Statistical Analysis Software Release 0.8.2-Gf8ea4bDocument196 pagesPSPP Users' Guide: GNU PSPP Statistical Analysis Software Release 0.8.2-Gf8ea4bEvelyn MoranNo ratings yet
- Interactive and Dynamic Graphics For Data AnalysisDocument169 pagesInteractive and Dynamic Graphics For Data AnalysisedgardokingNo ratings yet
- Python enDocument187 pagesPython enBhavana Prakash100% (1)
- GeneSpring ManualDocument936 pagesGeneSpring ManualHelga WestersNo ratings yet
- PHDDocument198 pagesPHDnaussaNo ratings yet
- Gnu PSPP: A System For Statistical Analysis Edition 0.4.3, For PSPP Version 0.4.3Document175 pagesGnu PSPP: A System For Statistical Analysis Edition 0.4.3, For PSPP Version 0.4.3infobitsNo ratings yet
- JavaDocument258 pagesJavaSofia LourduNo ratings yet
- Discrete NotesDocument390 pagesDiscrete NotesnonotjenNo ratings yet
- APPLİED MATH. Sean MauchDocument2,321 pagesAPPLİED MATH. Sean MauchHüseyin YıldırımNo ratings yet
- Implementation and Study of K-Nearest NeDocument62 pagesImplementation and Study of K-Nearest Nemohamed chillaNo ratings yet
- Political Analysis Using R: James E. Monogan IIIDocument4 pagesPolitical Analysis Using R: James E. Monogan IIIlinda.modoloNo ratings yet
- R LangDocument67 pagesR LangcarlosedubarretoNo ratings yet
- Halcon 12.0 Solution Guide IDocument345 pagesHalcon 12.0 Solution Guide ICesar Morales FloresNo ratings yet
- R Language Definition: R Development Core TeamDocument67 pagesR Language Definition: R Development Core TeamAjay ShuklaNo ratings yet
- Designing With Informality A Case of inDocument88 pagesDesigning With Informality A Case of inSuraj Kumar DebbarmaNo ratings yet
- OOP Using JavaDocument221 pagesOOP Using JavaHarshad PatilNo ratings yet
- PSPP Users' Guide: GNU PSPP Statistical Analysis Software Release 1.4.1-G79ad47Document213 pagesPSPP Users' Guide: GNU PSPP Statistical Analysis Software Release 1.4.1-G79ad47Mayssa BougherraNo ratings yet
- Big Data and The WebDocument170 pagesBig Data and The WebcjmancorNo ratings yet
- Simulation Statistical Foundations and MethodologyFrom EverandSimulation Statistical Foundations and MethodologyNo ratings yet
- Template Matching Techniques in Computer Vision: Theory and PracticeFrom EverandTemplate Matching Techniques in Computer Vision: Theory and PracticeNo ratings yet
- A Mathematics Course for Political and Social ResearchFrom EverandA Mathematics Course for Political and Social ResearchRating: 5 out of 5 stars5/5 (1)
- Info-Gap Decision Theory: Decisions Under Severe UncertaintyFrom EverandInfo-Gap Decision Theory: Decisions Under Severe UncertaintyRating: 5 out of 5 stars5/5 (1)
- Introduction to Stochastic Search and Optimization: Estimation, Simulation, and ControlFrom EverandIntroduction to Stochastic Search and Optimization: Estimation, Simulation, and ControlRating: 4 out of 5 stars4/5 (2)
- Automatic Speech and Speaker Recognition: Large Margin and Kernel MethodsFrom EverandAutomatic Speech and Speaker Recognition: Large Margin and Kernel MethodsJoseph KeshetNo ratings yet
- Graphical Models: Representations for Learning, Reasoning and Data MiningFrom EverandGraphical Models: Representations for Learning, Reasoning and Data MiningNo ratings yet
- Developing Intelligent Agent Systems: A Practical GuideFrom EverandDeveloping Intelligent Agent Systems: A Practical GuideRating: 3 out of 5 stars3/5 (1)
- An Introduction to Nonlinear Boundary Value ProblemsFrom EverandAn Introduction to Nonlinear Boundary Value ProblemsNo ratings yet
- Quality and Performance Measurement in National Sport-Governing BodiesFrom EverandQuality and Performance Measurement in National Sport-Governing BodiesNo ratings yet
- Basic Research and Technologies for Two-Stage-to-Orbit Vehicles: Final Report of the Collaborative Research Centres 253, 255 and 259From EverandBasic Research and Technologies for Two-Stage-to-Orbit Vehicles: Final Report of the Collaborative Research Centres 253, 255 and 259No ratings yet
- Symbolic Data Analysis: Conceptual Statistics and Data MiningFrom EverandSymbolic Data Analysis: Conceptual Statistics and Data MiningNo ratings yet
- Applied Bayesian Modeling and Causal Inference from Incomplete-Data PerspectivesFrom EverandApplied Bayesian Modeling and Causal Inference from Incomplete-Data PerspectivesNo ratings yet
- Complete Audio Mastering: Practical TechniquesFrom EverandComplete Audio Mastering: Practical TechniquesRating: 5 out of 5 stars5/5 (5)
- Queueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science ApplicationsFrom EverandQueueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science ApplicationsRating: 5 out of 5 stars5/5 (1)
- Theory of Preliminary Test and Stein-Type Estimation with ApplicationsFrom EverandTheory of Preliminary Test and Stein-Type Estimation with ApplicationsNo ratings yet
- Practical Process Control for Engineers and TechniciansFrom EverandPractical Process Control for Engineers and TechniciansRating: 5 out of 5 stars5/5 (3)
- Lec 1 - Research Methology PDFDocument44 pagesLec 1 - Research Methology PDFFatiLilyNo ratings yet
- NTS Book For GAT GeneralDocument142 pagesNTS Book For GAT GeneralMuzaffar AhsanNo ratings yet
- Regestration FormDocument1 pageRegestration FormAnonymous XcSBqeNo ratings yet
- Whitepaper Usingbigdatatopredictprocessrisks PDFDocument8 pagesWhitepaper Usingbigdatatopredictprocessrisks PDFFatiLilyNo ratings yet
- NTS Book For GAT GeneralDocument142 pagesNTS Book For GAT GeneralMuzaffar AhsanNo ratings yet
- Space Shooter Upgrade Guide For Unity 5Document23 pagesSpace Shooter Upgrade Guide For Unity 5FatiLily100% (1)
- Lab Reports: MIPS Assembly LanguageDocument1 pageLab Reports: MIPS Assembly LanguageFatiLilyNo ratings yet
- Active Request 15dec2017Document19 pagesActive Request 15dec2017FatiLilyNo ratings yet
- A Comparison of Cloud Based Erp SystemsDocument116 pagesA Comparison of Cloud Based Erp SystemsEdo KrajinicNo ratings yet
- Electronic Circuits Lab ManualDocument192 pagesElectronic Circuits Lab ManualFatiLilyNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentFatiLilyNo ratings yet
- Implementation and Analysis of Intra-Domain Routing ProtocolDocument32 pagesImplementation and Analysis of Intra-Domain Routing ProtocolFatiLilyNo ratings yet
- (Nwsim) Winter 2012/2013 Introduction To Network Simulation 1Document25 pages(Nwsim) Winter 2012/2013 Introduction To Network Simulation 1FatiLilyNo ratings yet
- Shortest-Path Routing: Reading: Sections 4.2 and 4.3.4Document36 pagesShortest-Path Routing: Reading: Sections 4.2 and 4.3.4FatiLilyNo ratings yet
- TCP Protocol: Reliable Data Transfer & Connection ManagementDocument17 pagesTCP Protocol: Reliable Data Transfer & Connection ManagementFatiLily100% (1)
- Electronics Directory Articles/ Tutorials EbooksDocument3 pagesElectronics Directory Articles/ Tutorials EbooksFatiLilyNo ratings yet
- C Program / Source Code For The Distance Vector Routing Algorithm Using Bellman Ford's AlgorithmDocument4 pagesC Program / Source Code For The Distance Vector Routing Algorithm Using Bellman Ford's AlgorithmFatiLilyNo ratings yet
- Lab Reports: MIPS Assembly LanguageDocument1 pageLab Reports: MIPS Assembly LanguageFatiLilyNo ratings yet
- Matlab Image ProcessingDocument63 pagesMatlab Image ProcessingNikhil DeshmukhNo ratings yet
- Lab Reports: MIPS Assembly LanguageDocument1 pageLab Reports: MIPS Assembly LanguageFatiLilyNo ratings yet
- Assignment 4Document1 pageAssignment 4FatiLilyNo ratings yet
- New Text DocumentDocument6 pagesNew Text DocumentFatiLilyNo ratings yet
- Academic English 2012Document32 pagesAcademic English 2012FatiLilyNo ratings yet
- Lab Reports: MIPS Assembly LanguageDocument1 pageLab Reports: MIPS Assembly LanguageFatiLilyNo ratings yet
- Appendix ADocument8 pagesAppendix AFatiLilyNo ratings yet
- Answers To Review QuestionsDocument46 pagesAnswers To Review QuestionsKimverlie Abastar0% (1)
- Dbms Assignment #05: Engr. Sumayya SalahuddinDocument7 pagesDbms Assignment #05: Engr. Sumayya SalahuddinFatiLilyNo ratings yet
- Wireless ComDocument61 pagesWireless ComFatiLilyNo ratings yet
- What's The Deal?: Two-Operand AdditionDocument28 pagesWhat's The Deal?: Two-Operand AdditionFatiLilyNo ratings yet
- Network Routing: Basics and Foundations: Fatima Sadiq InternshipDocument31 pagesNetwork Routing: Basics and Foundations: Fatima Sadiq InternshipFatiLilyNo ratings yet
- G.R. No. 122039 May 31, 2000 VICENTE CALALAS, Petitioner, Court of Appeals, Eliza Jujeurche Sunga and Francisco Salva, RespondentsDocument56 pagesG.R. No. 122039 May 31, 2000 VICENTE CALALAS, Petitioner, Court of Appeals, Eliza Jujeurche Sunga and Francisco Salva, RespondentsJayson AbabaNo ratings yet
- FTC470XETDocument2 pagesFTC470XETDecebal ScorilloNo ratings yet
- BUS 301 Final AssesmentDocument15 pagesBUS 301 Final AssesmentTanzim ShahriarNo ratings yet
- GeM Bidding 2568310Document9 pagesGeM Bidding 2568310SICURO INDIANo ratings yet
- Brochure of H1 Series Compact InverterDocument10 pagesBrochure of H1 Series Compact InverterEnzo LizziNo ratings yet
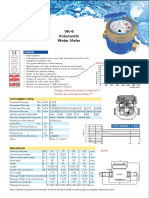
- Baylan: VK-6 Volumetric Water MeterDocument1 pageBaylan: VK-6 Volumetric Water MeterSanjeewa ChathurangaNo ratings yet
- UE Capability Information (UL-DCCH) - Part2Document51 pagesUE Capability Information (UL-DCCH) - Part2AhmedNo ratings yet
- 60 Years of Cannes Lions Infographics: The 50sDocument9 pages60 Years of Cannes Lions Infographics: The 50sSapientNitroNo ratings yet
- Zellner Bayesian AnalysisDocument4 pagesZellner Bayesian AnalysisfoopeeNo ratings yet
- Ermac vs. MedeloDocument1 pageErmac vs. MedeloJessa F. Austria-CalderonNo ratings yet
- AGE-WELL Annual Report 2021-2022Document31 pagesAGE-WELL Annual Report 2021-2022Alexandra DanielleNo ratings yet
- Flex VPNDocument3 pagesFlex VPNAnonymous nFOywQZNo ratings yet
- MTD Microwave Techniques and Devices TEXTDocument551 pagesMTD Microwave Techniques and Devices TEXTARAVINDNo ratings yet
- CASE FLOW AT REGIONAL ARBITRATIONDocument2 pagesCASE FLOW AT REGIONAL ARBITRATIONMichael Francis AyapanaNo ratings yet
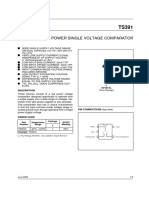
- Ts 391 IltDocument5 pagesTs 391 IltFunnypoumNo ratings yet
- Habawel V Court of Tax AppealsDocument1 pageHabawel V Court of Tax AppealsPerry RubioNo ratings yet
- Aggregate Demand and Supply: A ReviewDocument36 pagesAggregate Demand and Supply: A ReviewYovan DharmawanNo ratings yet
- Chapter 6 Performance Review and Appraisal - ReproDocument22 pagesChapter 6 Performance Review and Appraisal - ReproPrecious SanchezNo ratings yet
- A Survey of The Advancing Use and Development of Machine Learning in Smart ManufacturingDocument32 pagesA Survey of The Advancing Use and Development of Machine Learning in Smart Manufacturingbeben_19No ratings yet
- Chap1 7Document292 pagesChap1 7Zorez ShabkhezNo ratings yet
- GFRDDocument9 pagesGFRDLalit NagarNo ratings yet
- Keys and Couplings: Definitions and Useful InformationDocument10 pagesKeys and Couplings: Definitions and Useful InformationRobert Michael CorpusNo ratings yet
- Ibad Rehman CV NewDocument4 pagesIbad Rehman CV NewAnonymous ECcVsLNo ratings yet
- Appendix 9A: Standard Specifications For Electrical DesignDocument5 pagesAppendix 9A: Standard Specifications For Electrical Designzaheer ahamedNo ratings yet
- Readiness of Barangay Masalukot During TyphoonsDocument34 pagesReadiness of Barangay Masalukot During TyphoonsJerome AbrigoNo ratings yet
- FINAL Session 3 Specific GuidelinesDocument54 pagesFINAL Session 3 Specific GuidelinesBovelyn Autida-masingNo ratings yet
- Identifying Community Health ProblemsDocument4 pagesIdentifying Community Health ProblemsEmvie Loyd Pagunsan-ItableNo ratings yet
- Questions For ReviewDocument2 pagesQuestions For ReviewJoemar JavierNo ratings yet
- List of Registered Architects and Engineers As On 30-08-2010 PDFDocument10 pagesList of Registered Architects and Engineers As On 30-08-2010 PDFSaidhu MuhammedNo ratings yet
- Basic Concept of Process Validation in Solid Dosage Form (Tablet) : A ReviewDocument10 pagesBasic Concept of Process Validation in Solid Dosage Form (Tablet) : A Reviewqc jawaNo ratings yet