You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Motion Along A Straight Line SPM 2003 - 2011Document4 pagesMotion Along A Straight Line SPM 2003 - 2011Ni'mazakirah Ab Rahman100% (1)
- Crystal Lattice - Crystal SystemDocument5 pagesCrystal Lattice - Crystal SystemabhishekNo ratings yet
- 1.easa Part 66 Mod.1 1Document80 pages1.easa Part 66 Mod.1 1Tharrmaselan manimaranNo ratings yet
- Plane Kinematics of Rigid Bodies: 2141263 Dynamics & Vibrations, NAVDocument15 pagesPlane Kinematics of Rigid Bodies: 2141263 Dynamics & Vibrations, NAVAbdel DaaNo ratings yet
- Save Views in The Model Browser: Topic DetailsDocument2 pagesSave Views in The Model Browser: Topic DetailsAbdel DaaNo ratings yet
- Radioss Theory Manual: 10.0 Version - January 2009 Large Displacement Finite Element AnalysisDocument179 pagesRadioss Theory Manual: 10.0 Version - January 2009 Large Displacement Finite Element AnalysisAbdel DaaNo ratings yet
- HW3,4 Due 02 18 09Document1 pageHW3,4 Due 02 18 09Abdel DaaNo ratings yet
- Abaqus Tutorial 1 Basic BracketDocument17 pagesAbaqus Tutorial 1 Basic BracketAbdel DaaNo ratings yet
- Solid TrimDocument2 pagesSolid TrimAbdel DaaNo ratings yet
- # 1070: To Generate HTML Mesh Quality Report: Topic ObjectiveDocument3 pages# 1070: To Generate HTML Mesh Quality Report: Topic ObjectiveAbdel DaaNo ratings yet
- − 4λ + 3 = 0, so λ = 1, 3. The eigenvectors are −1, .: Linear algebra II 2012 final exam solutionsDocument2 pages− 4λ + 3 = 0, so λ = 1, 3. The eigenvectors are −1, .: Linear algebra II 2012 final exam solutionsAbdel DaaNo ratings yet
- Lexical FieldsDocument1 pageLexical FieldsAbdel DaaNo ratings yet
- Toeic G 122309Document10 pagesToeic G 122309Abdel DaaNo ratings yet
- Reading Texts (Time-Consuming: Be Quick !)Document1 pageReading Texts (Time-Consuming: Be Quick !)Abdel DaaNo ratings yet
- Application Exercise: Match The Words That Go Together (Collocation)Document4 pagesApplication Exercise: Match The Words That Go Together (Collocation)Abdel DaaNo ratings yet
- EXERCISE ON PREPOSITIONS: Fill in The Blanks Exercise 1Document2 pagesEXERCISE ON PREPOSITIONS: Fill in The Blanks Exercise 1Abdel DaaNo ratings yet
- Linear Algebra II Homework #3Document1 pageLinear Algebra II Homework #3Abdel DaaNo ratings yet
- HowardRuppWeickum AbstractDocument1 pageHowardRuppWeickum AbstractAbdel DaaNo ratings yet
- Please Plan For 20 Min Talk, Leaving 10 Min For Computer Setup & QuestionsDocument1 pagePlease Plan For 20 Min Talk, Leaving 10 Min For Computer Setup & QuestionsAbdel DaaNo ratings yet
- Markovchick Schoomaker SnowDocument17 pagesMarkovchick Schoomaker SnowAbdel DaaNo ratings yet
- Rodriguez Report PDFDocument38 pagesRodriguez Report PDFAbdel DaaNo ratings yet
- Les 13Document2 pagesLes 13Abdel DaaNo ratings yet
- Possible Topics For Asen 6367 Term Project - Spring 2009: List Compiled As of March 15, 2009Document1 pagePossible Topics For Asen 6367 Term Project - Spring 2009: List Compiled As of March 15, 2009Abdel DaaNo ratings yet
- International Singapore Maths Competition 2017 (Primary 4) : Instructions To ParticipantsDocument12 pagesInternational Singapore Maths Competition 2017 (Primary 4) : Instructions To ParticipantsAileen MimeryNo ratings yet
- Projections of SolidsDocument20 pagesProjections of SolidsSuneel Kumar MeenaNo ratings yet
- 7.5 Application of VectorsDocument4 pages7.5 Application of Vectorsrk545No ratings yet
- Mathematics PQMSDocument13 pagesMathematics PQMSPlayer dude65No ratings yet
- Chain Rule To Extreme Value and Saddle PointsDocument83 pagesChain Rule To Extreme Value and Saddle PointsVishwas SainiNo ratings yet
- Analysis and ProbabilityDocument320 pagesAnalysis and ProbabilitySiddharth Sharma100% (2)
- Imo Class-1Document3 pagesImo Class-1deepvineetNo ratings yet
- SVKM MD&CG SyllabusDocument2 pagesSVKM MD&CG SyllabusmitmandsaurNo ratings yet
- CBSE Maths Paper 2 (QP)Document6 pagesCBSE Maths Paper 2 (QP)Acharya Dronacharya Foundation CenterNo ratings yet
- SOLIDWORKS Mouse Gestures Document.Document21 pagesSOLIDWORKS Mouse Gestures Document.Emilien ChesneyNo ratings yet
- Unit 1Document7 pagesUnit 1pankaj12345katreNo ratings yet
- 17204-2019-Winter-Question-Paper (Msbte Study Resources)Document8 pages17204-2019-Winter-Question-Paper (Msbte Study Resources)pr gamingNo ratings yet
- Grade 6 GeometryDocument6 pagesGrade 6 GeometryNguyen Thi Thien MinhNo ratings yet
- Ot 4Document13 pagesOt 4ZZROTNo ratings yet
- CG (Window To Viewport Transformation) : BITS PilaniDocument17 pagesCG (Window To Viewport Transformation) : BITS PilaniYash GuptaNo ratings yet
- TCW2204200808 Engineering Survey IIDocument5 pagesTCW2204200808 Engineering Survey IILindelwe MoyoNo ratings yet
- MTRP 2018 - 9Document2 pagesMTRP 2018 - 9Nimai RoyNo ratings yet
- Education Bureau Territory-Wide System Assessment 2019 Secondary 3 Mathematics Question BookletDocument20 pagesEducation Bureau Territory-Wide System Assessment 2019 Secondary 3 Mathematics Question BookletJake WongNo ratings yet
- Manipulator Dynamics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentDocument44 pagesManipulator Dynamics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentWajdi SadiqNo ratings yet
- Module 1Document29 pagesModule 1Jeslyn MonteNo ratings yet
- Realignment of CurvesDocument52 pagesRealignment of CurvesMiguel Ivan Acosta Mondragon100% (1)
- 2002 JBMO ShortlistDocument2 pages2002 JBMO ShortlisthoedaadallamNo ratings yet
- Math RevDocument4 pagesMath RevEdmond BajadoNo ratings yet
- Perimeter and Area Formulas For Two Dimensional Geometrical FiguresDocument4 pagesPerimeter and Area Formulas For Two Dimensional Geometrical Figuresmj03127477706No ratings yet
- 2012 KadettDocument3 pages2012 KadettjnNo ratings yet
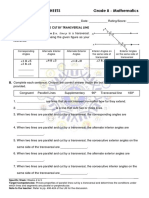
- Learning Activity Sheets Grade 8 - MathematicsDocument4 pagesLearning Activity Sheets Grade 8 - MathematicsThe BeastNo ratings yet
- 1985-Orientational Analysis, Tensor Analysis and The Group Properties of The SI Supplementary units-IIDocument18 pages1985-Orientational Analysis, Tensor Analysis and The Group Properties of The SI Supplementary units-IIMichael HobbsNo ratings yet