You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Electrical ProtectionDocument94 pagesElectrical ProtectionNeil Summer100% (7)
- TDT 172718DE 65Fv03Document1 pageTDT 172718DE 65Fv03Ildar MusalimovNo ratings yet
- One-Line Diagram - OLV Pres1 (Transient Stability Analysis)Document2 pagesOne-Line Diagram - OLV Pres1 (Transient Stability Analysis)FlamingorosadoNo ratings yet
- 0 34 Chain Conveyor RL and RMDocument1 page0 34 Chain Conveyor RL and RMFlamingorosadoNo ratings yet
- Olflex Classic 110 SY: Steel Braided Flexible Control Cable Number CodedDocument1 pageOlflex Classic 110 SY: Steel Braided Flexible Control Cable Number CodedFlamingorosadoNo ratings yet
- Westinghouse Brand GuidelinesDocument18 pagesWestinghouse Brand GuidelinesFlamingorosado100% (1)
- Cyclopedia of Appl 02 AmerDocument488 pagesCyclopedia of Appl 02 AmerFlamingorosadoNo ratings yet
- PotterFich TheoryOfNetworksAndLinesDocument452 pagesPotterFich TheoryOfNetworksAndLinesFlamingorosadoNo ratings yet
- L33A - Power CharacteristicsDocument19 pagesL33A - Power CharacteristicsArshpreet SinghNo ratings yet
- Invertec CVCC 500 Manual BookDocument22 pagesInvertec CVCC 500 Manual BookSuryana MamanNo ratings yet
- MWA - 15EC71 - Module Wise Question BankDocument14 pagesMWA - 15EC71 - Module Wise Question BankRohit Chandran100% (3)
- ServiceDocument3 pagesServiceJustin WilliamsNo ratings yet
- Electromagnetic Waves and Maxwells EquationsDocument12 pagesElectromagnetic Waves and Maxwells Equationssneha mukherjeeNo ratings yet
- Unit 1: Electricity: A. Fill in The BlanksDocument7 pagesUnit 1: Electricity: A. Fill in The BlanksBhausaheb PatilNo ratings yet
- 140M Motor Protection Circuit Breaker For Multiple Motor Installation With DrivesDocument2 pages140M Motor Protection Circuit Breaker For Multiple Motor Installation With DrivesNelsonNo ratings yet
- Bifacial Glass To Glass ModuleDocument5 pagesBifacial Glass To Glass ModulePushkraj PatilNo ratings yet
- Operation Manual of NPFC Series Li-Ion Batteries - 0423 (V8.1)Document22 pagesOperation Manual of NPFC Series Li-Ion Batteries - 0423 (V8.1)hariesha5722No ratings yet
- Against Material For STG Project / Gso Maintainance Mepco MultanDocument4 pagesAgainst Material For STG Project / Gso Maintainance Mepco MultanShahzad ShafiNo ratings yet
- Statistical-Physical Models of Electromagnetic Interference PDFDocument22 pagesStatistical-Physical Models of Electromagnetic Interference PDFAnonymous P2ZN8XNo ratings yet
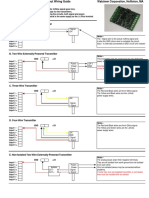
- 4-20ma Input WiringDocument2 pages4-20ma Input WiringAnurag Gupta100% (1)
- Fiche Technique 500489 Thermistance PTC TDK b59990 c120 A70 55 1 PcsDocument15 pagesFiche Technique 500489 Thermistance PTC TDK b59990 c120 A70 55 1 PcsBelghennou Hadj AliNo ratings yet
- Inductive Sensor NBN4-8GM35-E2: DimensionsDocument2 pagesInductive Sensor NBN4-8GM35-E2: DimensionsRega PrimastaNo ratings yet
- Topik 5 - Introduction To Other Semiconductor ComponentsDocument27 pagesTopik 5 - Introduction To Other Semiconductor ComponentsfaizahNo ratings yet
- 26lv2500-Ug Chassis La01yDocument45 pages26lv2500-Ug Chassis La01ygarymorNo ratings yet
- The Spark Plug Cleaner and Tester Is of Metal ConstructionDocument19 pagesThe Spark Plug Cleaner and Tester Is of Metal ConstructionSundaravathanan Chellappan100% (1)
- 06616415Document5 pages06616415jitu_4No ratings yet
- 8032M0 Iskra ENDocument2 pages8032M0 Iskra ENArîfNo ratings yet
- Detailed Lesson PlanDocument3 pagesDetailed Lesson PlanmatnogalfredNo ratings yet
- DTQ27S3FC Service ManualDocument45 pagesDTQ27S3FC Service ManualDavid Castillo CerdaNo ratings yet
- Engr Josh ReportDocument85 pagesEngr Josh ReportTEMIDAYONo ratings yet
- Basic Electrical Engineering (14ele15-14ele25)Document3 pagesBasic Electrical Engineering (14ele15-14ele25)Swati MuttuNo ratings yet
- Breadboard BasicsDocument2 pagesBreadboard BasicsAbhishek GoudarNo ratings yet
- SSED - Solved Problems For Chapter 0-1Document3 pagesSSED - Solved Problems For Chapter 0-1MINH NGUYỄN THẾNo ratings yet
- ComPacT NSX - New Generation - C10F3TM100Document3 pagesComPacT NSX - New Generation - C10F3TM100Pharmacist ShimaaNo ratings yet
- Circuit Schematic SymbolsDocument7 pagesCircuit Schematic SymbolsRajesh KannanNo ratings yet
- Light Is Compact-OEM 4S OT-FIT-LT2-S 17EN PreviewDocument4 pagesLight Is Compact-OEM 4S OT-FIT-LT2-S 17EN PreviewHoang HaNo ratings yet
- Nokian CapacitorsDocument2 pagesNokian CapacitorsMario Penelo RivaNo ratings yet