You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 10.1 JL Solution Video Essay - (FreeCourseWeb - Com)Document1 page10.1 JL Solution Video Essay - (FreeCourseWeb - Com)MasterArvinNo ratings yet
- 26.4 IELTS Band 9 Model AdvDis Email - (FreeCourseWeb - Com)Document2 pages26.4 IELTS Band 9 Model AdvDis Email - (FreeCourseWeb - Com)MasterArvinNo ratings yet
- 26.5 Essay Corrections Discuss Both Views and Give Your Own Opinion PDF - (FreeCourseWeb - Com)Document2 pages26.5 Essay Corrections Discuss Both Views and Give Your Own Opinion PDF - (FreeCourseWeb - Com)MasterArvinNo ratings yet
- 26.1 Essay Corrections To What Extent Do You Agree or Disagree PDF - (FreeCourseWeb - Com)Document2 pages26.1 Essay Corrections To What Extent Do You Agree or Disagree PDF - (FreeCourseWeb - Com)MasterArvinNo ratings yet
- Examiner Feedback, Philipp @cambridgematerialsDocument3 pagesExaminer Feedback, Philipp @cambridgematerialsMasterArvinNo ratings yet
- Sat Practice Test 5 AnswersDocument49 pagesSat Practice Test 5 AnswersMehedi Kayser PabitraNo ratings yet
- Ultimate IELTS Writing: Learn To Master Task 2: SyllabusDocument6 pagesUltimate IELTS Writing: Learn To Master Task 2: SyllabusMasterArvinNo ratings yet
- General Training IELTS Reading 2Document22 pagesGeneral Training IELTS Reading 2MasterArvinNo ratings yet
- Ch7 - 1 Antennas1Document19 pagesCh7 - 1 Antennas1MasterArvinNo ratings yet
- SAT Test PracticeDocument72 pagesSAT Test PracticeIch LiebeNo ratings yet
- October 2020 - InternationalDocument9 pagesOctober 2020 - InternationalMasterArvin40% (5)
- Applying To The Stream: A Quick-Step Guide: New Brunswick Skilled WorkerDocument1 pageApplying To The Stream: A Quick-Step Guide: New Brunswick Skilled WorkerTopto SurjoNo ratings yet
- TUGAS Literate Women Make Better MothersDocument4 pagesTUGAS Literate Women Make Better MothersYUNDANo ratings yet
- IELTS Reading 1Document16 pagesIELTS Reading 1MasterArvinNo ratings yet
- Reading Passage 1: THE EMPLOYMENT PAGES Saturday EditionDocument18 pagesReading Passage 1: THE EMPLOYMENT PAGES Saturday EditionMasterArvinNo ratings yet
- RF (Radio Frequency) Signal: Medium. Bounded Medium Contains or Confines TheDocument10 pagesRF (Radio Frequency) Signal: Medium. Bounded Medium Contains or Confines TheMasterArvinNo ratings yet
- General Training IELTS Reading 1 PDFDocument19 pagesGeneral Training IELTS Reading 1 PDFMasterArvinNo ratings yet
- Ch7 - 3 Antennas3Document20 pagesCh7 - 3 Antennas3MasterArvinNo ratings yet
- Ch9 Multiplexing2Document22 pagesCh9 Multiplexing2MasterArvinNo ratings yet
- 02 CavityModesDocument112 pages02 CavityModesMasterArvinNo ratings yet
- Ch7 - 2 Antennas2Document40 pagesCh7 - 2 Antennas2MasterArvinNo ratings yet
- Path Loss Over A Reflecting Surface: Appendix BDocument4 pagesPath Loss Over A Reflecting Surface: Appendix BMasterArvinNo ratings yet
- Et M 4106 Tutorial 1Document1 pageEt M 4106 Tutorial 1MasterArvinNo ratings yet
- Laser Assignmentv3Document29 pagesLaser Assignmentv3MasterArvinNo ratings yet
- Performance Analysis of Power Line Communication Using DS-CDMA Technique With Adaptive Laguerre FiltersDocument5 pagesPerformance Analysis of Power Line Communication Using DS-CDMA Technique With Adaptive Laguerre FiltersMasterArvinNo ratings yet
- A Synthetic MIMO PLC Channel ModelDocument4 pagesA Synthetic MIMO PLC Channel ModelMasterArvinNo ratings yet
- 1-Introduction To LasersDocument9 pages1-Introduction To LasersMasterArvinNo ratings yet
- UniMasr.com_350a90a63c6232e11877206a5ae48ce5Document9 pagesUniMasr.com_350a90a63c6232e11877206a5ae48ce5MasterArvinNo ratings yet
- 04 Laser ModesDocument15 pages04 Laser Modesabhilasha11No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- TIG 250 PAC-DC (R62) Protel Schematic & Footprints PCB & Service ManualDocument18 pagesTIG 250 PAC-DC (R62) Protel Schematic & Footprints PCB & Service ManualhosseinarevanNo ratings yet
- Tl071, Tl071a, Tl071b, Tl072 Tl072a, Tl072b, Tl074, Tl074a, Tl074bDocument36 pagesTl071, Tl071a, Tl071b, Tl072 Tl072a, Tl072b, Tl074, Tl074a, Tl074bEиchoNo ratings yet
- SAE REEV 1 Pager Ver4.0-For StudentsDocument9 pagesSAE REEV 1 Pager Ver4.0-For StudentsTeam AryabhataNo ratings yet
- Champ T400: The World Class Inverter Based DC WelderDocument2 pagesChamp T400: The World Class Inverter Based DC WelderNaresh ANo ratings yet
- BJT and MosfetDocument10 pagesBJT and MosfetankitabcNo ratings yet
- E2.2S 2500 Ekip Touch LSIG 3p F HRDocument3 pagesE2.2S 2500 Ekip Touch LSIG 3p F HRAbdullrahim AlastalNo ratings yet
- AFEDocument2 pagesAFEJair SandovalNo ratings yet
- What Is A Light Activated Silicon Controlled Rectifier - (LASCR)Document8 pagesWhat Is A Light Activated Silicon Controlled Rectifier - (LASCR)Donika Markande0% (1)
- 003 RF Power ModulesDocument6 pages003 RF Power Modulesalexandreassf150% (2)
- AC Switches DC Switches: Click To ViewDocument32 pagesAC Switches DC Switches: Click To ViewY.a. OoiNo ratings yet
- TMC2226 V1.0 інструкціяDocument5 pagesTMC2226 V1.0 інструкціяІгор КарплюкNo ratings yet
- Sola SCP Series 2-3 Output Ac-Dc ConverterDocument2 pagesSola SCP Series 2-3 Output Ac-Dc ConverteredgargadoNo ratings yet
- Lecture 3Document41 pagesLecture 3Patrick GorospeNo ratings yet
- HS014 - Portable Electrical Equipment InspectorDocument1 pageHS014 - Portable Electrical Equipment InspectorRetselisitsoe100% (4)
- PP14 00 Bac Ece Als 002 R0 PDFDocument4 pagesPP14 00 Bac Ece Als 002 R0 PDFvolcanox12No ratings yet
- How To Make A Negative Ion Air IonizerDocument24 pagesHow To Make A Negative Ion Air IonizergabigowrielNo ratings yet
- 4 20ma ConversionDocument4 pages4 20ma ConversionAshwin HariNo ratings yet
- Electronics Construction Manual: Mitchelectronics 2019 Version 3-04/02/2019Document16 pagesElectronics Construction Manual: Mitchelectronics 2019 Version 3-04/02/2019EbrahemAlatfeNo ratings yet
- Batch 3 Report 18.06.22Document68 pagesBatch 3 Report 18.06.22Sujesh ChittarikkalNo ratings yet
- Coelmo'S Gen Sets DM Series: WWW - Jeepsea.Co - IlDocument25 pagesCoelmo'S Gen Sets DM Series: WWW - Jeepsea.Co - IlMedrouaNo ratings yet
- Manual Rele SickDocument6 pagesManual Rele SickElian SilvaNo ratings yet
- Cross Reference SearchDocument1 pageCross Reference SearchLourencosud SudNo ratings yet
- 1 400kv Varsana Control Protection PhilosophyDocument3 pages1 400kv Varsana Control Protection PhilosophyKishore KumarNo ratings yet
- Ethernet Cable: Local Area Networks, 2009 SpringDocument20 pagesEthernet Cable: Local Area Networks, 2009 Springcool4all89No ratings yet
- I - Ficha-Inversor-Must-5000w-48v-Mppt80Document1 pageI - Ficha-Inversor-Must-5000w-48v-Mppt80Efrain Juan Ticona CondoriNo ratings yet
- Relay CatalogueDocument38 pagesRelay CatalogueИгорьNo ratings yet
- Hope 3.3L-C1 Standalone Quick Guidance V1.0Document12 pagesHope 3.3L-C1 Standalone Quick Guidance V1.0Meteorología y Climatología 2do TrekkingNo ratings yet
- DSE4510 MKII DSE4520 MKII Installation InstructionsDocument2 pagesDSE4510 MKII DSE4520 MKII Installation InstructionsManuel Estrela Brito Junior67% (3)
- TASK 2: TRIAC Characteristics Part I. NI Multisim Set-UpDocument12 pagesTASK 2: TRIAC Characteristics Part I. NI Multisim Set-UpCharmae BonggoNo ratings yet
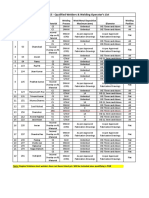
- 1255 - Qualified Welder ListDocument1 page1255 - Qualified Welder ListattaullaNo ratings yet