You might also like
- Nauticus 3D BeamDocument114 pagesNauticus 3D BeamMinca AndreiNo ratings yet
- Watergems - How To Design A Water Distribution SystemDocument3 pagesWatergems - How To Design A Water Distribution SystemhiyogsNo ratings yet
- Injection Molding TrainingDocument131 pagesInjection Molding TrainingNuria Varela100% (3)
- Design of A 30 Storey Office Building With Reinforced Concrete Design Using Etabs Structural SoftwareDocument51 pagesDesign of A 30 Storey Office Building With Reinforced Concrete Design Using Etabs Structural SoftwareAyodele Oluwaseyi Dina100% (1)
- RISC Vs CISCDocument13 pagesRISC Vs CISCBehin SamNo ratings yet
- Din en 14080-2005Document36 pagesDin en 14080-2005Debreteni Florin100% (2)
- Textbook of Urgent Care Management: Chapter 35, Urgent Care Imaging and InterpretationFrom EverandTextbook of Urgent Care Management: Chapter 35, Urgent Care Imaging and InterpretationNo ratings yet
- Sensors Distance Measurement Using ArduinoDocument6 pagesSensors Distance Measurement Using Arduinonikna100% (2)
- Engineering Data Analysis (Mod2)Document7 pagesEngineering Data Analysis (Mod2)Mark Peru100% (1)
- Ultrasonic SensorDocument6 pagesUltrasonic SensorJane100% (1)
- Ultrasonic SensorDocument5 pagesUltrasonic SensorKarla VillamerNo ratings yet
- Pass Ultrasound Physics Exam Study Guide ReviewFrom EverandPass Ultrasound Physics Exam Study Guide ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- BEP Pages 5 16Document12 pagesBEP Pages 5 16Amy LauNo ratings yet
- SAES-A-102 Ambient Air Quality and Source Emissions StandardsDocument21 pagesSAES-A-102 Ambient Air Quality and Source Emissions StandardsFlorante NoblezaNo ratings yet
- Training CoursesDocument16 pagesTraining CoursesFeroz KhanNo ratings yet
- Wall Following Robot Obstacle Avoiding RobotDocument9 pagesWall Following Robot Obstacle Avoiding RobotMuhammad FaisalNo ratings yet
- Synopsis 1Document7 pagesSynopsis 1ashu yadavNo ratings yet
- Ultrasonic SensorsDocument21 pagesUltrasonic Sensorsbatvengeance2355No ratings yet
- HC sr04Document4 pagesHC sr04Abdullah ZafarNo ratings yet
- Report Mini ProjectDocument16 pagesReport Mini ProjectAbhilash Chandran JNo ratings yet
- BEU 6233 Biomedical Sensor & Transducer-E: Name No - MatricsDocument10 pagesBEU 6233 Biomedical Sensor & Transducer-E: Name No - Matricsahmad faizNo ratings yet
- Lab 4Document10 pagesLab 4ahmad faizNo ratings yet
- Job5 Iot Rani Mu'ArifahDocument9 pagesJob5 Iot Rani Mu'Arifah019Rani Mu'arifahNo ratings yet
- Project Ultrasonic Range FinderDocument7 pagesProject Ultrasonic Range FinderSufiyan SiddiqueNo ratings yet
- Smart Blind StickDocument15 pagesSmart Blind Stickunzilarauf39No ratings yet
- Hc-sr04 Ultrasonic Module User GuideDocument4 pagesHc-sr04 Ultrasonic Module User Guidecandidootero100% (1)
- Ultrasonic Sensor Object Detection System Project ReportDocument10 pagesUltrasonic Sensor Object Detection System Project Reportsltanbrhane50No ratings yet
- Arduino IR&USDocument5 pagesArduino IR&USyerni ganeshNo ratings yet
- Iot 5Document4 pagesIot 5Ram RamNo ratings yet
- Final Notes For Ultrasonic SensorDocument13 pagesFinal Notes For Ultrasonic SensorLiado JiuNo ratings yet
- Ultrasonic Distance Meter Embedded System Project Explains About Developing NewDocument63 pagesUltrasonic Distance Meter Embedded System Project Explains About Developing NewSahil SethiNo ratings yet
- Development of Smart Blind StickDocument7 pagesDevelopment of Smart Blind StickxpeprisheyNo ratings yet
- Capstone Project 2 FinalDocument35 pagesCapstone Project 2 FinalAmarjeet SinghNo ratings yet
- LAB 7 EmiDocument10 pagesLAB 7 EmiHassan AamerNo ratings yet
- C08 Rme PPT1 21221Document45 pagesC08 Rme PPT1 21221DHANANJAY VIJAYKUMAR BILENo ratings yet
- Exp 5Document3 pagesExp 5jasmhmyd205No ratings yet
- FP GCDocument18 pagesFP GCHenok AbawaNo ratings yet
- Ultrasonic SensorDocument7 pagesUltrasonic SensorCLAS COACHINGNo ratings yet
- L11 NotesDocument4 pagesL11 NotesRichin Varghese100% (1)
- Ultrasonic HC-SR04 PDFDocument4 pagesUltrasonic HC-SR04 PDFDhany SSat0% (1)
- IOT Project POSTERDocument1 pageIOT Project POSTERFemilNo ratings yet
- Ultrasonic Distance Measure Robot (ULTRA-4) : Project Report 2012-2013Document63 pagesUltrasonic Distance Measure Robot (ULTRA-4) : Project Report 2012-2013Shweta PrabhuNo ratings yet
- Final ReportDocument8 pagesFinal ReportAkrit YadavNo ratings yet
- Lecture 13Document9 pagesLecture 13Azam KhanNo ratings yet
- EET-126 Lab 6 InstructionsDocument10 pagesEET-126 Lab 6 Instructionskugarajravi2002No ratings yet
- HC SR04 EtcDocument6 pagesHC SR04 EtcnickeryeieiNo ratings yet
- Precsion Lab 4Document4 pagesPrecsion Lab 4Areeba MujtabaNo ratings yet
- Title HC SR04 Ultrasonic Distance Sensor Using ArduinoDocument4 pagesTitle HC SR04 Ultrasonic Distance Sensor Using Arduinodragh meh downNo ratings yet
- Sri Indu Institute of Engineering and TechnologyDocument21 pagesSri Indu Institute of Engineering and TechnologyMallikarjunNo ratings yet
- Distance Detection SystemDocument11 pagesDistance Detection SystemFemilNo ratings yet
- Edp 4 PartDocument4 pagesEdp 4 PartShehreyar MahboobNo ratings yet
- Ultrasonic - KJWDocument13 pagesUltrasonic - KJWJavohir BuvanazarovNo ratings yet
- Ultrasonic Rangefinder Using 8051Document25 pagesUltrasonic Rangefinder Using 8051Kaos Polos Nakira50% (4)
- Design and Development of Microcontroller Based Ultrasonic Flaw DetectorDocument7 pagesDesign and Development of Microcontroller Based Ultrasonic Flaw DetectorBagusElokNo ratings yet
- ReportDocument27 pagesReportThinh LêNo ratings yet
- Distance Sensing Using Ultrasonic Sensor & Arduino: A Mini Project Presentation OnDocument17 pagesDistance Sensing Using Ultrasonic Sensor & Arduino: A Mini Project Presentation OnRishi RajNo ratings yet
- How To Detect Objects With HC-SR04 Ultrasonic Sensor, Arduino and Millis - Into RoboticsDocument1 pageHow To Detect Objects With HC-SR04 Ultrasonic Sensor, Arduino and Millis - Into RoboticscrazyparkstecNo ratings yet
- Exp. No.: 4 Date: Arduino Based Ultrasonic Distance Sensor AIMDocument8 pagesExp. No.: 4 Date: Arduino Based Ultrasonic Distance Sensor AIMYenigalla Kireeti SaiNo ratings yet
- Footboard Travel Alert SystemDocument40 pagesFootboard Travel Alert SystemSaravanan Viswakarma100% (2)
- UltrasonicDocument4 pagesUltrasonicNaurin NaushadNo ratings yet
- Auto-Smart Obstacle DetectionDocument5 pagesAuto-Smart Obstacle DetectionIJSTENo ratings yet
- ULTRpo SONIC0 SENSORDocument1 pageULTRpo SONIC0 SENSORBalagovind BaluNo ratings yet
- Ultrasonic Distance SensorDocument6 pagesUltrasonic Distance SensorJunaid AhmedNo ratings yet
- Basic Electronics End Semester Project ReportDocument4 pagesBasic Electronics End Semester Project ReportFaiqa SaleemNo ratings yet
- Distance Measurement Using Ultrasonic Sensor and ArduinoDocument10 pagesDistance Measurement Using Ultrasonic Sensor and Arduinotejender singhNo ratings yet
- Measures The Distance of A Target ObjectDocument8 pagesMeasures The Distance of A Target ObjectPREETI SAI THANDAVAN 20BCE1740No ratings yet
- Arduino Based Ultrasonic Range Finder - AbstractDocument3 pagesArduino Based Ultrasonic Range Finder - AbstractVIKAS PANDEYNo ratings yet
- Report 1Document2 pagesReport 1BILAL AHMEDNo ratings yet
- Arduino and HC-SR04 Ultrasonic SensorDocument11 pagesArduino and HC-SR04 Ultrasonic SensorVarli ArsolNo ratings yet
- Third Eye For The BlindDocument12 pagesThird Eye For The BlindRajalakshmi75% (4)
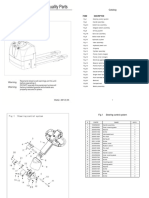
- Catalog: Ningbo Liftstar Material Handling Equipment Co., LTDDocument27 pagesCatalog: Ningbo Liftstar Material Handling Equipment Co., LTDKiều Văn TrungNo ratings yet
- Pyroelectric Array CameraDocument7 pagesPyroelectric Array Cameraziggie_lenzNo ratings yet
- Grasses Their Use in BuildingDocument8 pagesGrasses Their Use in BuildingpitufitoNo ratings yet
- Final ProjectDocument4 pagesFinal Projectsajad soleymanzadeNo ratings yet
- Bomet CountyDocument1 pageBomet CountyPrince AliNo ratings yet
- V7.0 Function ListDocument48 pagesV7.0 Function ListInyectronix VyhNo ratings yet
- Wind Energy Unit-EEEDocument6 pagesWind Energy Unit-EEEpfalencarNo ratings yet
- SampleDocument2 pagesSamplesaurabhverma08No ratings yet
- Refrigerator: Service ManualDocument44 pagesRefrigerator: Service ManualBetileno QuadAlexNo ratings yet
- Chapter5 Memory ManagementDocument78 pagesChapter5 Memory ManagementJackYuan JinFengNo ratings yet
- A340-Elec Emer ConfigDocument13 pagesA340-Elec Emer ConfigGerhard StorbeckNo ratings yet
- DHLDocument3 pagesDHLfmartinNo ratings yet
- Material Characterization of Sugarcane Bagasseepoxy Composites For - 2022Document5 pagesMaterial Characterization of Sugarcane Bagasseepoxy Composites For - 2022bakhrul ilmiNo ratings yet
- Slum FinalDocument46 pagesSlum FinalSanghita Bhowmick83% (6)
- Chip Scale Atomic Magnetometer Based On SERFDocument4 pagesChip Scale Atomic Magnetometer Based On SERFluckystar83100% (2)
- Denon CD Player C680Document2 pagesDenon CD Player C680Mujeeb SiddiquiNo ratings yet
- TSM SmokeDocument2 pagesTSM SmokeSudin AmatyaNo ratings yet
- Raman Spectroscopy SetupDocument13 pagesRaman Spectroscopy SetupRafael RamosNo ratings yet
- MMPB 730 RerollDocument4 pagesMMPB 730 RerollLuis Padilla SandovalNo ratings yet
- Synopsis of Power FactorDocument10 pagesSynopsis of Power FactorRavi TiwariNo ratings yet