You might also like
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Upec 2Document7 pagesUpec 2manjusingNo ratings yet
- ECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPDocument8 pagesECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPNunjaNo ratings yet
- AC CIRCUITS AND MACHINESDocument7 pagesAC CIRCUITS AND MACHINESpigilanteNo ratings yet
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andDocument9 pagesExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaNo ratings yet
- Performance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadDocument8 pagesPerformance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadInternational Journal of Research in Engineering and TechnologyNo ratings yet
- IM COMPARISONDocument4 pagesIM COMPARISONmenilanjan89nLNo ratings yet
- Bahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Document10 pagesBahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Wael M. AbulafiNo ratings yet
- DC Motors Speed Control - ModDocument9 pagesDC Motors Speed Control - ModAnuja VargheseNo ratings yet
- Engineering Lab 5 Machine Lab Lab 1 ReportDocument9 pagesEngineering Lab 5 Machine Lab Lab 1 Reportram010No ratings yet
- Three Phase Induction Motor ReportDocument24 pagesThree Phase Induction Motor ReportSiddharth NandhanNo ratings yet
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocument5 pagesSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNo ratings yet
- EEM483 Experiment1Document10 pagesEEM483 Experiment1Onat ŞenelNo ratings yet
- Traction Induction Drive For Railway CHUEV DenisDocument9 pagesTraction Induction Drive For Railway CHUEV DenisPABLO MAURONo ratings yet
- Practice ProblemsDocument4 pagesPractice Problemsdragon_warrior112456804No ratings yet
- EEE363 (Exp 10) Study of The Operating Characteristics and Torque Speed Relationship of Capacitor Start Motor & Run MotorDocument8 pagesEEE363 (Exp 10) Study of The Operating Characteristics and Torque Speed Relationship of Capacitor Start Motor & Run Motorsalad.ass420420No ratings yet
- Parameter Determination of The BLDC MotorDocument4 pagesParameter Determination of The BLDC MotorHuynh Thanh AnhNo ratings yet
- Induction Machine ReportDocument24 pagesInduction Machine ReportSiddharth NandhanNo ratings yet
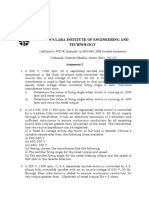
- Vignan's Lara Institute DC Motor AssignmentsDocument6 pagesVignan's Lara Institute DC Motor AssignmentsVenkat ManiNo ratings yet
- Simulation of Cycloconverter-Fed Split Phase Induction MotorDocument6 pagesSimulation of Cycloconverter-Fed Split Phase Induction MotorMohd SarfarazNo ratings yet
- Power Electronics and Electrical Drives Mid-Semester PaperDocument2 pagesPower Electronics and Electrical Drives Mid-Semester PaperU20EE051 DEEPTI BOSE SVNITNo ratings yet
- Rees DfigDocument50 pagesRees DfigSoham KaryakarteNo ratings yet
- No Load and Block Rotor Tests for 3-Phase Induction MotorDocument11 pagesNo Load and Block Rotor Tests for 3-Phase Induction MotorKsr Akhil100% (1)
- 293 Kumar PDFDocument6 pages293 Kumar PDFMaulana JayalaksanaNo ratings yet
- Tutorial EDDocument10 pagesTutorial EDPavan KhetrapalNo ratings yet
- Me 2209 Electrical Engineering Lab Manua EitlDocument45 pagesMe 2209 Electrical Engineering Lab Manua EitlRagunathan NarayananNo ratings yet
- DC Machines Test QuestionsDocument1 pageDC Machines Test QuestionsVeera ChaitanyaNo ratings yet
- Self-Excited Induction Generator With Regulated DC Voltage Scheme For Wind Power ApplicationsDocument7 pagesSelf-Excited Induction Generator With Regulated DC Voltage Scheme For Wind Power ApplicationsJitendraNo ratings yet
- Series MotorDocument11 pagesSeries MotorEiz Al.YemaniNo ratings yet
- Simulation of Three-PhaseDocument4 pagesSimulation of Three-PhasenanostallmannNo ratings yet
- Lab ProjectDocument4 pagesLab ProjectdevakisvaniNo ratings yet
- Speed sensorless vector control IM drive with NN rotor time constant IDDocument6 pagesSpeed sensorless vector control IM drive with NN rotor time constant IDJorge GuerreroNo ratings yet
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviNo ratings yet
- 142 No Load and Block Rotor Test 3 PH Ind Motor DolDocument15 pages142 No Load and Block Rotor Test 3 PH Ind Motor DolgettinNo ratings yet
- Total 363 Lab ManualDocument67 pagesTotal 363 Lab ManualBisal Sarker JoyNo ratings yet
- Indian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringDocument4 pagesIndian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringKool PrashantNo ratings yet
- Super 30 EM-1 - QBDocument3 pagesSuper 30 EM-1 - QBmr.kaustubh1362No ratings yet
- Electric Drive Parameters and Equilibrium Speed CalculationDocument7 pagesElectric Drive Parameters and Equilibrium Speed Calculationbigshark12345No ratings yet
- Current Limitation in The Neural Speed Control of A DC MotorDocument6 pagesCurrent Limitation in The Neural Speed Control of A DC MotorrameshhodeeeNo ratings yet
- EMDDocument7 pagesEMDDhruvam PandyaNo ratings yet
- Experiment No.6 The DC Shunt Motor RatingDocument7 pagesExperiment No.6 The DC Shunt Motor RatingMounta1n DewNo ratings yet
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- Synchronous Machine ProblemsDocument5 pagesSynchronous Machine Problemsbhuvana71No ratings yet
- Influence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationDocument5 pagesInfluence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationBOUZ2010No ratings yet
- EEE363 (Exp 2) Study of The Torque Speed Relationship of DC ShuntDocument6 pagesEEE363 (Exp 2) Study of The Torque Speed Relationship of DC Shuntsalad.ass420420No ratings yet
- Speed Control of DC MotorDocument48 pagesSpeed Control of DC MotorVivek VickyNo ratings yet
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocument11 pagesSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNo ratings yet
- AC Machines Course Outcomes and UnitsDocument4 pagesAC Machines Course Outcomes and Unitspramana_gmritNo ratings yet
- DC Shunt-Wound Motor Load Characteristics (40Document4 pagesDC Shunt-Wound Motor Load Characteristics (40zawirNo ratings yet
- 142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFDocument15 pages142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFGopinath B L NaiduNo ratings yet
- DC Motor Control Through Power DevicesDocument42 pagesDC Motor Control Through Power DevicesOnyango Okelo100% (1)
- Definition of A DC MotorDocument76 pagesDefinition of A DC MotorKiyoshi Jiro MalinaoNo ratings yet
- rr410202 Power Semi Conductor DrivesDocument8 pagesrr410202 Power Semi Conductor DrivesSrinivasa Rao GNo ratings yet
- DC FedDocument4 pagesDC FedPromit MandalNo ratings yet
- 4364 533 IdcDocument3 pages4364 533 Idcyogesh_b_kNo ratings yet
- Project AC MachinesDocument5 pagesProject AC MachinessurjanshkNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Basic Vocational Knowledge Electrical Installation PDFDocument150 pagesBasic Vocational Knowledge Electrical Installation PDFaimizaNo ratings yet
- MiniDocument3 pagesMiniyeabNo ratings yet
- Electrical Machines and DrivesDocument123 pagesElectrical Machines and Drivesanon-427532100% (14)
- Emsd Cop - e 2009Document338 pagesEmsd Cop - e 2009ew_rainNo ratings yet
- Ei Nvq2 Ch06Document32 pagesEi Nvq2 Ch06Nihar RoyNo ratings yet
- Researchpaper Sun Tracking System With Microcontroller 8051Document4 pagesResearchpaper Sun Tracking System With Microcontroller 8051KingAhmedChNo ratings yet
- Improve Power Factor and Reduce CostsDocument41 pagesImprove Power Factor and Reduce CostsyeabNo ratings yet
- Pel Whe MNSPDocument22 pagesPel Whe MNSPSundara Moorthy100% (1)
- A Science of Electric DriveDocument35 pagesA Science of Electric DriveEndex Whats EngelNo ratings yet
- PV SystemsDocument127 pagesPV SystemsTharinduDhanushkaUdagedaraNo ratings yet
- Ijshre 2305Document8 pagesIjshre 2305yeabNo ratings yet
- Automatic Street Light Control Using LDRDocument1 pageAutomatic Street Light Control Using LDRyeabNo ratings yet
- Solar Panel TrackerDocument44 pagesSolar Panel TrackerSathiskumar PerumalNo ratings yet
- P 1644 Automatic Street Light ControllerDocument39 pagesP 1644 Automatic Street Light ControllerharrisrajNo ratings yet
- Automatic Street Light Controller Using LDR AdvantagesDocument1 pageAutomatic Street Light Controller Using LDR AdvantagesyeabNo ratings yet
- Suruhanjaya Tenaga - Guidelines For Wiring ResidentialDocument55 pagesSuruhanjaya Tenaga - Guidelines For Wiring Residentialkingcloud7100% (24)
- SimpleDocument1 pageSimpleyeabNo ratings yet
- Untitled 2Document3 pagesUntitled 2yeabNo ratings yet
- How temperature affects transistor current and voltageDocument1 pageHow temperature affects transistor current and voltageyeabNo ratings yet
- Automatic Street Light Control Using LDRDocument1 pageAutomatic Street Light Control Using LDRyeabNo ratings yet
- Automatic Night Lamp With Morning AlarmDocument4 pagesAutomatic Night Lamp With Morning AlarmSai Manoj K R100% (1)
- Improve Power Factor and Reduce CostsDocument41 pagesImprove Power Factor and Reduce CostsyeabNo ratings yet
- Final Project ReportDocument18 pagesFinal Project ReportyeabNo ratings yet
- Chapter One: 1.1 Concepts of Power Factor CorrectionDocument37 pagesChapter One: 1.1 Concepts of Power Factor CorrectionyeabNo ratings yet
- Automatic Street Light Control System ID-121!33!846Document11 pagesAutomatic Street Light Control System ID-121!33!846yeabNo ratings yet
- Mica CapacitorsDocument3 pagesMica Capacitorsnick7simichNo ratings yet
- Types of Capacitors ExplainedDocument3 pagesTypes of Capacitors ExplainedrezhabloNo ratings yet
- Answer Test On Kinametics (Motion in One Dimension)Document4 pagesAnswer Test On Kinametics (Motion in One Dimension)hemachaturvedi560No ratings yet
- Cost and Benefit Analysis of Solar Panels at HomeDocument8 pagesCost and Benefit Analysis of Solar Panels at HomePoonam KilaniyaNo ratings yet
- Methods Predict Added Resistance WavesDocument66 pagesMethods Predict Added Resistance WavesmighalisNo ratings yet
- Beginners Guide To Going SolarDocument18 pagesBeginners Guide To Going SolarRogelio AlvaradoNo ratings yet
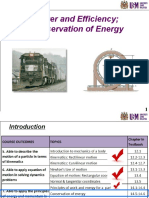
- Power and Efficiency; Conservation of EnergyDocument30 pagesPower and Efficiency; Conservation of EnergyHawstuff De HareishnathNo ratings yet
- Power System Protection Protection of Transformers: Mahzuba Islam (MI) Sr. Lecturer, EEEDocument10 pagesPower System Protection Protection of Transformers: Mahzuba Islam (MI) Sr. Lecturer, EEEAsrafonnasa Bithy 173-33-4293No ratings yet
- Waveform Amplifier: Accel InstrumentsDocument8 pagesWaveform Amplifier: Accel InstrumentsenticoNo ratings yet
- Hybrid Solar-Wind Charging Station For Electric Vehicles and Its SimulationDocument9 pagesHybrid Solar-Wind Charging Station For Electric Vehicles and Its SimulationIJRASETPublicationsNo ratings yet
- Fastness, Speed, Acceleration and Force Exam ResultsDocument19 pagesFastness, Speed, Acceleration and Force Exam Resultsyulia aryatiNo ratings yet
- Secondary Physics Temp NotesDocument3 pagesSecondary Physics Temp NotesHarish PrabhuNo ratings yet
- Av-04857 - Pump Selection GuideDocument8 pagesAv-04857 - Pump Selection GuideViệt Đặng XuânNo ratings yet
- Namma Kalvi 12th Physics Mr. Physics Notes All in One Notes 1m-3m-5m-10-m PDFDocument213 pagesNamma Kalvi 12th Physics Mr. Physics Notes All in One Notes 1m-3m-5m-10-m PDFRithik RajNo ratings yet
- Katalog PLN 150818Document48 pagesKatalog PLN 150818tuanudinNo ratings yet
- HVT Substation Equipment - Product List PDFDocument2 pagesHVT Substation Equipment - Product List PDFAmol DeshmukhNo ratings yet
- Chemistry EnthalpyDocument3 pagesChemistry EnthalpyAzariah GobinNo ratings yet
- Application Fields of High-Temperature SuperconductorsDocument14 pagesApplication Fields of High-Temperature SuperconductorsMohamed Kather BatchaNo ratings yet
- LW30-72.5 Outdoor HV SF6 Circuit Breaker Technical SpecificationsDocument15 pagesLW30-72.5 Outdoor HV SF6 Circuit Breaker Technical SpecificationsedgarcooNo ratings yet
- Unsteady Flow of A Viscous Fluid Over Plane Wall: Erdo An, MDocument8 pagesUnsteady Flow of A Viscous Fluid Over Plane Wall: Erdo An, MSrinivas JangiliNo ratings yet
- Strain Stress Sample ProblemsDocument2 pagesStrain Stress Sample ProblemsPaul CatayongNo ratings yet
- MRSM-Physics P2-Trial SPM 2009Document36 pagesMRSM-Physics P2-Trial SPM 2009kamalharmoza100% (3)
- Unit1 Vectors and Rectilinear MotionDocument8 pagesUnit1 Vectors and Rectilinear MotionDhanBahadurNo ratings yet
- 2020.04.14 Esah 3.1 PDFDocument130 pages2020.04.14 Esah 3.1 PDFShahril ShahibullahNo ratings yet
- LA47516 AMPpdfDocument7 pagesLA47516 AMPpdfMy TVBoxNo ratings yet
- Die CalculationsDocument13 pagesDie CalculationsDhinakaran R100% (1)
- Modelling of Liquid Hydrogen Boil-OffDocument16 pagesModelling of Liquid Hydrogen Boil-OffelmabroukiNo ratings yet
- RV Al - U-1000 AR2V Eng - Rev5 PDFDocument4 pagesRV Al - U-1000 AR2V Eng - Rev5 PDFjarias-solarpackNo ratings yet
- EN3: Introduction To Engineering and Statics: 3. Resultant of Systems of ForcesDocument6 pagesEN3: Introduction To Engineering and Statics: 3. Resultant of Systems of ForceskarthikaNo ratings yet