You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Scalable, Tax Evasion-Free Anonymous InvestingDocument8 pagesScalable, Tax Evasion-Free Anonymous InvestingpostscriptNo ratings yet
- Solution To Mock Midterm 2: 1 Allais-Baumol-Tobin ModelDocument4 pagesSolution To Mock Midterm 2: 1 Allais-Baumol-Tobin ModelpostscriptNo ratings yet
- Is Lumpy Investment Relevant For The Business Cycle?Document31 pagesIs Lumpy Investment Relevant For The Business Cycle?postscriptNo ratings yet
- ?vfvcdtyvz - F - XV - Z - Uvcdtyczwev - Cvzyvuvdd73: Cva'Ce?'"%Document14 pages?vfvcdtyvz - F - XV - Z - Uvcdtyczwev - Cvzyvuvdd73: Cva'Ce?'"%postscriptNo ratings yet
- Approximating Prices of Bonds With Log - Normal Interest RateDocument17 pagesApproximating Prices of Bonds With Log - Normal Interest RatepostscriptNo ratings yet
- C M S 2004 International Press Vol. 2, No. 1, Pp. 137-144: Omm. Ath. CIDocument8 pagesC M S 2004 International Press Vol. 2, No. 1, Pp. 137-144: Omm. Ath. CIpostscriptNo ratings yet
- Encouraging Cooperative Solution of Mathematics ProblemsDocument9 pagesEncouraging Cooperative Solution of Mathematics ProblemspostscriptNo ratings yet
- Improving Dense Packings of Equal Disks in A Square: N N M M N NDocument9 pagesImproving Dense Packings of Equal Disks in A Square: N N M M N NpostscriptNo ratings yet
- CVDocument12 pagesCVpostscriptNo ratings yet
- NM Ad'S Statement of Disclosure: Mrose - Iesg@dbc - Mtview.ca - UsDocument13 pagesNM Ad'S Statement of Disclosure: Mrose - Iesg@dbc - Mtview.ca - UspostscriptNo ratings yet
- Gaining Confidence in Mathematics: Instructional Technology For GirlsDocument8 pagesGaining Confidence in Mathematics: Instructional Technology For GirlspostscriptNo ratings yet
- Efficient Computation of Optimal Trading StrategiesDocument44 pagesEfficient Computation of Optimal Trading StrategiespostscriptNo ratings yet
- Accessibility of Computer Science: A Re Ection For Faculty MembersDocument30 pagesAccessibility of Computer Science: A Re Ection For Faculty MemberspostscriptNo ratings yet
- Optimal Designation of Hedging Relationships Under FASB Statement 133Document13 pagesOptimal Designation of Hedging Relationships Under FASB Statement 133postscriptNo ratings yet
- Corporate Hedging: What, Why and How?Document48 pagesCorporate Hedging: What, Why and How?postscriptNo ratings yet
- Chap 9Document5 pagesChap 9postscriptNo ratings yet
- Studies in Nonlinear Dynamics and Econometrics: Quarterly Journal Volume 4, Number 4 The MIT PressDocument6 pagesStudies in Nonlinear Dynamics and Econometrics: Quarterly Journal Volume 4, Number 4 The MIT PresspostscriptNo ratings yet
- Semantic (Web) Technology in Action: Ontology Driven Information Systems For Search, Integration and AnalysisDocument9 pagesSemantic (Web) Technology in Action: Ontology Driven Information Systems For Search, Integration and AnalysispostscriptNo ratings yet
- Do Risk Premia Protect From Banking Crises?: Hans Gersbach Jan WenzelburgerDocument32 pagesDo Risk Premia Protect From Banking Crises?: Hans Gersbach Jan WenzelburgerpostscriptNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
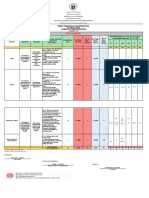
- Revised Final Quarter 1 Tos-Rbt-Sy-2022-2023 Tle-Cookery 10Document6 pagesRevised Final Quarter 1 Tos-Rbt-Sy-2022-2023 Tle-Cookery 10May Ann GuintoNo ratings yet
- IBPS Clerk Pre QUANT Memory Based 2019 QuestionsDocument8 pagesIBPS Clerk Pre QUANT Memory Based 2019 Questionsk vinayNo ratings yet
- Lec. 2Document22 pagesLec. 2محمدNo ratings yet
- Fire Technical Examples DIFT No 30Document27 pagesFire Technical Examples DIFT No 30Daniela HanekováNo ratings yet
- Hydrogeological Survey and Eia Tor - Karuri BoreholeDocument3 pagesHydrogeological Survey and Eia Tor - Karuri BoreholeMutonga Kitheko100% (1)
- A Junk Project - An Income Generating ProjectDocument2 pagesA Junk Project - An Income Generating ProjectHercules Verdeflor ValenzuelaNo ratings yet
- Mule 4 Error Handling DemystifiedDocument8 pagesMule 4 Error Handling DemystifiedNicolas boulangerNo ratings yet
- Suspend and Resume Calls: Exit PlugDocument4 pagesSuspend and Resume Calls: Exit PlugrajuNo ratings yet
- Morse Potential CurveDocument9 pagesMorse Potential Curvejagabandhu_patraNo ratings yet
- Ac1025 Exc16 (1) .PDFTTTTTTTTTTTTTTTTTTTDocument50 pagesAc1025 Exc16 (1) .PDFTTTTTTTTTTTTTTTTTTTHung Faat ChengNo ratings yet
- Terminal Blocks: Assembled Terminal Block and SeriesDocument2 pagesTerminal Blocks: Assembled Terminal Block and SeriesQuan Nguyen TheNo ratings yet
- Broiler ProductionDocument13 pagesBroiler ProductionAlexa Khrystal Eve Gorgod100% (1)
- Business CombinationsDocument18 pagesBusiness Combinationszubair afzalNo ratings yet
- ThaneDocument2 pagesThaneAkansha KhaitanNo ratings yet
- Britannia Volume 12 Issue 1981 (Doi 10.2307/526240) Michael P. Speidel - Princeps As A Title For 'Ad Hoc' CommandersDocument8 pagesBritannia Volume 12 Issue 1981 (Doi 10.2307/526240) Michael P. Speidel - Princeps As A Title For 'Ad Hoc' CommandersSteftyraNo ratings yet
- Activity Evaluation Form: "Where Children Come First"Document1 pageActivity Evaluation Form: "Where Children Come First"TuTitNo ratings yet
- Ebops PDFDocument2 pagesEbops PDFtuan nguyen duyNo ratings yet
- Cad Data Exchange StandardsDocument16 pagesCad Data Exchange StandardskannanvikneshNo ratings yet
- Freshers Jobs 26 Aug 2022Document15 pagesFreshers Jobs 26 Aug 2022Manoj DhageNo ratings yet
- Revit 2023 Architecture FudamentalDocument52 pagesRevit 2023 Architecture FudamentalTrung Kiên TrầnNo ratings yet
- Manual: Functional SafetyDocument24 pagesManual: Functional SafetymhaioocNo ratings yet
- BRAND AWARENESS Proposal DocumentDocument11 pagesBRAND AWARENESS Proposal DocumentBuchi MadukaNo ratings yet
- Lego Maps ArtDocument160 pagesLego Maps ArtВячеслав КозаченкоNo ratings yet
- Ed Post Lab Heat of Formation of NaClDocument4 pagesEd Post Lab Heat of Formation of NaClEdimar ManlangitNo ratings yet
- Bag Technique and Benedict ToolDocument2 pagesBag Technique and Benedict ToolAriel Delos Reyes100% (1)
- M.Plan SYLLABUS 2022-24Document54 pagesM.Plan SYLLABUS 2022-24Mili DawsonNo ratings yet
- Hindi ShivpuranDocument40 pagesHindi ShivpuranAbrar MojeebNo ratings yet
- LRAD Datasheet 2000XDocument2 pagesLRAD Datasheet 2000XOkkar MaungNo ratings yet
- N2 V Operare ManualDocument370 pagesN2 V Operare Manualramiro0001No ratings yet
- Introduction To M365 PresentationDocument50 pagesIntroduction To M365 Presentationlasidoh0% (1)