You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Periodic Table & PeriodicityDocument22 pagesPeriodic Table & PeriodicityMike hunkNo ratings yet
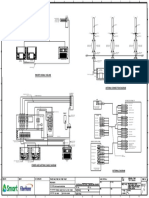
- Rbs/Bts Signal Cabling: DF PanelDocument1 pageRbs/Bts Signal Cabling: DF PanelMayuSalanggaNo ratings yet
- Christopher Saint, Judy Saint-IC Mask Design - Essential Layout TechniquesDocument481 pagesChristopher Saint, Judy Saint-IC Mask Design - Essential Layout TechniquesPraveenNo ratings yet
- Bts SystemDocument8 pagesBts Systemrashm006ranjanNo ratings yet
- 24 Electrical PowerDocument172 pages24 Electrical PowerNurlan CebrayilzadeNo ratings yet
- Ee101 Basics of Electrical Engineering (End - SP19)Document2 pagesEe101 Basics of Electrical Engineering (End - SP19)soronaj532No ratings yet
- Serial + Crack READ MEDocument2 pagesSerial + Crack READ MEtoza74100% (1)
- Ele GenDocument10 pagesEle Gensanju08388458No ratings yet
- Frequency Ranges: H5: 518.000-542.000 MHZDocument5 pagesFrequency Ranges: H5: 518.000-542.000 MHZJNo ratings yet
- SLC Wiring Manual-51253Document80 pagesSLC Wiring Manual-51253teum3250% (8)
- Application of NanomatetialsDocument5 pagesApplication of NanomatetialsGinopragathishNo ratings yet
- Raychem ES EU1007 XLTraceFlowMaintenance enDocument2 pagesRaychem ES EU1007 XLTraceFlowMaintenance enSINIŠA PRETKOVIĆNo ratings yet
- Catalog Kocom 2011Document14 pagesCatalog Kocom 2011jeckie2No ratings yet
- Ch. 11: Liquids and Intermolecular Forces: - GasesDocument22 pagesCh. 11: Liquids and Intermolecular Forces: - GasesJozel Bryan Mestiola TerrìbleNo ratings yet
- STB 11 NK 50 ZDocument16 pagesSTB 11 NK 50 ZLEB 280No ratings yet
- Artificial Transmission Line Dec 16Document33 pagesArtificial Transmission Line Dec 16Arindam SenNo ratings yet
- MM850102-03 UniCal RTDDocument43 pagesMM850102-03 UniCal RTDctmtectrolNo ratings yet
- Butt Fusion Machines Small-Medium - V2 - LowDocument12 pagesButt Fusion Machines Small-Medium - V2 - LowViorel TomaNo ratings yet
- Envivio G6 Series DS-2015-05 r01Document3 pagesEnvivio G6 Series DS-2015-05 r01saefulNo ratings yet
- Napolcom Exam ReviewerDocument15 pagesNapolcom Exam ReviewerIrene FriasNo ratings yet
- MPCW2201SP 6-30-2020 PDFDocument1,229 pagesMPCW2201SP 6-30-2020 PDFMaximiliano AndrésNo ratings yet
- SMB/4144/R: Strategic Business Plan (SBP)Document5 pagesSMB/4144/R: Strategic Business Plan (SBP)ytumayNo ratings yet
- V-Log/V-Gamut: Reference ManualDocument7 pagesV-Log/V-Gamut: Reference ManualPufa DjuartonoNo ratings yet
- Tdoct5999a UsaDocument100 pagesTdoct5999a UsambidNo ratings yet
- Lecture 2 - Modern Computer SystemsDocument44 pagesLecture 2 - Modern Computer SystemsKisarach PhilipsNo ratings yet
- Assignment PDFDocument2 pagesAssignment PDFKapil JoshiNo ratings yet
- D Ia 16e 0409 FG-100 FF Z PDFDocument2 pagesD Ia 16e 0409 FG-100 FF Z PDFsharky1673No ratings yet
- Pinout Connector MercedesDocument4 pagesPinout Connector MercedesEasydiag Quikcar50% (2)
- Humble Homemade Hifi - ModulusDocument7 pagesHumble Homemade Hifi - ModulusmerrickNo ratings yet
- Message Authentication For Can Bus and Autosar Software ArchitectureDocument135 pagesMessage Authentication For Can Bus and Autosar Software ArchitecturebitzabladeNo ratings yet