You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Toyota 5L Terminales de EcmDocument9 pagesToyota 5L Terminales de EcmAlfred Nayb Cañoli Ildefonso0% (1)
- 6 Slickline OperationsDocument302 pages6 Slickline OperationsAntonio Bevilacqua100% (4)
- XPath PresentationDocument14 pagesXPath PresentationJantrik ShopnoNo ratings yet
- Ricardo R4105ZD-61kW Genset Spec SheetDocument2 pagesRicardo R4105ZD-61kW Genset Spec SheetRonald Booc100% (3)
- Ion Between UL489 and ANSI C37 Standards - 0613DB9902Document4 pagesIon Between UL489 and ANSI C37 Standards - 0613DB9902dhayalasundaram5689No ratings yet
- Simulation of 6 Pulse Bridge Converter With Input Filter PDFDocument7 pagesSimulation of 6 Pulse Bridge Converter With Input Filter PDFalex696No ratings yet
- A Compact Microprocessor-Based ControllerDocument6 pagesA Compact Microprocessor-Based Controlleralex696No ratings yet
- Open-Loop Instability of The Bridge RectifierDocument7 pagesOpen-Loop Instability of The Bridge Rectifieralex696No ratings yet
- Green Motor Drive (C) PDFDocument14 pagesGreen Motor Drive (C) PDFalex696No ratings yet
- Rectifiers. Transformers and Harmonic FiltersDocument34 pagesRectifiers. Transformers and Harmonic Filtersalex696100% (1)
- High Effective Availability Decentralized UPS HEAD-UPS (C) PDFDocument13 pagesHigh Effective Availability Decentralized UPS HEAD-UPS (C) PDFalex696No ratings yet
- Green Motor Drive©: by Dr. Abe Shahrodi Power Magnetronics SolutionsDocument14 pagesGreen Motor Drive©: by Dr. Abe Shahrodi Power Magnetronics Solutionsalex696No ratings yet
- Green Motor DriveDocument14 pagesGreen Motor Drivealex696No ratings yet
- Design of Input FilterDocument8 pagesDesign of Input Filteralex696No ratings yet
- VAr Measurement at Unity Power FactorDocument5 pagesVAr Measurement at Unity Power Factoralex696No ratings yet
- A Compact Microprocessor-Based ControllerDocument6 pagesA Compact Microprocessor-Based Controlleralex696No ratings yet
- Simulation of 6 Pulse Bridge Converter With Input Filter PDFDocument7 pagesSimulation of 6 Pulse Bridge Converter With Input Filter PDFalex696No ratings yet
- Proton EnergyDocument12 pagesProton Energyalex696No ratings yet
- A Compact Microprocessor-Based ControllerDocument6 pagesA Compact Microprocessor-Based Controlleralex696No ratings yet
- Nomex 414Document4 pagesNomex 414alex696No ratings yet
- Trane VAV Equipment SpecificationsDocument52 pagesTrane VAV Equipment Specificationsyu4212No ratings yet
- CE Board Nov 2020 - Hydraulics - Set 11Document1 pageCE Board Nov 2020 - Hydraulics - Set 11Justine Ejay MoscosaNo ratings yet
- Ultrasafe AESDocument7 pagesUltrasafe AEShuyNo ratings yet
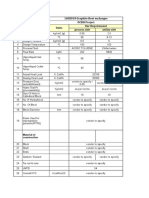
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideDocument2 pages16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaNo ratings yet
- M.Tech. 2nd (Non CBCS) May 2018 - 9 - 5 - 18Document2 pagesM.Tech. 2nd (Non CBCS) May 2018 - 9 - 5 - 18doob marroNo ratings yet
- Manual Udian AL 7021Document6 pagesManual Udian AL 7021Vasudha SharmaNo ratings yet
- Identify Challenges in Relationship Development Final AhahhaDocument2 pagesIdentify Challenges in Relationship Development Final AhahhaKylaNo ratings yet
- Fundamentals of Petroleum Engineering BookDocument10 pagesFundamentals of Petroleum Engineering BookRizwan FaridNo ratings yet
- Account Statement: Karthikeyan S 47asumugaflats, Kamarajarstreet Oragadam Ambattur, Ambattur ChennaiDocument2 pagesAccount Statement: Karthikeyan S 47asumugaflats, Kamarajarstreet Oragadam Ambattur, Ambattur ChennaiKarthikeyan MallikaNo ratings yet
- Web Content Management SystemsDocument30 pagesWeb Content Management SystemsTharmi KNo ratings yet
- TDSC Tpus420 enDocument23 pagesTDSC Tpus420 encatalind_cdNo ratings yet
- 4x16 RM NyyfDocument1 page4x16 RM NyyfjamilNo ratings yet
- Chapter 3 Hydro Thermal SchedulingDocument65 pagesChapter 3 Hydro Thermal Schedulingbik_mesiloveNo ratings yet
- SIRTOS A Simple Real Time Operating SystemDocument6 pagesSIRTOS A Simple Real Time Operating Systemmiguel angelNo ratings yet
- Full Marks: 50 Duration: 3 HoursDocument2 pagesFull Marks: 50 Duration: 3 HoursK JaiswalNo ratings yet
- Inlet Modules Model Code: ExampleDocument1 pageInlet Modules Model Code: ExamplemhasansharifiNo ratings yet
- Bou-Llusar Et Al 2009 EFQM Excellence ModelDocument22 pagesBou-Llusar Et Al 2009 EFQM Excellence Modelfastford14No ratings yet
- Erita Astrid - UPBDocument25 pagesErita Astrid - UPBmas_kinooooNo ratings yet
- Safety Data Sheet: Ingredient Einecs Concentration Symbol(s) Risk Phrases ( )Document9 pagesSafety Data Sheet: Ingredient Einecs Concentration Symbol(s) Risk Phrases ( )panagiotis_panagio_2No ratings yet
- Operation Manual: Smart-UPS Uninterruptible Power SupplyDocument18 pagesOperation Manual: Smart-UPS Uninterruptible Power SupplyHafeez AhmadNo ratings yet
- Concrete Pumping Cop 2005 PDFDocument27 pagesConcrete Pumping Cop 2005 PDFShoaib HassanNo ratings yet
- Ebara Pump Brochure DML-DMLFDocument15 pagesEbara Pump Brochure DML-DMLFkutecoolNo ratings yet
- TM - A5ck, CC, CM - y PDFDocument102 pagesTM - A5ck, CC, CM - y PDFslipargolokNo ratings yet
- Automatic Transmission: Models FA and FB With Allison AT542Document22 pagesAutomatic Transmission: Models FA and FB With Allison AT542nguyenxuanvinhv3No ratings yet
- Drawings Phase IIDocument12 pagesDrawings Phase IIY Go GltdNo ratings yet