You might also like
- Outage Probability Analysis of Wireless Relay and Cooperative Networks in Rician Fading Channels With Different - FactorsDocument5 pagesOutage Probability Analysis of Wireless Relay and Cooperative Networks in Rician Fading Channels With Different - FactorsballmerNo ratings yet
- ECE 410 Digital Signal Processing D. Munson University of IllinoisDocument12 pagesECE 410 Digital Signal Processing D. Munson University of IllinoisFreddy PesantezNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Numerical Simulation of Cavity Flow Induced NoiseDocument6 pagesNumerical Simulation of Cavity Flow Induced Noise潘子豪No ratings yet
- Flight Test Instrumentation: Proceedings of the Third International Symposium 1964From EverandFlight Test Instrumentation: Proceedings of the Third International Symposium 1964M. A. PerryNo ratings yet
- Application of The SNGR Method To Predict Noise RadiationDocument9 pagesApplication of The SNGR Method To Predict Noise RadiationPeter DrageNo ratings yet
- Lighting Fittings Performance and Design: International Series of Monographs in Electrical EngineeringFrom EverandLighting Fittings Performance and Design: International Series of Monographs in Electrical EngineeringNo ratings yet
- Channel Models For MIMO: Adaptive Antenna Systems Persa Kyritsi December 16, 2004Document27 pagesChannel Models For MIMO: Adaptive Antenna Systems Persa Kyritsi December 16, 2004Jnj NguyenNo ratings yet
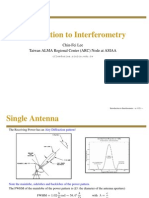
- Introduction To Interferometry - Lee - UnknownDocument21 pagesIntroduction To Interferometry - Lee - UnknownBrady WenNo ratings yet
- Performance Analysis of 6×6 Mimo Free Space Optical Links With MisalignmentDocument6 pagesPerformance Analysis of 6×6 Mimo Free Space Optical Links With MisalignmentseventhsensegroupNo ratings yet
- 3-D VSP Survey Design and ProcessingDocument24 pages3-D VSP Survey Design and ProcessingИнженер Луис А. ГарсиаNo ratings yet
- 838 FullDocument5 pages838 Fulltsar_philip2010No ratings yet
- Sensor Uncertainty Analysis of Mimoso NarDocument6 pagesSensor Uncertainty Analysis of Mimoso NarΤσιμπινός ΣπύροςNo ratings yet
- Estimation Broadband: of Angles of Arrivals ofDocument4 pagesEstimation Broadband: of Angles of Arrivals ofashaw002No ratings yet
- Implementation of An Acoustic Localization Algorithm For Video Camera SteeringDocument14 pagesImplementation of An Acoustic Localization Algorithm For Video Camera SteeringKumari RichaNo ratings yet
- Extensions of DAMAS and Benefits and Limitations of Deconvolution in BeamformingDocument13 pagesExtensions of DAMAS and Benefits and Limitations of Deconvolution in BeamformingHakan AKANNo ratings yet
- A 3D Ray Tracing ApproachDocument21 pagesA 3D Ray Tracing ApproachDebora Cores CarreraNo ratings yet
- Lab Manual For Bs PH 191Document7 pagesLab Manual For Bs PH 191SatyamNo ratings yet
- Performance Analysis of FIR Filter Design by Using Optimal, Blackman Window and Frequency Sampling MethodsDocument6 pagesPerformance Analysis of FIR Filter Design by Using Optimal, Blackman Window and Frequency Sampling Methodssimon alexNo ratings yet
- Radar LectureDocument35 pagesRadar Lecturec406400No ratings yet
- Complex Simulation Model of Mobile Fading Channel: Tomáš Marek, Vladimír Pšenák, Vladimír WieserDocument6 pagesComplex Simulation Model of Mobile Fading Channel: Tomáš Marek, Vladimír Pšenák, Vladimír Wiesergzb012No ratings yet
- Cooperative AF Relaying With Beamforming and Limited Feedback in Cognitive Radio NetworksDocument4 pagesCooperative AF Relaying With Beamforming and Limited Feedback in Cognitive Radio NetworksAhmed Al QayedNo ratings yet
- Navigation and Guidance: Dr. Shashi Ranjan KumarDocument35 pagesNavigation and Guidance: Dr. Shashi Ranjan KumarNinad KaleNo ratings yet
- Unit 2 Cooperative Diversity: Department of Communication Engineering, NCTUDocument30 pagesUnit 2 Cooperative Diversity: Department of Communication Engineering, NCTUballmerNo ratings yet
- First Order Complex Adaptive FIR Notch FilterDocument3 pagesFirst Order Complex Adaptive FIR Notch FilterAbelardo AlvarezNo ratings yet
- Aeroacoustics Modeling: Sandeep Sovani, PH.DDocument115 pagesAeroacoustics Modeling: Sandeep Sovani, PH.DPetre Cojan100% (1)
- International Journal of C Information and Systems Sciences Computing and InformationDocument10 pagesInternational Journal of C Information and Systems Sciences Computing and Informationss_18No ratings yet
- Riciain Channel Capacity Comparison Between (8X8) and (4x4) MIMODocument5 pagesRiciain Channel Capacity Comparison Between (8X8) and (4x4) MIMOseventhsensegroupNo ratings yet
- S-72.245 Transmission Methods in Telecommunication Systems (4 CR)Document22 pagesS-72.245 Transmission Methods in Telecommunication Systems (4 CR)Jnan RanjanNo ratings yet
- Adaptive Beam-Forming For Satellite Communication: by Prof. Binay K. Sarkar ISRO Chair ProfessorDocument50 pagesAdaptive Beam-Forming For Satellite Communication: by Prof. Binay K. Sarkar ISRO Chair ProfessorNisha Kumari100% (1)
- Isra PDFDocument2 pagesIsra PDFhorcajada-1No ratings yet
- EE 577: Wireless and Personal Communications: Lecture 10: Small Scale Fading and MultipathDocument18 pagesEE 577: Wireless and Personal Communications: Lecture 10: Small Scale Fading and MultipathmohamedNo ratings yet
- Week08 GpsDocument36 pagesWeek08 GpsAhmet CanatanNo ratings yet
- On The Mutual Orthogonality of Millimeter-Wave Massive MIMO ChannelsDocument5 pagesOn The Mutual Orthogonality of Millimeter-Wave Massive MIMO ChannelsFakhar AbbasNo ratings yet
- Implementation of Adaptive Processing in Integrated Active-Passive Sonars Deploying Cylindrical ArraysDocument6 pagesImplementation of Adaptive Processing in Integrated Active-Passive Sonars Deploying Cylindrical ArraysGabrielZamanNo ratings yet
- 6.0 Iir Filter Bee3213Document54 pages6.0 Iir Filter Bee3213Dora TengNo ratings yet
- MinorDocument4 pagesMinorPuneet ThakralNo ratings yet
- Advanced Multi-Pass InSAR Imaging For SurfaceDocument10 pagesAdvanced Multi-Pass InSAR Imaging For SurfaceSp LeeNo ratings yet
- Ix SB 04 Tabakov A PaperDocument8 pagesIx SB 04 Tabakov A Paperedgar chacinNo ratings yet
- Ca Array 9 16Document8 pagesCa Array 9 16Manjunath RamachandraNo ratings yet
- Park and Miller 2006Document12 pagesPark and Miller 2006Erick ReynaNo ratings yet
- Pecan: A Canadian Parabolic Equation Model For Underwater Sound PropagationDocument30 pagesPecan: A Canadian Parabolic Equation Model For Underwater Sound PropagationAneri JainNo ratings yet
- Chapter 2 Plane Surfaces and PrismsDocument22 pagesChapter 2 Plane Surfaces and PrismsEric Doctore KrageNo ratings yet
- Analysis of Channels Impulse Response Due To Transducer Movements in Underwater Acoustic CommunicationDocument8 pagesAnalysis of Channels Impulse Response Due To Transducer Movements in Underwater Acoustic CommunicationMaria MargaretaNo ratings yet
- Convention Paper: in Situ Determination of Acoustic Absorption CoefficientsDocument10 pagesConvention Paper: in Situ Determination of Acoustic Absorption CoefficientsJulian ForondaNo ratings yet
- Simulator of Dvor Navigation System: December 2015Document9 pagesSimulator of Dvor Navigation System: December 2015Linh KTNo ratings yet
- Theory and Use of Curved Surface Correction (CSC) Software in Olympus NDT EPOCH Series Flaw Detectors - Olympus IMSDocument10 pagesTheory and Use of Curved Surface Correction (CSC) Software in Olympus NDT EPOCH Series Flaw Detectors - Olympus IMSLuis HernándezNo ratings yet
- Unit5-Noise-Behaviour of Analog System in The Presence of NoiseDocument24 pagesUnit5-Noise-Behaviour of Analog System in The Presence of NoisePrashant DoundNo ratings yet
- Recall Snell's Laws: Reflected wave θ θ Angle of incidence Transmitted waveDocument4 pagesRecall Snell's Laws: Reflected wave θ θ Angle of incidence Transmitted wavesinghmaninderNo ratings yet
- A Decentralized Collaborative Receive Beamforming Technique For Wireless Sensor NetworksDocument5 pagesA Decentralized Collaborative Receive Beamforming Technique For Wireless Sensor Networkssathish14singhNo ratings yet
- Computing Impulse Response of Room Acoustics Using The Ray-Tracing Method in Time DomainDocument15 pagesComputing Impulse Response of Room Acoustics Using The Ray-Tracing Method in Time DomainFilipe MatematicaNo ratings yet
- 4.2.6. Design of Equiripple Linear-Phase FIR Digital FiltersDocument17 pages4.2.6. Design of Equiripple Linear-Phase FIR Digital FiltersBairam Ravi KumarNo ratings yet
- Particle Filter Based Nonlinear Data Detection For Frequency Selective Mm-Wave MIMO-OFDM SystemsDocument6 pagesParticle Filter Based Nonlinear Data Detection For Frequency Selective Mm-Wave MIMO-OFDM Systemspreety priyaNo ratings yet
- 3D FinalDocument82 pages3D Finalkhan_69No ratings yet
- CMP Crossceoraltion - 1Document15 pagesCMP Crossceoraltion - 1waqarNo ratings yet
- Signal Processing: Chris Potter, Ganesh K. Venayagamoorthy, Kurt KosbarDocument11 pagesSignal Processing: Chris Potter, Ganesh K. Venayagamoorthy, Kurt KosbarSonali DasNo ratings yet
- Performance Analysis of Different Inverse Filter Design TechniquesDocument7 pagesPerformance Analysis of Different Inverse Filter Design TechniquesEditor IJSETNo ratings yet
- Unit 1Document106 pagesUnit 1Musiur Raza AbidiNo ratings yet
- Practice Midterm1Document30 pagesPractice Midterm1thisguypoorNo ratings yet
- Emf 2 PDFDocument4 pagesEmf 2 PDFSUDARSHAN dAWNo ratings yet
- Lab 1 - Graph MatchingDocument3 pagesLab 1 - Graph Matchingkitsune-nildeNo ratings yet
- The Centenary of Einstein's First Scientific PaperDocument6 pagesThe Centenary of Einstein's First Scientific PaperMCarbajalNo ratings yet
- FractureMechanics Numericals SolvedDocument5 pagesFractureMechanics Numericals SolvedGopinath ChakrabortyNo ratings yet
- ESD Asociation Standard For Protection of Electrostatic Disharge ANSI-ESD S6.1-1999Document14 pagesESD Asociation Standard For Protection of Electrostatic Disharge ANSI-ESD S6.1-1999EmilianoNo ratings yet
- Shaft Calculation BaseDocument40 pagesShaft Calculation BaseObaciuIonel100% (1)
- Test of BitumenDocument2 pagesTest of BitumenAnonymous z1Yg7cDNyNo ratings yet
- Mri ArtifactsDocument59 pagesMri ArtifactsMarc Michael Dela CruzNo ratings yet
- Extra Problem Phys 4 CH 1Document48 pagesExtra Problem Phys 4 CH 1Kha MaNo ratings yet
- United States Patent (19) : SSNSN SnssnsDocument6 pagesUnited States Patent (19) : SSNSN SnssnsMihai RobertNo ratings yet
- Science 1206 Physics Worksheet 12 AccelerationDocument4 pagesScience 1206 Physics Worksheet 12 Accelerationawash0takuNo ratings yet
- Quantum Chemistry: Electronic Structure MethodsDocument8 pagesQuantum Chemistry: Electronic Structure MethodsNikhil Sharma RayaproluNo ratings yet
- Design of Foundation 6/8 MVA Power TransformerDocument2 pagesDesign of Foundation 6/8 MVA Power TransformerSujit Rasaily0% (2)
- Physics For Computer Science Students With Emphasis On Atomic and Semiconductor Physics - A. Damask e S. SchwarzDocument246 pagesPhysics For Computer Science Students With Emphasis On Atomic and Semiconductor Physics - A. Damask e S. SchwarzMichel AndradeNo ratings yet
- Forces On Large Steam Turbine Blades: RWE NpowerDocument5 pagesForces On Large Steam Turbine Blades: RWE NpoweradawNo ratings yet
- Solutions - AIATS Medical-2020 (XII Studying) - Test-5 - (Code-A & B) - 22-12-2019 PDFDocument30 pagesSolutions - AIATS Medical-2020 (XII Studying) - Test-5 - (Code-A & B) - 22-12-2019 PDFShashank KashyapNo ratings yet
- Quantum Magick Reconfiguring The Field, A Powerful Companion To Mind Magic Methods (The Mind Magic System Book 2) (Merlin Starlight) (Z-Library)Document225 pagesQuantum Magick Reconfiguring The Field, A Powerful Companion To Mind Magic Methods (The Mind Magic System Book 2) (Merlin Starlight) (Z-Library)Raynald Sumampouw100% (1)
- Engineering Structures: Gerard Taig, Gianluca RanziDocument21 pagesEngineering Structures: Gerard Taig, Gianluca Ranziمحمد عادل عبد المجيدNo ratings yet
- Design Iii: General Arrangement & Safety Plan: Department of Marine Engineering - ItsDocument15 pagesDesign Iii: General Arrangement & Safety Plan: Department of Marine Engineering - ItsBlackiedNo ratings yet
- Unsymmetrical Column Calculation ExampleDocument9 pagesUnsymmetrical Column Calculation Examplegsuriano7509No ratings yet
- Physics Fundamentals 1 Reviewer P1&2Document56 pagesPhysics Fundamentals 1 Reviewer P1&2roxy8marie8chan100% (2)
- RBI Lesson Plan Demo editED NEW For Science 8Document7 pagesRBI Lesson Plan Demo editED NEW For Science 8Chrisel Luat LopezNo ratings yet
- Robert Caldwell - Dark Energy CosmologyDocument21 pagesRobert Caldwell - Dark Energy CosmologyLopmazNo ratings yet
- Sci 09 Sample QPDocument8 pagesSci 09 Sample QPkvindhraNo ratings yet
- Soil Mechanics Gr. 3Document33 pagesSoil Mechanics Gr. 3Sid WorldNo ratings yet
- IEEE STD 563-1978 IEEE STD 664-1993: IEEE Guide On Conductor Self-Damping Measurements"Document12 pagesIEEE STD 563-1978 IEEE STD 664-1993: IEEE Guide On Conductor Self-Damping Measurements"fixer_007722No ratings yet
- D. Myers - Surfaces, Interfaces and Colloids - Principles and ApplicationsDocument520 pagesD. Myers - Surfaces, Interfaces and Colloids - Principles and ApplicationsAmairanyta Hernandez Zarate100% (4)
- Pile Settlement - EnCE 4610Document36 pagesPile Settlement - EnCE 4610undf25No ratings yet
- Esas ObjectivesDocument43 pagesEsas Objectivesbulatao allan50% (2)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectFrom EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectRating: 4.5 out of 5 stars4.5/5 (20)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (410)
- Strange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsFrom EverandStrange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsRating: 4 out of 5 stars4/5 (94)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- The Beginning of Infinity: Explanations That Transform the WorldFrom EverandThe Beginning of Infinity: Explanations That Transform the WorldRating: 5 out of 5 stars5/5 (60)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (49)
- Too Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldFrom EverandToo Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldRating: 4.5 out of 5 stars4.5/5 (8)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismFrom EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismRating: 4 out of 5 stars4/5 (500)
- The Reality Revolution: The Mind-Blowing Movement to Hack Your RealityFrom EverandThe Reality Revolution: The Mind-Blowing Movement to Hack Your RealityRating: 4.5 out of 5 stars4.5/5 (19)
- Infinite Powers: How Calculus Reveals the Secrets of the UniverseFrom EverandInfinite Powers: How Calculus Reveals the Secrets of the UniverseRating: 4.5 out of 5 stars4.5/5 (126)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- Mastering Logical Fallacies: The Definitive Guide to Flawless Rhetoric and Bulletproof LogicFrom EverandMastering Logical Fallacies: The Definitive Guide to Flawless Rhetoric and Bulletproof LogicRating: 4 out of 5 stars4/5 (91)
- Bedeviled: A Shadow History of Demons in ScienceFrom EverandBedeviled: A Shadow History of Demons in ScienceRating: 5 out of 5 stars5/5 (5)
- The Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceFrom EverandThe Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceRating: 4.5 out of 5 stars4.5/5 (23)
- Chernobyl 01:23:40: The Incredible True Story of the World's Worst Nuclear DisasterFrom EverandChernobyl 01:23:40: The Incredible True Story of the World's Worst Nuclear DisasterRating: 4 out of 5 stars4/5 (264)