You might also like
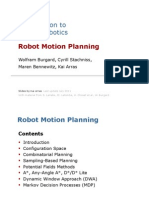
- Robot Motion PlanningDocument151 pagesRobot Motion Planningvarun_bluejayNo ratings yet
- Sudhanshu Kumar: ResumeDocument3 pagesSudhanshu Kumar: ResumePradeepNo ratings yet
- BillDocument6 pagesBillRoniel CedeñoNo ratings yet
- Electric VLSI Manual by DR Arnold PaglinawanDocument8 pagesElectric VLSI Manual by DR Arnold PaglinawanJJ AcotNo ratings yet
- Apprenticeship Learning Via Inverse Reinforcement LearningDocument8 pagesApprenticeship Learning Via Inverse Reinforcement LearningDuong NghiaNo ratings yet
- NIPS 1999 Policy Gradient Methods For Reinforcement Learning With Function Approximation PaperDocument7 pagesNIPS 1999 Policy Gradient Methods For Reinforcement Learning With Function Approximation PaperOrso ForghieriNo ratings yet
- Apprenticeship Learning About Multiple Intentions: Abbeel & NG 2004Document8 pagesApprenticeship Learning About Multiple Intentions: Abbeel & NG 2004banned minerNo ratings yet
- Active Learning For Reward Estimation in Inverse Reinforcement LearningDocument16 pagesActive Learning For Reward Estimation in Inverse Reinforcement LearningSaurabh AroraNo ratings yet
- Inverse Reinforcement Learning Through Policy Gradient MinimizationDocument7 pagesInverse Reinforcement Learning Through Policy Gradient MinimizationSakazuki AkainuNo ratings yet
- DisertatieDocument5 pagesDisertatieFilote CosminNo ratings yet
- A Brief Introduction To Reinforcement LearningDocument4 pagesA Brief Introduction To Reinforcement LearningNarendra PatelNo ratings yet
- Markov Decision Processes With Ordinal Rewards: Reference Point-Based PreferencesDocument8 pagesMarkov Decision Processes With Ordinal Rewards: Reference Point-Based PreferencesPaul WengNo ratings yet
- On Minimizing Ordered Weighted Regrets in Multiobjective Markov Decision ProcessesDocument15 pagesOn Minimizing Ordered Weighted Regrets in Multiobjective Markov Decision ProcessesPaul WengNo ratings yet
- NIPS 2004 Experts in A Markov Decision Process Paper CompressedDocument8 pagesNIPS 2004 Experts in A Markov Decision Process Paper CompressedTasya Syifa AltanzaniaNo ratings yet
- BT Rarbarllwcm 09Document8 pagesBT Rarbarllwcm 09crennydaneNo ratings yet
- RL QB Ise-1Document10 pagesRL QB Ise-1Lavkush yadavNo ratings yet
- NIPS 2016 Generative Adversarial Imitation Learning PaperDocument9 pagesNIPS 2016 Generative Adversarial Imitation Learning PaperIgnée FleurNo ratings yet
- Reinforcement Learning in A NutshellDocument12 pagesReinforcement Learning in A NutshellDope IndianNo ratings yet
- A Tutorial For Reinforcement LearningDocument17 pagesA Tutorial For Reinforcement LearningNirajDhotreNo ratings yet
- Behavior Based Learning in Identifying High Frequency Trading StrategiesDocument8 pagesBehavior Based Learning in Identifying High Frequency Trading StrategiesPeter PhamNo ratings yet
- DD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionDocument9 pagesDD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionbboyvnNo ratings yet
- Interactive Value Iteration For Markov Decision Processes With Unknown RewardsDocument7 pagesInteractive Value Iteration For Markov Decision Processes With Unknown RewardsPaul WengNo ratings yet
- (More) Efficient Reinforcement Learning Via Posterior SamplingDocument10 pages(More) Efficient Reinforcement Learning Via Posterior SamplinghbuddyNo ratings yet
- Papadimitriou Monte Carlo BiasDocument10 pagesPapadimitriou Monte Carlo BiasTom WestNo ratings yet
- 43 PDFDocument9 pages43 PDFarindamsinharayNo ratings yet
- Reinforcement LN-6Document13 pagesReinforcement LN-6M S PrasadNo ratings yet
- Genetic Reinforcement Learning Algorithms For On-Line Fuzzy Inference System Tuning "Application To Mobile Robotic"Document31 pagesGenetic Reinforcement Learning Algorithms For On-Line Fuzzy Inference System Tuning "Application To Mobile Robotic"Nelson AriasNo ratings yet
- LD ArticleDocument8 pagesLD ArticleFaheem ShaukatNo ratings yet
- 325 NotesDocument23 pages325 NotesShipra AgrawalNo ratings yet
- Hanna2021 Article GroundedActionTransformationFoDocument31 pagesHanna2021 Article GroundedActionTransformationFoAyman TaniraNo ratings yet
- Convex MTFLDocument39 pagesConvex MTFLReshma KhemchandaniNo ratings yet
- 8200 Non Delusional Q Learning and Value IterationDocument11 pages8200 Non Delusional Q Learning and Value IterationAmri YasirliNo ratings yet
- Relating Reinforcement Learning Performance To Classification PerformanceDocument8 pagesRelating Reinforcement Learning Performance To Classification PerformancePaul WengNo ratings yet
- cs237b Lecture 12Document14 pagescs237b Lecture 12movicNo ratings yet
- Reinforcement Learning and Control: CS229 Lecture NotesDocument15 pagesReinforcement Learning and Control: CS229 Lecture NotesIvan AvramovNo ratings yet
- RL Unit 5Document30 pagesRL Unit 5gilloshanonpNo ratings yet
- Generative Adversarial Imitation LearningDocument14 pagesGenerative Adversarial Imitation LearningMooNo ratings yet
- Issues in Using Function Approximation For Reinforcement LearningDocument9 pagesIssues in Using Function Approximation For Reinforcement Learninga.andreasNo ratings yet
- Adams2022 Article ASurveyOfInverseReinforcementLDocument40 pagesAdams2022 Article ASurveyOfInverseReinforcementLJNo ratings yet
- State-Augmentation Transformations For Risk-Sensitive Reinforcement LearningDocument8 pagesState-Augmentation Transformations For Risk-Sensitive Reinforcement LearningShambhav TewariNo ratings yet
- Hindsight Experience ReplayDocument15 pagesHindsight Experience ReplayShivamNo ratings yet
- Reinforcement Learning and Control Andrew NG Vid Lecture 16-17Document15 pagesReinforcement Learning and Control Andrew NG Vid Lecture 16-17Ehsan Elahi BashirNo ratings yet
- Origins of Life Questions and DebatesDocument12 pagesOrigins of Life Questions and DebatesPéter ErdeiNo ratings yet
- Files 1 2019 June NotesHubDocument 1559416363Document6 pagesFiles 1 2019 June NotesHubDocument 1559416363mail.sushilk8403No ratings yet
- MPRA Paper 19683Document15 pagesMPRA Paper 19683Sadhanakari DastagiribabuNo ratings yet
- Mlt-Cia Iii Ans KeyDocument14 pagesMlt-Cia Iii Ans KeyDarshu deepaNo ratings yet
- Exploration and Exploitation Tradeoff in Fuzzy Reinforcement LearningDocument6 pagesExploration and Exploitation Tradeoff in Fuzzy Reinforcement Learninghn317No ratings yet
- RL 1Document12 pagesRL 1Sushant VyasNo ratings yet
- Evolutionary Game Theory and Multi-Agent Reinforcement LearningDocument26 pagesEvolutionary Game Theory and Multi-Agent Reinforcement LearningSumit ChakravartyNo ratings yet
- Reinforcement Learning OptimizationDocument6 pagesReinforcement Learning OptimizationrhvzjprvNo ratings yet
- DPG原文Document9 pagesDPG原文杨烨峰No ratings yet
- Some Thoughts On Reinforcement Learning: 1 MotivationDocument9 pagesSome Thoughts On Reinforcement Learning: 1 Motivationfawkes2002No ratings yet
- RL Course ReportDocument10 pagesRL Course ReportshaneNo ratings yet
- Bellemare17a PDFDocument10 pagesBellemare17a PDFMohd Haroon AnsariNo ratings yet
- MATLAB Applications of Trading Rules and GARCH With Wavelets AnalysisDocument11 pagesMATLAB Applications of Trading Rules and GARCH With Wavelets Analysisgiovanis3202No ratings yet
- Approximate Planning in Large Pomdps Via Reusable TrajectoriesDocument7 pagesApproximate Planning in Large Pomdps Via Reusable TrajectoriesMahesh MuragNo ratings yet
- ML AlgorithmsDocument12 pagesML AlgorithmsShivendra ChandNo ratings yet
- DeepMind WhitepaperDocument9 pagesDeepMind WhitepapercrazylifefreakNo ratings yet
- Mahfoud & Mani 1996Document24 pagesMahfoud & Mani 1996Verónica Febre GuerraNo ratings yet
- The Effects of Memory Replay in Reinforcement LearningDocument14 pagesThe Effects of Memory Replay in Reinforcement Learningcnt dvsNo ratings yet
- Indistinguishability Operators Applied To Task Allocation Problem in Multi-Agent SystemsDocument10 pagesIndistinguishability Operators Applied To Task Allocation Problem in Multi-Agent SystemsCarlos Rueda ArmengotNo ratings yet
- Long MLDocument25 pagesLong MLdarvish9430801762No ratings yet
- Ceramic 7TS RestAllDocument1 pageCeramic 7TS RestAllvarun_bluejayNo ratings yet
- Form 15 HDocument3 pagesForm 15 Hvarun_bluejayNo ratings yet
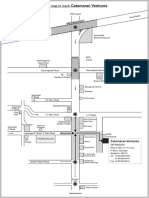
- Route - Map To CatamaranDocument1 pageRoute - Map To Catamaranvarun_bluejayNo ratings yet
- Planning-Based Prediction For PedestriansDocument6 pagesPlanning-Based Prediction For Pedestriansvarun_bluejayNo ratings yet
- Delaunay Triangulation NotesDocument3 pagesDelaunay Triangulation Notesvarun_bluejayNo ratings yet
- Flexi Combo PlansDocument1 pageFlexi Combo Plansvarun_bluejayNo ratings yet
- Queues - A Course in Queueing Theory, Moshe HavivDocument1 pageQueues - A Course in Queueing Theory, Moshe Havivvarun_bluejayNo ratings yet
- CyberMaster ManualDocument78 pagesCyberMaster ManualengineeringyusufNo ratings yet
- Senior Accountant Auditor MBA in Houston TX Resume Rochelle ButlerDocument3 pagesSenior Accountant Auditor MBA in Houston TX Resume Rochelle ButlerRochelleButlerNo ratings yet
- ChemDraw User GuideDocument346 pagesChemDraw User GuidejeroirlNo ratings yet
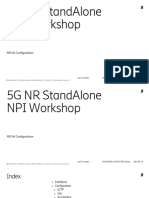
- 5G NR StandAlone NPI WorkshopDocument16 pages5G NR StandAlone NPI Workshop5gnew2025No ratings yet
- Online Voting System SRSDocument7 pagesOnline Voting System SRSSanthosh KumarNo ratings yet
- OSMSES 2023 Paper 03Document8 pagesOSMSES 2023 Paper 03Bogdan ZamfirNo ratings yet
- Automatically Build ML Models On Amazon SageMaker Autopilot - Tapan HoskeriDocument26 pagesAutomatically Build ML Models On Amazon SageMaker Autopilot - Tapan HoskeriShaurya ChandraNo ratings yet
- CS304P Assignment 2 Solution by M.junaid QaziDocument5 pagesCS304P Assignment 2 Solution by M.junaid QaziAtif MubasharNo ratings yet
- Algebraic Expressions Worksheet-1Document2 pagesAlgebraic Expressions Worksheet-1Orlando orlandooNo ratings yet
- Feature-Based Approaches To Semantic Similarity Assessment of Concepts Using WikipediaDocument18 pagesFeature-Based Approaches To Semantic Similarity Assessment of Concepts Using WikipediaLakshay BansalNo ratings yet
- Network Management Important Concepts (15CS833Document4 pagesNetwork Management Important Concepts (15CS833nirmal jainNo ratings yet
- Margin Measurements in Optical Amplifier Systems: S. Bergano, F. WDocument3 pagesMargin Measurements in Optical Amplifier Systems: S. Bergano, F. WMichałNo ratings yet
- Dl2003del040xxj0115 PDFDocument1 pageDl2003del040xxj0115 PDFAnuj PratapNo ratings yet
- Wang Guangbin Et Al - Exploring The High-Efficiency Clash Detection (... ) (2011, Paper)Document7 pagesWang Guangbin Et Al - Exploring The High-Efficiency Clash Detection (... ) (2011, Paper)Roger KriegerNo ratings yet
- Ait Unit 3Document10 pagesAit Unit 3Ayushi PatelNo ratings yet
- Ftse 100Document0 pagesFtse 100james22121No ratings yet
- Statistics PresentationDocument15 pagesStatistics PresentationMUHAMMAD UMAR100% (1)
- Nguyen Dinh Truong Giang: Work Experience EducationDocument1 pageNguyen Dinh Truong Giang: Work Experience EducationTôi LàNo ratings yet
- W568R Datasheet PDFDocument2 pagesW568R Datasheet PDFIrvin Yair Sabillón LópezNo ratings yet
- 10022Document262 pages10022Dan EsentherNo ratings yet
- Shift Handover Policy: 1. ScopeDocument3 pagesShift Handover Policy: 1. ScopeBoiler ScrubberNo ratings yet
- Threats, Vulnerabilities, and AttacksDocument9 pagesThreats, Vulnerabilities, and AttacksJohn Hector SaynoNo ratings yet
- Synctool LogDocument52 pagesSynctool LogAmmarNo ratings yet
- ESIC Paper III Sample Question Paper PDFDocument7 pagesESIC Paper III Sample Question Paper PDFsomprakash giriNo ratings yet
- Taleo 13B Latest FeaturesDocument135 pagesTaleo 13B Latest FeaturesamruthageethaNo ratings yet
- Sale Register Report PMGKAY June 2022 PHHDocument10 pagesSale Register Report PMGKAY June 2022 PHHsaumyaNo ratings yet
- 1-4081 - Print - 08!08!2017. VHP Main Bearing ThermocoupleDocument2 pages1-4081 - Print - 08!08!2017. VHP Main Bearing ThermocoupleShahzad AhmadNo ratings yet