You might also like
- MPU-6000 and MPU-6050 Product Specification Revision 3.1Document57 pagesMPU-6000 and MPU-6050 Product Specification Revision 3.1charleyNo ratings yet
- Using The MPU6050 IMUDocument30 pagesUsing The MPU6050 IMUjake2o040% (1)
- MPU-6050 Product Specification PDFDocument53 pagesMPU-6050 Product Specification PDFAchmad Rozi NurhudaNo ratings yet
- Mpu6050 SlidesDocument12 pagesMpu6050 SlidesNor Rochmad Hadi PNo ratings yet
- Biomedical Sensors Data Acquisition with LabVIEW: Effective Way to Integrate Arduino with LabViewFrom EverandBiomedical Sensors Data Acquisition with LabVIEW: Effective Way to Integrate Arduino with LabViewNo ratings yet
- Innovations in Telecommunications Part AFrom EverandInnovations in Telecommunications Part AJamal ManassahNo ratings yet
- IR Based Home Appliances ControlDocument6 pagesIR Based Home Appliances ControlClement RajNo ratings yet
- Smart Notice BoardDocument42 pagesSmart Notice BoardDhiraj BhattNo ratings yet
- 1.speed Synchronization of Multiple MotorsDocument89 pages1.speed Synchronization of Multiple MotorsBhanu TummalapalliNo ratings yet
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- MOSFET TransistorDocument17 pagesMOSFET TransistorOmer BallakNo ratings yet
- Zigbee Based Wireless Remote Weather Station Monitoring SystemDocument22 pagesZigbee Based Wireless Remote Weather Station Monitoring SystemSai Krishna Bangaru25% (4)
- Introduction To MPU6050Document2 pagesIntroduction To MPU6050Acrux KnightNo ratings yet
- Hand Gesture-Controlled Robotic Arm With All-Terrain Surveillance CarDocument7 pagesHand Gesture-Controlled Robotic Arm With All-Terrain Surveillance CarIJRASETPublicationsNo ratings yet
- Solar Powered Wifi Weather Station V2.0: InstructablesDocument31 pagesSolar Powered Wifi Weather Station V2.0: InstructablesCristian Ruiz S.No ratings yet
- Emerging Technologies in Information and Communications TechnologyFrom EverandEmerging Technologies in Information and Communications TechnologyNo ratings yet
- DC Power Monitor With INA209 and ArduinoDocument57 pagesDC Power Monitor With INA209 and Arduinojp2udhaya100% (2)
- High Efficiency RF and Microwave Solid State Power AmplifiersFrom EverandHigh Efficiency RF and Microwave Solid State Power AmplifiersRating: 1 out of 5 stars1/5 (1)
- IoT Protocols: Z-Wave and ThreadDocument5 pagesIoT Protocols: Z-Wave and ThreadAnonymous lPvvgiQjRNo ratings yet
- Application of IOT Devices For Smart Car Parking SystemDocument11 pagesApplication of IOT Devices For Smart Car Parking SystemabdelrahmanelfakiNo ratings yet
- Surveillance Robotic CarDocument10 pagesSurveillance Robotic CarSlakshmi NarayanaNo ratings yet
- (BSC Thesis) Intelligent LoRaDocument2 pages(BSC Thesis) Intelligent LoRaAlin ChiperNo ratings yet
- Smart Material Systems and MEMS: Design and Development MethodologiesFrom EverandSmart Material Systems and MEMS: Design and Development MethodologiesNo ratings yet
- Making Telecoms Work: From Technical Innovation to Commercial SuccessFrom EverandMaking Telecoms Work: From Technical Innovation to Commercial SuccessNo ratings yet
- Iain E. Richardson - H265 - HEVCDocument12 pagesIain E. Richardson - H265 - HEVCVivek SinhaNo ratings yet
- Lifi PDFDocument5 pagesLifi PDFHimanshu SaxenaNo ratings yet
- Arduino LCD ThermostatDocument6 pagesArduino LCD Thermostatmzovkic8No ratings yet
- Design and Implementation of Pulse Code Modulation Using Matlab SimulinkDocument4 pagesDesign and Implementation of Pulse Code Modulation Using Matlab SimulinkAprialdy StreetfootballNo ratings yet
- A Beginner's Guide to Data Agglomeration and Intelligent SensingFrom EverandA Beginner's Guide to Data Agglomeration and Intelligent SensingNo ratings yet
- Advanced Electronic Walking Stick For BlindDocument5 pagesAdvanced Electronic Walking Stick For BlindGRD JournalsNo ratings yet
- Arduino Audio OutputDocument13 pagesArduino Audio OutputdragonNo ratings yet
- 2C-ESP8266 SDK Programming-Guide en v1.0.1Document122 pages2C-ESP8266 SDK Programming-Guide en v1.0.1Sergio AndradeNo ratings yet
- Esp32 Wroom 32d - Esp32 Wroom 32u - Datasheet - enDocument28 pagesEsp32 Wroom 32d - Esp32 Wroom 32u - Datasheet - enFranco Rivadeneyra100% (1)
- Messenger Development Without Internet Using Zigbee TechnologyDocument89 pagesMessenger Development Without Internet Using Zigbee TechnologyRaghu ReddyNo ratings yet
- Quantum Well LasersFrom EverandQuantum Well LasersPeter S. Zory Jr.No ratings yet
- ESP32 DevKit ESP32-WROOM GPIO PinoutDocument7 pagesESP32 DevKit ESP32-WROOM GPIO PinoutOm VermaNo ratings yet
- 31Document9 pages31ALNATRON GROUPSNo ratings yet
- "Smart Irrigation System Using Internet of Things": Under The Guidance ofDocument32 pages"Smart Irrigation System Using Internet of Things": Under The Guidance ofANKIT KUMARNo ratings yet
- Wireless Data Transmission Between Two PIC Microcontrollers Using Low-Cost RF Modules - Embedded LabDocument12 pagesWireless Data Transmission Between Two PIC Microcontrollers Using Low-Cost RF Modules - Embedded Labmoonaliawan100% (3)
- Short Range Radar SystemDocument14 pagesShort Range Radar SystemKaththi Karthick100% (1)
- Remote Controlled Fan RegulatorDocument23 pagesRemote Controlled Fan RegulatorPradeep100% (5)
- A Complete 8-Bit Microcontroller in VHDLDocument29 pagesA Complete 8-Bit Microcontroller in VHDLSidney O. EbotNo ratings yet
- 21-06-2021-1624264403-6-.-2. Engg - Voltage Based Control of Induction Motor Using Advanced Voice Recognition & Command SystemDocument6 pages21-06-2021-1624264403-6-.-2. Engg - Voltage Based Control of Induction Motor Using Advanced Voice Recognition & Command SystemImpact JournalsNo ratings yet
- 2.ja - enDocument3 pages2.ja - enDragoșNo ratings yet
- 2.ja - enDocument3 pages2.ja - enDragoșNo ratings yet
- Affective Engagement To Virtual and Live Lectures: Conference PaperDocument11 pagesAffective Engagement To Virtual and Live Lectures: Conference PaperDragoșNo ratings yet
- Prevoius Month, Currnet MonthDocument3 pagesPrevoius Month, Currnet MonthDragoșNo ratings yet
- Orar Sem 1 Iesc Rev 8Document117 pagesOrar Sem 1 Iesc Rev 8DragoșNo ratings yet
- (Recovery) CWM Recovery 6.0.3Document4 pages(Recovery) CWM Recovery 6.0.3DragoșNo ratings yet
- Arduino - LearningDocument711 pagesArduino - LearningAwais TunioNo ratings yet
- Electric Motors For Electric VehiclesDocument15 pagesElectric Motors For Electric VehiclesFlavius Lungu100% (1)
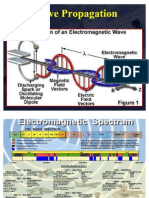
- Lesson 2 Wave PropagationDocument31 pagesLesson 2 Wave PropagationChuck LynchNo ratings yet
- Load CellDocument4 pagesLoad CelljakobNo ratings yet
- BCI184E - Technical Data SheetDocument8 pagesBCI184E - Technical Data SheetmkNo ratings yet
- SYNC - IEC60870-5-101 Master Interface User ManualDocument42 pagesSYNC - IEC60870-5-101 Master Interface User Manualarunss321No ratings yet
- White Paper - Mineral Oils, White Oils and Engineered Synthetic Dielectric Fluids 20180426.1aDocument14 pagesWhite Paper - Mineral Oils, White Oils and Engineered Synthetic Dielectric Fluids 20180426.1aDavid SundinNo ratings yet
- BRD8063 D PDFDocument24 pagesBRD8063 D PDFrammerDankovNo ratings yet
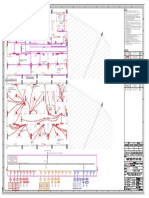
- Electrical Conduit and Fitting Layout:-Notes:-: STP17/OTH/333 STP17/OTH/230Document1 pageElectrical Conduit and Fitting Layout:-Notes:-: STP17/OTH/333 STP17/OTH/230Satya Vamsi DorapalliNo ratings yet
- Ot 150 - 240 - 700 Dim P5 inDocument5 pagesOt 150 - 240 - 700 Dim P5 inEzequiel FregaNo ratings yet
- From Silica To Silicon Wafer: The Silicon Single Crystal and Wafers ManufacturingDocument43 pagesFrom Silica To Silicon Wafer: The Silicon Single Crystal and Wafers ManufacturingmuyNo ratings yet
- Physics ProjectDocument16 pagesPhysics ProjectNAYAN DARYANINo ratings yet
- KUKA AppendixDocument43 pagesKUKA AppendixAlexandru Ionut Toma100% (1)
- 950F IiDocument20 pages950F Iidico65583% (6)
- Phase-Control IC - Tacho Applications: DescriptionDocument11 pagesPhase-Control IC - Tacho Applications: DescriptionAlex FierăscuNo ratings yet
- RADAR BRIDGE MASTER ''E'' Series Radar Ship's ManualDocument161 pagesRADAR BRIDGE MASTER ''E'' Series Radar Ship's Manualtoumassis_p100% (11)
- DLE3400W DLG3401W LG Builder Spec Sheet (20220107 - 120624)Document5 pagesDLE3400W DLG3401W LG Builder Spec Sheet (20220107 - 120624)cemkoc75No ratings yet
- WH627 Diagrama Elec.Document7 pagesWH627 Diagrama Elec.iker56777No ratings yet
- MS-MP01473 IT HandbookDocument30 pagesMS-MP01473 IT HandbookJayJayNo ratings yet
- Marathon Electric Generators 744RSL4054T60Document2 pagesMarathon Electric Generators 744RSL4054T60Carlos MartinezNo ratings yet
- Solar Photovoltaic System Design: Course IntroductionDocument7 pagesSolar Photovoltaic System Design: Course IntroductiongauravNo ratings yet
- 00-GSCW-MASTER INDEX-Version 4.0Document6 pages00-GSCW-MASTER INDEX-Version 4.0MOHAMMED RAZINo ratings yet
- DV 06 ActuationDocument6 pagesDV 06 ActuationAbhishek SaraswatNo ratings yet
- University of Engineering & Technology LahoreDocument10 pagesUniversity of Engineering & Technology Lahoreirfan aminNo ratings yet
- CISCO IconsDocument20 pagesCISCO IconsJesus MartinezNo ratings yet
- Mos Field Effect Transistor: Preliminary Data SheetDocument5 pagesMos Field Effect Transistor: Preliminary Data SheetEduRoiNo ratings yet
- A+ Review 1-10 - HardwareDocument71 pagesA+ Review 1-10 - Hardwaresaanire100% (1)
- User's Guide: Downloaded From Manuals Search EngineDocument372 pagesUser's Guide: Downloaded From Manuals Search EnginecesNo ratings yet
- Flying Drone. QuadrocopterDocument20 pagesFlying Drone. QuadrocopterAbhishek GangwarNo ratings yet
- DLD 7 StudentDocument6 pagesDLD 7 StudentAminul IslamNo ratings yet
- TPS A12 A12eDocument12 pagesTPS A12 A12eJoserecon BonillaNo ratings yet