You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- ThesisDocument75 pagesThesishodeegits9526No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Current Phase Lead Compensation in Single-Phase PFC Boost Converters With A Reduced Switching Frequency To Line Frequency RatioDocument7 pagesCurrent Phase Lead Compensation in Single-Phase PFC Boost Converters With A Reduced Switching Frequency To Line Frequency RatiochandooNo ratings yet
- A New Single-Phase Single-Stage Three-LevelDocument12 pagesA New Single-Phase Single-Stage Three-LevelGururaj BandaNo ratings yet
- Topic Assignment14Document6 pagesTopic Assignment14cuongakamarineNo ratings yet
- Index Terms-Active Power Filter (APF), One-Cycle Control, Power-Factor Correction (PFC)Document6 pagesIndex Terms-Active Power Filter (APF), One-Cycle Control, Power-Factor Correction (PFC)Shiva ShankarNo ratings yet
- A New Single-Phase Single-Stage Three-Level Power Factor Correction AC-DC ConverterDocument12 pagesA New Single-Phase Single-Stage Three-Level Power Factor Correction AC-DC Convertersurya_v988No ratings yet
- Ijet V2i2p17Document9 pagesIjet V2i2p17International Journal of Engineering and TechniquesNo ratings yet
- Active Front-End Converter For Medium-Voltage Current-Source Drives Using Sequential-Sampling Synchronous Space-Vector ModulationDocument15 pagesActive Front-End Converter For Medium-Voltage Current-Source Drives Using Sequential-Sampling Synchronous Space-Vector ModulationMaikPortnoyNo ratings yet
- A Modified Single-Phase Quasi-Z-Source Ac-Ac ConverterDocument7 pagesA Modified Single-Phase Quasi-Z-Source Ac-Ac ConverterMaruthi JacsNo ratings yet
- A Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM StrategyDocument2 pagesA Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM Strategyskumar_61719No ratings yet
- Design and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorDocument5 pagesDesign and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorSEP-PublisherNo ratings yet
- Inverter Distributed: Controller Generation SystemsDocument7 pagesInverter Distributed: Controller Generation SystemsJohnNo ratings yet
- Zero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellsDocument8 pagesZero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellssghfqweNo ratings yet
- A Three-Level Quasi-Two-Stage Three-Phase PFC ConverterDocument10 pagesA Three-Level Quasi-Two-Stage Three-Phase PFC ConverterjohnsonNo ratings yet
- VSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownDocument38 pagesVSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownleslyNo ratings yet
- P. F Correction Control of 3-Ф Induction Motor Drive through PWM Current Controlled TechniqueDocument6 pagesP. F Correction Control of 3-Ф Induction Motor Drive through PWM Current Controlled TechniqueDivya ShriNo ratings yet
- 00878876Document6 pages00878876jazzdeepakNo ratings yet
- Ijaret: International Journal of Advanced Research in Engineering and Technology (Ijaret)Document8 pagesIjaret: International Journal of Advanced Research in Engineering and Technology (Ijaret)IAEME PublicationNo ratings yet
- Chapter No.2 - Literature Review: ML4812 UC 2854Document3 pagesChapter No.2 - Literature Review: ML4812 UC 2854Pavan Kumar A GNo ratings yet
- Researchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsDocument6 pagesResearchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsAnonymous zmV3UaG0TNo ratings yet
- Voltage Balancing Control For A Three-Level Diode-Clamped Converter in A Medium-Voltage Transformerless Hybrid Active FilterDocument9 pagesVoltage Balancing Control For A Three-Level Diode-Clamped Converter in A Medium-Voltage Transformerless Hybrid Active FilterMiguel PanduroNo ratings yet
- A Unity Power Factor Converter Using HalfDocument14 pagesA Unity Power Factor Converter Using HalfLivia Faria PeresNo ratings yet
- Three-Port Rectifier-Based AC-DC Power Converters With Sigma Architecture and Reduced Conversion StagesDocument10 pagesThree-Port Rectifier-Based AC-DC Power Converters With Sigma Architecture and Reduced Conversion StagesifyNo ratings yet
- Analytical Model of The Half-Bridge Series Resonant Inverter For Improved Power Conversion Efficiency and PerformanceDocument4 pagesAnalytical Model of The Half-Bridge Series Resonant Inverter For Improved Power Conversion Efficiency and PerformanceMaruthi JacsNo ratings yet
- Vijay FPP ESD PT11Document65 pagesVijay FPP ESD PT11Swathi PrasadNo ratings yet
- A Low Cost Flyback CCM Inverter For AC Module ApplicationDocument9 pagesA Low Cost Flyback CCM Inverter For AC Module Applicationvinay kumarNo ratings yet
- Heavy Load Light Load Conversion ReportDocument41 pagesHeavy Load Light Load Conversion ReportSanjivee SachinNo ratings yet
- Power Factor Improvement With High Efficiency ConvertersDocument7 pagesPower Factor Improvement With High Efficiency ConvertersAnjali SharmaNo ratings yet
- Single Phase Single Stage Bidirectional Isolated Zvs Acdc With PFCDocument8 pagesSingle Phase Single Stage Bidirectional Isolated Zvs Acdc With PFCSamyak ParakhNo ratings yet
- Simulations and Experimental Verification of An All-Active Hybrid Converter Arrangement For Filtering Power System Harmonics andDocument6 pagesSimulations and Experimental Verification of An All-Active Hybrid Converter Arrangement For Filtering Power System Harmonics andshiks16No ratings yet
- Control Structures of Power Electronics For DPGSDocument23 pagesControl Structures of Power Electronics For DPGSAnna Maria BanicaNo ratings yet
- Figure 1. Traditional Interleaved Configuration Using A Flyback TopologyDocument7 pagesFigure 1. Traditional Interleaved Configuration Using A Flyback TopologyaldyNo ratings yet
- Quadratic Boost Converter For Photovoltaic Micro-Inverter: Ashirvad M and Rupesh K CDocument6 pagesQuadratic Boost Converter For Photovoltaic Micro-Inverter: Ashirvad M and Rupesh K CUmesh KumarNo ratings yet
- 48 Pulse PWMDocument6 pages48 Pulse PWMWilliam JavierNo ratings yet
- A Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueDocument56 pagesA Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueVineetKumarNo ratings yet
- PV Inverter - System Structure and Control Design: 4.1 PV Fed Three-Level Inverter For Utility InterfaceDocument38 pagesPV Inverter - System Structure and Control Design: 4.1 PV Fed Three-Level Inverter For Utility InterfaceAnggoro Indarto AkbarNo ratings yet
- A Single-Phase High Power Factor Rectifier, Based On A Two-Quadrant Shunt Active FilterDocument14 pagesA Single-Phase High Power Factor Rectifier, Based On A Two-Quadrant Shunt Active FilterNirmal Kumar PandeyNo ratings yet
- An Improved AC-DC Single-Stage Full-BridgeDocument12 pagesAn Improved AC-DC Single-Stage Full-BridgeAnonymous Z1RHn9ENo ratings yet
- v42 63Document5 pagesv42 63Bala KumarNo ratings yet
- Single-Switch High Step-Up Converters With Built-In Transformer Voltage Multiplier CellDocument11 pagesSingle-Switch High Step-Up Converters With Built-In Transformer Voltage Multiplier CellsathishNo ratings yet
- Super High Gain DC DC Converter EpiphanyDocument31 pagesSuper High Gain DC DC Converter EpiphanyForbeniusNo ratings yet
- Sepic ReportDocument55 pagesSepic ReportHEERAVATHINo ratings yet
- Input Impedance Analysis of Single-Phase PFC ConvertersDocument7 pagesInput Impedance Analysis of Single-Phase PFC ConvertersCem CanerenNo ratings yet
- Control of A Single-Stage Three-Phase Boost Power Factor Correction RectifierDocument6 pagesControl of A Single-Stage Three-Phase Boost Power Factor Correction RectifierGoriparthi SambasievaraavNo ratings yet
- Bi-Directional DC-to-DC Converter For Solar Applications With Battery BackupDocument5 pagesBi-Directional DC-to-DC Converter For Solar Applications With Battery BackupPaulius BruneikaNo ratings yet
- 31 2 Level, 48 PulseDocument6 pages31 2 Level, 48 PulseSumit MaheshwariNo ratings yet
- Buck PFCDocument37 pagesBuck PFCranjitheee1292No ratings yet
- Fixed Frequency Sliding Mode Modulator For Current Mode PWM InvertersDocument7 pagesFixed Frequency Sliding Mode Modulator For Current Mode PWM InvertersPaulo UchihaNo ratings yet
- Improvement of Power Factor and Harmonic Reduction With VSC For HVDC SystemDocument7 pagesImprovement of Power Factor and Harmonic Reduction With VSC For HVDC SystemGiwrgos GewrgiadisNo ratings yet
- An Integrated High-Power-Factor Converter With ZVS TransitionDocument10 pagesAn Integrated High-Power-Factor Converter With ZVS TransitionBook4AllNo ratings yet
- CombinandodutyratioyfrequenceDAB DC ACDocument11 pagesCombinandodutyratioyfrequenceDAB DC ACfiboNo ratings yet
- SEPIC AC-DC Converter For Aircraft Application: Bassim M.H. JassimDocument5 pagesSEPIC AC-DC Converter For Aircraft Application: Bassim M.H. JassimsabinebachNo ratings yet
- A Stabilizing, High-Performance Controller For Input Series-Output Parallel ConvertersDocument12 pagesA Stabilizing, High-Performance Controller For Input Series-Output Parallel ConvertersDipanjan DasNo ratings yet
- Ijiset V2 I12 03Document8 pagesIjiset V2 I12 03Likhitha YerraNo ratings yet
- Digital Simulation of The Generalized Unified Power Flow Controller System With 60-Pulse GTO-Based Voltage Source ConverterDocument9 pagesDigital Simulation of The Generalized Unified Power Flow Controller System With 60-Pulse GTO-Based Voltage Source ConverterVijay KrishnaNo ratings yet
- Dynamic Voltage Restorer Employing Multilevel Cascaded H-Bridge InverterDocument9 pagesDynamic Voltage Restorer Employing Multilevel Cascaded H-Bridge InverterSuresh KumarNo ratings yet
- Multipulse Converters and Controls For HVDC and FACTS SystemsDocument9 pagesMultipulse Converters and Controls For HVDC and FACTS SystemssanjusNo ratings yet
- Family Controller PFCDocument8 pagesFamily Controller PFCWesley de PaulaNo ratings yet
- ApplicationDocument4 pagesApplicationAnoop MathewNo ratings yet
- JournalDocument2 pagesJournalAnoop MathewNo ratings yet
- Application For Empanelment of Real Estate AgenciesDocument1 pageApplication For Empanelment of Real Estate AgenciesAnoop MathewNo ratings yet
- Artsenz Biz PlanDocument1 pageArtsenz Biz PlanAnoop MathewNo ratings yet
- Armature Reaction and CommutationDocument4 pagesArmature Reaction and CommutationAnoop MathewNo ratings yet
- Power Electronics Slides and Notes DC ConvertersDocument40 pagesPower Electronics Slides and Notes DC ConvertersAnoop MathewNo ratings yet
- 1) List of Important Details (Indian LLP)Document4 pages1) List of Important Details (Indian LLP)Anoop MathewNo ratings yet
- Gate Turn-Off Thyristors (GTOS) : Lecture NotesDocument7 pagesGate Turn-Off Thyristors (GTOS) : Lecture NoteschethanNo ratings yet
- Electric Utility Applications: - These Applications Are Growing RapidlyDocument18 pagesElectric Utility Applications: - These Applications Are Growing Rapidlyapi-3705260No ratings yet
- Power Electronics Ned Mohan Slides Ch29Document12 pagesPower Electronics Ned Mohan Slides Ch29Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch27Document24 pagesPower Electronics Ned Mohan Slides Ch27Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch28Document26 pagesPower Electronics Ned Mohan Slides Ch28Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch30Document48 pagesPower Electronics Ned Mohan Slides Ch30Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch25Document17 pagesPower Electronics Ned Mohan Slides Ch25Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch26Document44 pagesPower Electronics Ned Mohan Slides Ch26Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch22Document35 pagesPower Electronics Ned Mohan Slides Ch22Anoop MathewNo ratings yet
- Thyristors (SCRS) : Lecture NotesDocument14 pagesThyristors (SCRS) : Lecture NotesBeverly PamanNo ratings yet
- Power Electronics Ned Mohan Slides Ch19Document17 pagesPower Electronics Ned Mohan Slides Ch19Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch21Document27 pagesPower Electronics Ned Mohan Slides Ch21Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch1Document12 pagesPower Electronics Ned Mohan Slides Ch1Anoop MathewNo ratings yet
- Utility Interface: - Power Quality Has Become An Important IssueDocument20 pagesUtility Interface: - Power Quality Has Become An Important Issueapi-3705260No ratings yet
- CH 20Document27 pagesCH 20avi013No ratings yet
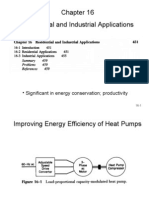
- Residential and Industrial Applications: - Significant in Energy Conservation ProductivityDocument11 pagesResidential and Industrial Applications: - Significant in Energy Conservation Productivityapi-3705260No ratings yet
- Power Electronics Ned Mohan Slides Ch26Document44 pagesPower Electronics Ned Mohan Slides Ch26Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch25Document17 pagesPower Electronics Ned Mohan Slides Ch25Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch29Document12 pagesPower Electronics Ned Mohan Slides Ch29Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch30Document48 pagesPower Electronics Ned Mohan Slides Ch30Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch28Document26 pagesPower Electronics Ned Mohan Slides Ch28Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch27Document24 pagesPower Electronics Ned Mohan Slides Ch27Anoop MathewNo ratings yet
- Gate Turn-Off Thyristors (GTOS) : Lecture NotesDocument7 pagesGate Turn-Off Thyristors (GTOS) : Lecture NoteschethanNo ratings yet
- Properties of Matter Notes Grade 8Document1 pageProperties of Matter Notes Grade 8Maristela Paraan MacaranasNo ratings yet
- Assignment I: Instructure: Fandi Oktasendra, M.SC General Physics - Jul-Dec 2018 September 5, 2018Document2 pagesAssignment I: Instructure: Fandi Oktasendra, M.SC General Physics - Jul-Dec 2018 September 5, 2018Issyariah SyukronNo ratings yet
- Universal-XR60CX: The All in One ControlDocument2 pagesUniversal-XR60CX: The All in One ControlMostafa ShannaNo ratings yet
- L Frame - Series Moulded Case Circuit Breakers: Features ApplicationsDocument6 pagesL Frame - Series Moulded Case Circuit Breakers: Features ApplicationsThamsanqa MpanzaNo ratings yet
- Thermodynamics QBDocument15 pagesThermodynamics QBrajasamygopalNo ratings yet
- ATV 71 Installation Manual - ENDocument42 pagesATV 71 Installation Manual - ENFawzi AlzubairyNo ratings yet
- Modeling and Anylysis of Power Line Communications for Application in Smart Grid - КондрашовDocument6 pagesModeling and Anylysis of Power Line Communications for Application in Smart Grid - КондрашовlarisszaNo ratings yet
- LAB 5A Single Phase Current Transformer PDFDocument6 pagesLAB 5A Single Phase Current Transformer PDFHumayun ArshadNo ratings yet
- HG Series VCB - INTERRUPTORESDEVACIODocument32 pagesHG Series VCB - INTERRUPTORESDEVACIOVICTOR RAÚL LEÓN MEDINANo ratings yet
- SWYD Interconnection Cable ScheduleDocument14 pagesSWYD Interconnection Cable Scheduleerkamlakar223450% (4)
- Book 03 AGK2 ElectricsDocument383 pagesBook 03 AGK2 ElectricsCosmin Alexandru GrosariuNo ratings yet
- LM MCCB BrohureDocument20 pagesLM MCCB BrohureMunavwar ProfessNo ratings yet
- Simulated Parameters of Subgigawatt Relativistic Bwos With Permanent Magnetic SystemsDocument7 pagesSimulated Parameters of Subgigawatt Relativistic Bwos With Permanent Magnetic SystemsnanimedichaNo ratings yet
- Basic Inverter (VFD) : Oleh: Bagus OlifiantoDocument10 pagesBasic Inverter (VFD) : Oleh: Bagus OlifiantoAlwi HasibuanNo ratings yet
- FrictionDocument2 pagesFrictionchardz10No ratings yet
- Compact Substation KioskDocument2 pagesCompact Substation Kiosk4usangeetNo ratings yet
- KoneCranes Manuals 2182Document45 pagesKoneCranes Manuals 2182PatrikNo ratings yet
- Fluid Mechanics: Bernoulli EquationDocument9 pagesFluid Mechanics: Bernoulli Equationعبدالحميد العرفيNo ratings yet
- CapacitorDocument38 pagesCapacitorPiyush Vidyarthi100% (3)
- Lab 02 - Volumetric Measuring and Making SolutionsDocument10 pagesLab 02 - Volumetric Measuring and Making SolutionsAbram TorontoNo ratings yet
- Green Brakes - TranslateDocument1 pageGreen Brakes - TranslateTri Laksono SugiartoNo ratings yet
- Circulation Motion: Short Answer and QuestionDocument5 pagesCirculation Motion: Short Answer and QuestionAsif Rasheed RajputNo ratings yet
- ST10Document16 pagesST10shaitoNo ratings yet
- Electrical Discharges in AirDocument3 pagesElectrical Discharges in AirVlatko TrifunovicNo ratings yet
- Definitions of Basic and Supplementary UnitDocument16 pagesDefinitions of Basic and Supplementary UnitAmanNo ratings yet
- MTS63 4Document1 pageMTS63 4Kevim Guillen RodriguezNo ratings yet
- SA2-Revision Worksheet - MensurationDocument2 pagesSA2-Revision Worksheet - MensurationAdi9No ratings yet
- Thermodynamics Lecture #01: Engr. Yasir Yasin Department of Mechanical EngineeringDocument19 pagesThermodynamics Lecture #01: Engr. Yasir Yasin Department of Mechanical EngineeringyasiryasinNo ratings yet
- InductorDocument28 pagesInductorDean Bryan BaylonNo ratings yet
- Catalogo General de Productos EPCOS 2013Document96 pagesCatalogo General de Productos EPCOS 2013aresmecanicoNo ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (81)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (58)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (122)
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureFrom EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureRating: 5 out of 5 stars5/5 (125)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- Pale Blue Dot: A Vision of the Human Future in SpaceFrom EverandPale Blue Dot: A Vision of the Human Future in SpaceRating: 4.5 out of 5 stars4.5/5 (588)
- A Place of My Own: The Architecture of DaydreamsFrom EverandA Place of My Own: The Architecture of DaydreamsRating: 4 out of 5 stars4/5 (242)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (54)
- Broken Money: Why Our Financial System is Failing Us and How We Can Make it BetterFrom EverandBroken Money: Why Our Financial System is Failing Us and How We Can Make it BetterRating: 5 out of 5 stars5/5 (3)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4 out of 5 stars4/5 (5)
- The Assassination Complex: Inside the Government's Secret Drone Warfare ProgramFrom EverandThe Assassination Complex: Inside the Government's Secret Drone Warfare ProgramRating: 4 out of 5 stars4/5 (55)
- The Book of the Moon: A Guide to Our Closest NeighborFrom EverandThe Book of the Moon: A Guide to Our Closest NeighborRating: 4.5 out of 5 stars4.5/5 (11)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansFrom EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNo ratings yet
- The Weather Machine: A Journey Inside the ForecastFrom EverandThe Weather Machine: A Journey Inside the ForecastRating: 3.5 out of 5 stars3.5/5 (31)
- The Knowledge: How to Rebuild Our World from ScratchFrom EverandThe Knowledge: How to Rebuild Our World from ScratchRating: 3.5 out of 5 stars3.5/5 (133)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreFrom EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreRating: 4.5 out of 5 stars4.5/5 (33)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)