Strip Theory Of Ship Motions.
Heave &
Pitch
From WikiWaves
Jump to: navigation, search
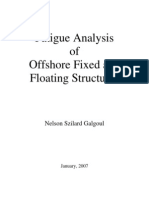
Ship motions with forward speed
Ship advances in the positive x-direction with constant speed
Regular waves with absolute frequency
the ship
The ship undergoes oscillatory motions in all six degrees of freedom
and direction
are incident upon
The ship seakeeping problem will be treated in the frequency domain under the
assumption of linearity.
Ship-hull boundary condition
The relevant rigid body velocities for a ship translating with a constant forward velocity
and heaving and pitching in head waves are:
Let
the time-dependent unit normal vector to the instantaneous position of the ship
hull. Let
be its value when the ship is at rest.
The body boundary condition will be derived for small heave & pitch motions
and will be stated on the mean position of the ship at rest.
The nonlinear boundary condition on the exact position of the ship hull is:
where,
The unsteady velocity potential has been written as the linear superposition of
the heave and pitch components. The total rigid-body velocity is the sum of
vertical velocity due to the ship heave and pitch.
The normal vector
where
is defined by
is the ship pitch rotation angle, and:
Keeping only the unsteady components:
Note that the steady component
statement of the steady flow. Let
has already been accounted for in the
where
and
are the unit-amplitude heave & pitch complex velocity potentials in
time-harmonic flow. Also:
It follows that:
Note the forward-speed effect in the pitch boundary condition and no such effect
in heave.
Ship-hull boundary conditions
where:
Diffraction problem:
Radiation problem:
We will consider the special but important case of heave & pitch which are coupled and
important modes to study in the ship seakeeping problem.
Heave and pitch are the only modes of interest in head waves (
)
when all other modes of motion (Roll-Sway-Yaw) are identically zero for a ship
symmetric port-starboard. Surge is nonzero but generally small for slender ships
and in ambient waves of small steepness.
Bernoulli equation
The linear hydrodynamic disturbance pressure due to unsteady flow disturbances is
given relative to the ship frame:
where
is the respective real potential.
Radiation problem
where the complex velocity potentials satisfy the 2D boundary value problems derived
earlier for slender ships.
The hydrodynamic pressure will be integrated over the ship hull to obtain the
added-mass and damping coefficients next:
The expressions derived below extend almost trivially to all other modes of motion. In
general,
So for heave:
And pitch:
Expressing
in terms of the heave & pitch added mass & damping coefficients when
the ship is forced to oscillate in calm water, we obtain when accounting for crosscoupling effects:
Hydrostatic restoring effects are understood to be added to
Introducing complex notation:
where the summation notation over
Introducing the definition of
some simple algebra:
And:
where from Bernoulli:
Strip theory
is understood hereafter.
in terms of the hydrodynamic pressure we obtain after
Strip theory is a popular approximation of the 3-D Neumann-Kelvin formulation
for ships which are slender as is most often the case when vessels are expected
to cruise at significant forward speeds.
The principal assumption is:
where
The principal assumption of strip theory is that certain components of the
radiation and diffraction potentials vary slowly along the ship length leading to a
simplification of the n-K formulation.
In head or bow waves where heave and pitch attain their maximum values, the
encounter frequency is usually high.
Radiation problem
The ship is forced to oscillate in heave & pitch in calm water while advancing at a speed
.
Due to slenderness the variation of the flow in the x-direction is more gradual
than its variation around a ship section. So
where
. Thus the 3D Laplace equation simplifies into a 2D form for the
heave & pitch potentials. (The same argument applies to Roll-Sway-Yaw). Thus
The 2D equation applies for each "strip" location at station-X.
The ship-hull condition at station-X for the heave & pitch potentials remains the
same:
where now:
Define the normalized potential
There remains to simplify the 3D n-K free-surface condition.
The solution of the 2D BVP for
along 30 - 40 stations used to describe the
hull form of most ships can be carried out very efficiently by standard 2D panel
method.
In terms of
The 2D heave added-mass and damping coefficients due to a section oscillation
vertically are defined by the familiar expressions
where
the heave & pitch potentials follow in the form:
is the encounter frequency.
The ship slenderness and the claim that is usually large in head or bow waves
is used to simplify the above equation as follows
by assuming that
. A formal proof is lengthy and technical.
It follows that the normalized potential
also satisfies the above 2D FS condition and
is thus the solution of the 2D boundary value problem stated below at station-X:
.
Upon integration along the ship length and over each cross section at station-X the 3D
added-mass and damping coefficients for heave & pitch take the form:
where the 2D added-mass and damping coefficients were defined above:
Diffraction problem
We will consider heave & pitch in oblique waves. Note that in oblique waves the
ship also undergoes Roll-Sway-Yaw motions which for a symmetric vessel and
according to linear theory are decoupled from heave and pitch.
Relative to the ship frame the total potential is:
where
is the encounter frequency, and:
Define the diffraction potential as follows:
In words, factor-out the oscillatory variation
out of the scattering potential.
The ship slenderness approximation now justifies that:
Note that this is not an accurate approximation for
when
quantity or when the ambient wavelength is small.
is a large
Substituting in the 3D laplace equation and ignoring the
obtain
This is the modified 2D Helmholtz equation in most cases the
term is
not important for reasons to be discussed and the 2D Laplace equation follows.
The body boundary condition simply states:
with:
Due to slenderness:
terms we
Invoking the slenderness approximations for the
boundary condition simplifies to:
derivatives of
, the body
with:
The potential
term, or
satisfies the 2D Laplace equation, after dropping the
And the free-surface condition derived next:
The 3D linear free surface condition for
The same condition is satisfied by
Verify identically for
is:
that:
So the forward-speed effect disappears from the free surface condition of
will be shown to be approximately true for the diffraction potential
. The same
Due to slenderness:
Therefore:
And from the free-surface condition
where:
So the free-surface condition for
becomes to leading order in slenderness:
So in the statement of the diffraction problem forward-speed effects are absent!
The same is not true in the radiation problem even for slender ship.
This "independence" of the diffraction problem on forward speed effects is
verified very well in experiments and in fully three-dimensional solutions.
In summary, the boundary-value problem satisfied by the diffraction potential around a
slender ship takes the form:
Or in graphical form at station-X:
As
Diffraction problem
The hydrodynamic pressure in the diffraction problem takes the form:
where
derivatives are dropped in favor of
, due to slenderness.
The heave and pitch exciting forces follow simply by pressure integration
where the approximation
was used.
In summary, a version of strip theory was derived for slenderships which has
been found to be the most rational and accurate relative to other alternatives.
This is particularly true for the treatment of the diffraction problem.
The coupled heave & pitch equation of motion take the familiar form
where in practice:
And the
counterparts
are functions of
&
defined above as integrals of their 2D
The heave & pitch exciting force amplitudes
hence not dependent on .
All hydrodynamic effects oscillate at
are functions of
Ocean Wave Interaction with Ships and Offshore Energy Systems
Retrieved from
"http://www.wikiwaves.org/index.php/Strip_Theory_Of_Ship_Motions._Heave_
%26_Pitch"
You might also like
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- 1370 StripTheory 03Document336 pages1370 StripTheory 03Huidong ZhangNo ratings yet
- Quick Strip Theory Calculations in Ship DesignDocument11 pagesQuick Strip Theory Calculations in Ship Designsalman GtrNo ratings yet
- SHIPMODocument2 pagesSHIPMOartimus_2kNo ratings yet
- Seakeeping ExercisesDocument26 pagesSeakeeping ExercisesRaniero FalzonNo ratings yet
- Seakeeping Calculations For ShipsDocument136 pagesSeakeeping Calculations For ShipsPriscila KIm100% (2)
- Catamaran Wetdeck Slamming Loads Using CFDDocument6 pagesCatamaran Wetdeck Slamming Loads Using CFDAhmadA.SwidanNo ratings yet
- Sea Keeping LectureDocument66 pagesSea Keeping Lecturevzagkas100% (2)
- Chapter 5 - Seakeeping ModelsDocument44 pagesChapter 5 - Seakeeping ModelsSahil Jawa100% (1)
- 0201 Intact Stability Essem 2 (Rev-01) PDFDocument92 pages0201 Intact Stability Essem 2 (Rev-01) PDFAnonymous i3lI9MNo ratings yet
- 1 - Ship Resistance ComponentsDocument26 pages1 - Ship Resistance ComponentshossamNo ratings yet
- Analytical Calculation of Uncoupled Heave and Roll, A Parametric Study of A Barge PDFDocument75 pagesAnalytical Calculation of Uncoupled Heave and Roll, A Parametric Study of A Barge PDFTor Edvard Søfteland90% (10)
- Resistance PDFDocument96 pagesResistance PDFPutra AdamNo ratings yet
- Theory of SeakeepingDocument59 pagesTheory of Seakeepingjack white100% (2)
- Sea Keeping Analysis For Preliminary DesignDocument10 pagesSea Keeping Analysis For Preliminary DesignTullio OpattiNo ratings yet
- ENGR 4011 Resistance & Propulsion of Ships Assignment 3: 2018Document5 pagesENGR 4011 Resistance & Propulsion of Ships Assignment 3: 2018Luis De GraciaNo ratings yet
- Slamming Experiments On A Ship Model: Rousset J.-M., Pettinotti B., Quillard O., Toularastel J.-L., Ferrant PDocument4 pagesSlamming Experiments On A Ship Model: Rousset J.-M., Pettinotti B., Quillard O., Toularastel J.-L., Ferrant PmroghaniNo ratings yet
- Shallow Water Resistance Charts For Preliminary Vessel DesignDocument18 pagesShallow Water Resistance Charts For Preliminary Vessel DesignshahjadaNo ratings yet
- Speedpowerofship 00 TayluoftDocument328 pagesSpeedpowerofship 00 TayluoftEko W PerkasaNo ratings yet
- RINA - Trim & Stability BookletDocument5 pagesRINA - Trim & Stability Bookletkevin kurnia marpaungNo ratings yet
- Prediction of Ship Roll Damping - State of The ArtDocument87 pagesPrediction of Ship Roll Damping - State of The ArtVasil YordanovNo ratings yet
- Inclining Experiment: ObjectiveDocument7 pagesInclining Experiment: ObjectiveAhmedYassinNo ratings yet
- Numerical Simulation of Ship Motion Due To Waves and ManoeuvringDocument48 pagesNumerical Simulation of Ship Motion Due To Waves and ManoeuvringHung NguyenNo ratings yet
- Hydrodynamic Support PresentationDocument108 pagesHydrodynamic Support PresentationAnonymous 95XksLBPZNo ratings yet
- Hydro Structure PapersDocument157 pagesHydro Structure PapersChen Chu-yunNo ratings yet
- Holtrop & Mennen - An Approximate Power Prediction MethodDocument6 pagesHoltrop & Mennen - An Approximate Power Prediction Methodjimmyy90100% (2)
- Seakeeping Part1Document58 pagesSeakeeping Part1Mayank GautamNo ratings yet
- Salvesen N.ship Motions and Sea.1970.TRANSDocument38 pagesSalvesen N.ship Motions and Sea.1970.TRANSigorgtgomez_2596335100% (3)
- Keuning - Further Investigation Into The Hydrodynamic Performance of The AXE Bow ConceptDocument15 pagesKeuning - Further Investigation Into The Hydrodynamic Performance of The AXE Bow ConcepteNo ratings yet
- Seaway Academy - Stability - Questions & Answers - Maritime TrainingDocument1 pageSeaway Academy - Stability - Questions & Answers - Maritime Trainingnikhil100% (1)
- (Mooring) : 1. GeneralDocument18 pages(Mooring) : 1. GeneralSushanta Kumar RoyNo ratings yet
- ENGR 4011 Resistance & Propulsion of Ships Assignment 1: 2017Document1 pageENGR 4011 Resistance & Propulsion of Ships Assignment 1: 2017Bagas Somporn Supriadi PutraNo ratings yet
- Bow ThrustersDocument15 pagesBow ThrustersJohn Angelo Tuliao100% (1)
- Intro To NADocument11 pagesIntro To NAAnshuman SharmaNo ratings yet
- Resistance Prediction of Fast CatamaranDocument8 pagesResistance Prediction of Fast CatamaranManoj KumarNo ratings yet
- Wave Restance For High-Speed CatamaransDocument30 pagesWave Restance For High-Speed CatamaransKay OosterwegelNo ratings yet
- Matlab TutorialDocument55 pagesMatlab TutorialSahil JawaNo ratings yet
- KS-0179-1 Procedures For Determination of Lightship Displace ENGDocument12 pagesKS-0179-1 Procedures For Determination of Lightship Displace ENGwaleedyehiaNo ratings yet
- Module 24 Damage StabilityDocument9 pagesModule 24 Damage StabilitySippu SifathullahNo ratings yet
- P1089-TM1010-132-X-A3 - FINAL INTACT STAB-Part 1 of 3 - APPR PDFDocument150 pagesP1089-TM1010-132-X-A3 - FINAL INTACT STAB-Part 1 of 3 - APPR PDFdarrylNo ratings yet
- Free Surface Effect: Dcad Rocloyd LigasonDocument28 pagesFree Surface Effect: Dcad Rocloyd LigasonZtik Peralta100% (3)
- Resistance HoltropDocument10 pagesResistance HoltropSujith Sukumar100% (1)
- Naval Architecture Examples and Theory PDFDocument8 pagesNaval Architecture Examples and Theory PDFtodrassNo ratings yet
- Quasi-Efficiency PropulsionDocument31 pagesQuasi-Efficiency PropulsionWafaà WafaNo ratings yet
- On High Speed Monohulls in Shallow Water: March 2010Document20 pagesOn High Speed Monohulls in Shallow Water: March 2010Stalin ZapataNo ratings yet
- The Technical University of Norway: Norwegian Ship Model Experiment TankDocument56 pagesThe Technical University of Norway: Norwegian Ship Model Experiment TankDeepak PooranachandranNo ratings yet
- Offshore HydrodynamicsDocument44 pagesOffshore HydrodynamicsKtk ZadNo ratings yet
- 401BG002R00 - Police 75M - General ArrangementDocument1 page401BG002R00 - Police 75M - General ArrangementTsani TsaniNo ratings yet
- Basic Naval Architecture Instructors Guide and Problem Set PDFDocument415 pagesBasic Naval Architecture Instructors Guide and Problem Set PDFnauval.arch100% (1)
- Ship Resistance and PropulsionDocument2 pagesShip Resistance and PropulsionMKS3006No ratings yet
- Volume IIDocument246 pagesVolume IIathanasios niotisNo ratings yet
- Wave Loads On Ships Sailing in Restricted Water DepthDocument17 pagesWave Loads On Ships Sailing in Restricted Water DepthAnwar ALkurayshiNo ratings yet
- The Drift Force and Moment On Ships in WavesDocument10 pagesThe Drift Force and Moment On Ships in WavesvictorNo ratings yet
- FM Immersed BodiesDocument40 pagesFM Immersed Bodiesjsrajoyd_224488661No ratings yet
- Eng. 6002 Ship Structures 1 Hull Girder Response Analysis: Lecture 3: Load, Shear Force, Bending MomentDocument21 pagesEng. 6002 Ship Structures 1 Hull Girder Response Analysis: Lecture 3: Load, Shear Force, Bending MomentDoğancan UzunNo ratings yet
- Added Virtual Mass of Ship LewisDocument27 pagesAdded Virtual Mass of Ship LewisMd. Shahjada TarafderNo ratings yet
- 6002 Notes 08 L2Document34 pages6002 Notes 08 L2talabizNo ratings yet
- Study of A Boat Hull ShapeDocument5 pagesStudy of A Boat Hull ShapeNobleMathewsNo ratings yet
- On The Subject of High Speed Monohulls PDocument44 pagesOn The Subject of High Speed Monohulls PFederico BabichNo ratings yet
- Probabilistic Fatigue Crack Growth AnalysisDocument11 pagesProbabilistic Fatigue Crack Growth AnalysisAnonymous swEs7SEgNo ratings yet
- Program Scores-Ship Structural Response in WavesDocument73 pagesProgram Scores-Ship Structural Response in WavesAnonymous swEs7SEgNo ratings yet
- FaquinhaDocument1 pageFaquinhaAnonymous swEs7SEgNo ratings yet
- Ctod For Growing CrackDocument1 pageCtod For Growing CrackAnonymous swEs7SEgNo ratings yet
- Quick Strip TheoryDocument11 pagesQuick Strip TheoryAnonymous swEs7SEgNo ratings yet
- Fatigue Analyses of Offshore StructuresDocument64 pagesFatigue Analyses of Offshore Structuresgeeawhiz55100% (4)
- Integral G KDocument1 pageIntegral G KAnonymous swEs7SEgNo ratings yet
- 2014 Final Exam: Open Book, Open Notes Due: 4 June 2014Document5 pages2014 Final Exam: Open Book, Open Notes Due: 4 June 2014Anonymous swEs7SEgNo ratings yet
- A.5.2.4 Inertia MatricesDocument12 pagesA.5.2.4 Inertia MatricesAnonymous swEs7SEgNo ratings yet
- Fillet Weld Size Calculation PDFDocument5 pagesFillet Weld Size Calculation PDFAnonymous swEs7SEgNo ratings yet
- Pdstrip Documentation PDFDocument45 pagesPdstrip Documentation PDFAnonymous swEs7SEgNo ratings yet
- Pdstrip Documentation PDFDocument45 pagesPdstrip Documentation PDFAnonymous swEs7SEgNo ratings yet
- Rationally-Based Fatigue Design of Tankers (Owen Hughes and Paul FranklinDocument17 pagesRationally-Based Fatigue Design of Tankers (Owen Hughes and Paul FranklinKelvin XuNo ratings yet
- Ipvp D 13 00192Document49 pagesIpvp D 13 00192Anonymous swEs7SEgNo ratings yet
- Hydromechanics ExercisesDocument22 pagesHydromechanics ExercisesPaolo BertolliNo ratings yet
- J-Q Characterization of Propagating Cracks.1023 - A-1007558400880Document13 pagesJ-Q Characterization of Propagating Cracks.1023 - A-1007558400880Anonymous swEs7SEgNo ratings yet
- Manual Wamit 6.2Document314 pagesManual Wamit 6.2rbmehlerNo ratings yet
- ch01 PDFDocument18 pagesch01 PDFSneijder27No ratings yet
- Handling End-Of-File - The READ Statement RevisitedDocument2 pagesHandling End-Of-File - The READ Statement RevisitedAnonymous swEs7SEgNo ratings yet
- PPTDocument61 pagesPPTAnonymous swEs7SEgNo ratings yet
- Bu ClinkDocument712 pagesBu ClinkAnonymous swEs7SEgNo ratings yet
- Fatigue Damage Evalution SSCCDocument324 pagesFatigue Damage Evalution SSCCAnonymous swEs7SEgNo ratings yet
- Manufacturing ProcessesDocument477 pagesManufacturing ProcessesVinod89% (19)
- Finite Element Modeling of Vibration of BeamsDocument22 pagesFinite Element Modeling of Vibration of BeamsAnonymous swEs7SEgNo ratings yet
- Hutchinson NonLinear FractureMechanicsDocument10 pagesHutchinson NonLinear FractureMechanicsAnonymous swEs7SEgNo ratings yet
- Envelope Critical Crack SizeDocument2 pagesEnvelope Critical Crack SizeAnonymous swEs7SEgNo ratings yet
- Fatigue Damage Evalution SSCCDocument324 pagesFatigue Damage Evalution SSCCAnonymous swEs7SEgNo ratings yet
- FRACTURE & FATIGUE - Advanced Fracture Mechanics - O'Dowd (Notes)Document107 pagesFRACTURE & FATIGUE - Advanced Fracture Mechanics - O'Dowd (Notes)manmathk100% (1)
- The Free Scalar FieldDocument12 pagesThe Free Scalar FieldRahul MehraNo ratings yet
- Automated Drilling MachineDocument14 pagesAutomated Drilling MachineVardhan ChipperNo ratings yet
- NEXUS SG 8C20 WerkstatthandbuchDocument36 pagesNEXUS SG 8C20 Werkstatthandbuchjacek_janikowsk43740% (1)
- ASTM A194-A 194M-05b, Carbon and Alloy Steel Nuts For Bolts For High Pressure or High TemperatureDocument13 pagesASTM A194-A 194M-05b, Carbon and Alloy Steel Nuts For Bolts For High Pressure or High TemperaturetariqkhanNo ratings yet
- 6 - IPR Curve Construction ExercisesDocument22 pages6 - IPR Curve Construction Exercisesمرتضى عبد الباري خنوبةNo ratings yet
- Gas TurbineDocument27 pagesGas Turbineghgh140100% (1)
- Cat D8T FiltersDocument2 pagesCat D8T Filtersjoseph katongoNo ratings yet
- 2016 FC-W Registered Four-Stroke-Cycle Marine OilsDocument2 pages2016 FC-W Registered Four-Stroke-Cycle Marine Oilschaca18No ratings yet
- STS QAC SOP 015 PSV ServicingDocument11 pagesSTS QAC SOP 015 PSV Servicingmohd as shahiddin jafri100% (1)
- Beeco ACV 16 v.4Document16 pagesBeeco ACV 16 v.4VeeramanikandanNo ratings yet
- Check Valves WaferDocument1 pageCheck Valves WaferwfjerrNo ratings yet
- Vibration Analysis Category I (Level 1)Document9 pagesVibration Analysis Category I (Level 1)Choochart ThongnarkNo ratings yet
- Volumetric Efficiency For Reciprocating CompressorDocument2 pagesVolumetric Efficiency For Reciprocating CompressorKrishna PATELNo ratings yet
- Impact Analysis of A Skull With and Without Helmet - SimScale PDFDocument6 pagesImpact Analysis of A Skull With and Without Helmet - SimScale PDFSooraj KrishnanNo ratings yet
- Report PDFDocument2 pagesReport PDFyuberNo ratings yet
- Irc 78 Draft LSM PDFDocument64 pagesIrc 78 Draft LSM PDFHimanshu Nimbalkar100% (2)
- The New P 410 LA 6x2 MNA With Opticruise: Scania Haulage TrucksDocument2 pagesThe New P 410 LA 6x2 MNA With Opticruise: Scania Haulage TrucksCristian ChiruNo ratings yet
- Pipe and Tool Joint Specification Data Table DPIDocument6 pagesPipe and Tool Joint Specification Data Table DPIkdc rig62No ratings yet
- Use of Basic Tools Tve 7 ModuleDocument13 pagesUse of Basic Tools Tve 7 ModuleJocelyn C. DinampoNo ratings yet
- JIS - Valve StandardsDocument10 pagesJIS - Valve StandardsPrateek GuptaNo ratings yet
- Plane Strain & Stress AssumptionsDocument8 pagesPlane Strain & Stress AssumptionsAbdul Aziz Abdul MajidNo ratings yet
- Ammonia Ref CycleDocument11 pagesAmmonia Ref CycleJom BonhayagNo ratings yet
- Winkler Curved Beam TheoryDocument21 pagesWinkler Curved Beam TheoryfddssaaNo ratings yet
- Shindaiwa 500man PDFDocument20 pagesShindaiwa 500man PDFesequiel fernandezNo ratings yet
- Wu-Performance of LS-DYNA Concrete Constitutive ModelsDocument14 pagesWu-Performance of LS-DYNA Concrete Constitutive ModelsaktcNo ratings yet
- Pipes b16.25 PDFDocument11 pagesPipes b16.25 PDFAsep DarojatNo ratings yet
- 1 s2.0 S2214785322018119 MainDocument5 pages1 s2.0 S2214785322018119 MainEstudiante2346No ratings yet
- Measurements of Thermal Contact M Rosochowska-2003Document7 pagesMeasurements of Thermal Contact M Rosochowska-2003ThirumalaimuthukumaranMohanNo ratings yet
- Blown Film ProblemsDocument33 pagesBlown Film Problemsjroyal69297467% (3)
- Lifan X60 Manual de ServicioDocument878 pagesLifan X60 Manual de ServicioYURI JAVIER SIERRA JIMENEZ80% (5)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (410)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- Giza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyFrom EverandGiza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyNo ratings yet
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeFrom EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNo ratings yet
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldFrom EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldRating: 4.5 out of 5 stars4.5/5 (54)
- Too Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldFrom EverandToo Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldRating: 4.5 out of 5 stars4.5/5 (8)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (49)
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectFrom EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectRating: 4.5 out of 5 stars4.5/5 (20)
- The Beginning of Infinity: Explanations That Transform the WorldFrom EverandThe Beginning of Infinity: Explanations That Transform the WorldRating: 5 out of 5 stars5/5 (60)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- The Holographic Universe: The Revolutionary Theory of RealityFrom EverandThe Holographic Universe: The Revolutionary Theory of RealityRating: 4.5 out of 5 stars4.5/5 (76)
- Strange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsFrom EverandStrange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsRating: 4 out of 5 stars4/5 (94)
- The Universe: The book of the BBC TV series presented by Professor Brian CoxFrom EverandThe Universe: The book of the BBC TV series presented by Professor Brian CoxRating: 5 out of 5 stars5/5 (27)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismFrom EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismRating: 4 out of 5 stars4/5 (500)
- Chasing Heisenberg: The Race for the Atom BombFrom EverandChasing Heisenberg: The Race for the Atom BombRating: 4.5 out of 5 stars4.5/5 (8)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)