You might also like
- Determination of A Synchronous Generator Characteristics Via Finite Element AnalysisDocument6 pagesDetermination of A Synchronous Generator Characteristics Via Finite Element Analysisamin342No ratings yet
- Electrooptically-Active Slow-Light-Enhanced Silicon Slot Photonic Crystal WaveguidesDocument4 pagesElectrooptically-Active Slow-Light-Enhanced Silicon Slot Photonic Crystal Waveguidesyuvabala2002123No ratings yet
- 1 s2.0 S0957415899000082 MainDocument17 pages1 s2.0 S0957415899000082 MainEdgar GuerreroNo ratings yet
- Analysis of Slotless-Type PM Linear Brushless Motor Using EMC MethodDocument6 pagesAnalysis of Slotless-Type PM Linear Brushless Motor Using EMC MethodHuber CallataNo ratings yet
- Controller ExcitationDocument8 pagesController ExcitationSri SaiNo ratings yet
- 385 BacherDocument4 pages385 BacherManuel PerezNo ratings yet
- Vector Control of A Permanent-Magnet Synchronous Motor Using AC-AC Matrix ConverterDocument11 pagesVector Control of A Permanent-Magnet Synchronous Motor Using AC-AC Matrix ConverterKushagra KhamesraNo ratings yet
- Axial Flux PM Machine Field Weakening CapabilityDocument2 pagesAxial Flux PM Machine Field Weakening CapabilityJavo VerdugoNo ratings yet
- Damper Winding Influence On UMPDocument8 pagesDamper Winding Influence On UMPSrinivas KamarsuNo ratings yet
- Novel Clamping Force Control For Electric Parking Brake SystemsDocument6 pagesNovel Clamping Force Control For Electric Parking Brake SystemsAhmed AlostazNo ratings yet
- Multi-Motor DrivesDocument6 pagesMulti-Motor DrivessriabolfazlNo ratings yet
- Analysis of Detent Torque in Hybrid Stepping Motors: Jonathan U AgberDocument7 pagesAnalysis of Detent Torque in Hybrid Stepping Motors: Jonathan U AgbertheijesNo ratings yet
- Sliding Mode Controls of Active and Reactive Power of A DFIG With MPPT For Variable Speed Wind Energy ConversionDocument13 pagesSliding Mode Controls of Active and Reactive Power of A DFIG With MPPT For Variable Speed Wind Energy ConversionelecnaimelecNo ratings yet
- Influence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationDocument5 pagesInfluence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationBOUZ2010No ratings yet
- Finite-Element Analysis of A Constant-ForceDocument8 pagesFinite-Element Analysis of A Constant-Forcescribd_20_emmanuelfaureNo ratings yet
- E 2 Sin (PN + N), M 2pfo Appn YDocument3 pagesE 2 Sin (PN + N), M 2pfo Appn YDeepak SharmaNo ratings yet
- Damage Monitoring of Ball Bearing: Annals of The CIRP Vol. 55/1/2006Document4 pagesDamage Monitoring of Ball Bearing: Annals of The CIRP Vol. 55/1/2006Smart Z HereNo ratings yet
- Vibration Energy Harvesting Device Based On Asymmetric Air-Spaced Cantilevers For Tire Pressure Monitoring SystemDocument4 pagesVibration Energy Harvesting Device Based On Asymmetric Air-Spaced Cantilevers For Tire Pressure Monitoring Systemamir8100No ratings yet
- Neural Network Control For A Semi-Active Vehicle Suspension With A Magnetorheological DamperDocument11 pagesNeural Network Control For A Semi-Active Vehicle Suspension With A Magnetorheological DamperHarsh PothanisNo ratings yet
- Vibration AnalysisDocument12 pagesVibration AnalysistheealokNo ratings yet
- FEM Analysis of Hydrogenerator Performance During Field Short-Circuit FaultDocument6 pagesFEM Analysis of Hydrogenerator Performance During Field Short-Circuit FaultbaradaranhamidNo ratings yet
- Visualization of Cavitation in Water TurbinesDocument10 pagesVisualization of Cavitation in Water TurbinesslamienkaNo ratings yet
- 02 Modelling, Parameter Identification, and ControlDocument14 pages02 Modelling, Parameter Identification, and Controlgurudev001No ratings yet
- A Design Method For Cage Induction Motors With Non-Skewed Rotor BarsDocument2 pagesA Design Method For Cage Induction Motors With Non-Skewed Rotor BarsLava KumarNo ratings yet
- IEEE PES 12plsdfa20mcmsamDocument7 pagesIEEE PES 12plsdfa20mcmsamParameswararao BillaNo ratings yet
- Experimental Method: 1. The Wind TunnelDocument7 pagesExperimental Method: 1. The Wind TunnelWalid MohammedNo ratings yet
- Finite Element Analysis of A Synchronous Permanent Magnet Micromotor Through Axisymmetric and Transverse Planar SimulationsDocument4 pagesFinite Element Analysis of A Synchronous Permanent Magnet Micromotor Through Axisymmetric and Transverse Planar Simulationsarnika33No ratings yet
- IEEE Transactions On Power Delivery, Vol. 5, No. 1990: J VBLDocument8 pagesIEEE Transactions On Power Delivery, Vol. 5, No. 1990: J VBLabishek_bhardwa8666No ratings yet
- Transient States Analysis of 3D Transformer Structure: K. Komeza, H. Welfle and S. WiakDocument5 pagesTransient States Analysis of 3D Transformer Structure: K. Komeza, H. Welfle and S. WiakConstantin DorinelNo ratings yet
- Particle Swarm Optimization Based Sliding Mode Control of Variable Speed Wind Energy Conversion SystemDocument11 pagesParticle Swarm Optimization Based Sliding Mode Control of Variable Speed Wind Energy Conversion SystemBukan Syahrul Yasin LimpoNo ratings yet
- Proceedings of The Institution of Mechanical Engineers, Part D - Journal of Automobile Engineering-2008-Neubauer-1141-51Document12 pagesProceedings of The Institution of Mechanical Engineers, Part D - Journal of Automobile Engineering-2008-Neubauer-1141-51neerajhmenonNo ratings yet
- 00asme Maas Schulte FroehlekeDocument16 pages00asme Maas Schulte Froehlekeanoopk222No ratings yet
- Applsci 10 03370Document15 pagesApplsci 10 03370vivek dongareNo ratings yet
- Performing Locked Rotor Test On Squirrel Cage MotorsDocument4 pagesPerforming Locked Rotor Test On Squirrel Cage MotorsK.K. VijayakumarNo ratings yet
- Partial Discharge Diagnosis On Large Power TransformersDocument6 pagesPartial Discharge Diagnosis On Large Power TransformersDiego VidarteNo ratings yet
- JESV5SI0109Document5 pagesJESV5SI0109Kiran YaddanapudiNo ratings yet
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocument5 pagesSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNo ratings yet
- Static Analysis of Mutually Coupled Switched Reluctance Motor With Finite Element MethodDocument5 pagesStatic Analysis of Mutually Coupled Switched Reluctance Motor With Finite Element MethodHeshaM MouhammeDNo ratings yet
- Installation, Calibration and Testing of Low Speed Wind TunnelDocument22 pagesInstallation, Calibration and Testing of Low Speed Wind TunnelRavi Kant100% (1)
- Gear Fault Detection Using The Geometric Properties of Electrical Currents in Three-Phase Induction Motor-Based SystemsDocument12 pagesGear Fault Detection Using The Geometric Properties of Electrical Currents in Three-Phase Induction Motor-Based SystemsydydNo ratings yet
- IEEE Trans Ind Elect FinalDocument14 pagesIEEE Trans Ind Elect Finalivan.vazdar5482No ratings yet
- Direct Torque Control (DTC) in Induction Motor: M.G.MorshadDocument12 pagesDirect Torque Control (DTC) in Induction Motor: M.G.MorshadAdil FarzandNo ratings yet
- Determining Rotor Leakage ReactanceDocument5 pagesDetermining Rotor Leakage ReactanceGaspar RodríguezNo ratings yet
- Decentralized PI/PD Position Control For Active Magnetic BearingsDocument7 pagesDecentralized PI/PD Position Control For Active Magnetic BearingsMuhammadNo ratings yet
- Load AngleDocument8 pagesLoad Anglejosette100% (1)
- Electrical Measuring: Unit 10Document29 pagesElectrical Measuring: Unit 10karnatisharathNo ratings yet
- Baliga Figure of MeritDocument3 pagesBaliga Figure of MeritKyle BotheNo ratings yet
- Ismb 7Document6 pagesIsmb 7Kadhigo YusufNo ratings yet
- Ee8401 - em Ii - Question Bank - Unit1Document4 pagesEe8401 - em Ii - Question Bank - Unit1DEVINo ratings yet
- Sensors: Analysis and Design of A Speed and Position System For Maglev VehiclesDocument18 pagesSensors: Analysis and Design of A Speed and Position System For Maglev VehiclesAnonymous czrvb3hNo ratings yet
- Im Cordinate Csi CNTRLDocument11 pagesIm Cordinate Csi CNTRLsandeepbabu28No ratings yet
- Thrust SensorDocument6 pagesThrust SensorArun Chand C VNo ratings yet
- 2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1Document6 pages2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1ashikhmd4467No ratings yet
- A Study On The Contact Force Between Catenary and PantographDocument6 pagesA Study On The Contact Force Between Catenary and PantographNoir Hamann100% (1)
- ECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPDocument8 pagesECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPNunjaNo ratings yet
- Application of Piezo-Composite ActuatorDocument5 pagesApplication of Piezo-Composite ActuatorPooja SharmaNo ratings yet
- Design and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsDocument12 pagesDesign and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsNicholas ValdezNo ratings yet
- A New Approach To Sensorless Control Method For Brushless DC MotorsDocument23 pagesA New Approach To Sensorless Control Method For Brushless DC Motorsdeepthi056No ratings yet
- Journal of Advanced Mechanical Design, Systems, and ManufacturingDocument8 pagesJournal of Advanced Mechanical Design, Systems, and Manufacturingpravinrock92No ratings yet
- Tech Spec Lca Lga Lha 15 25Document48 pagesTech Spec Lca Lga Lha 15 25Sid ShethNo ratings yet
- IEEE A4 Format-AbstractsDocument1 pageIEEE A4 Format-AbstractsSid ShethNo ratings yet
- Power Optimiser: For Australia Module Add-OnDocument2 pagesPower Optimiser: For Australia Module Add-OnSid ShethNo ratings yet
- Tech Spec Lca Lga Lha 15 25Document48 pagesTech Spec Lca Lga Lha 15 25Sid ShethNo ratings yet
- IEEE Outline FormatDocument3 pagesIEEE Outline FormatAlex HerrmannNo ratings yet
- Automotive EngineeringDocument40 pagesAutomotive EngineeringSid ShethNo ratings yet
- Australian Climate ZonesDocument7 pagesAustralian Climate ZonesSid ShethNo ratings yet
- Australian Climate ZonesDocument7 pagesAustralian Climate ZonesSid ShethNo ratings yet
- Australian Climate ZonesDocument7 pagesAustralian Climate ZonesSid ShethNo ratings yet
- TP 50-340 4Document9 pagesTP 50-340 4Sid ShethNo ratings yet
- NoteDocument1 pageNoteSid ShethNo ratings yet
- Estimation of Electric Charge Output For Piezoelectric Energy Harvesting PDFDocument12 pagesEstimation of Electric Charge Output For Piezoelectric Energy Harvesting PDFSid ShethNo ratings yet
- Hvac July13 003 PT 3Document3 pagesHvac July13 003 PT 3Sid ShethNo ratings yet
- Causes of High RelativeDocument37 pagesCauses of High RelativeSid ShethNo ratings yet
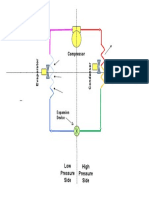
- Vapour CompressionDocument1 pageVapour CompressionSid ShethNo ratings yet
- LECT9 Supplement2 PDFDocument2 pagesLECT9 Supplement2 PDFSid ShethNo ratings yet
- Adaptive Piezoelectric Shunt DampingDocument13 pagesAdaptive Piezoelectric Shunt DampingSid ShethNo ratings yet
- Howell FYP Sem1 2015Document3 pagesHowell FYP Sem1 2015Sid ShethNo ratings yet
- Student Adviser ProgramDocument1 pageStudent Adviser ProgramSid ShethNo ratings yet
- EAT40001 - Unit Outline - Sem 1 2015-New Version PDFDocument10 pagesEAT40001 - Unit Outline - Sem 1 2015-New Version PDFSid ShethNo ratings yet
- Vertical Vibrations of A Vehicle Excited by Real Road Profiles PDFDocument2 pagesVertical Vibrations of A Vehicle Excited by Real Road Profiles PDFSid ShethNo ratings yet
- A New Semi-Active Piezoelectric Based Friction Damper PDFDocument8 pagesA New Semi-Active Piezoelectric Based Friction Damper PDFSid ShethNo ratings yet
- John Mullins Seven Domain Model An OpporDocument6 pagesJohn Mullins Seven Domain Model An OpporSid ShethNo ratings yet
- CHW Thermal Energy StorageDocument17 pagesCHW Thermal Energy StorageSid ShethNo ratings yet
- HMS211 Formula Sheet 17-2-11Document7 pagesHMS211 Formula Sheet 17-2-11Sid ShethNo ratings yet
- Read MeDocument2 pagesRead MeIgor SerraNo ratings yet
- Excel TricksDocument35 pagesExcel TricksSid ShethNo ratings yet
- 048.wireless Water Level ControllerDocument3 pages048.wireless Water Level Controllerpwdsaravanan50% (2)
- Sensor Dan Aktuator 2 PDFDocument392 pagesSensor Dan Aktuator 2 PDFNugrahaNo ratings yet
- Flowserve 520siDocument20 pagesFlowserve 520siNenad MarticNo ratings yet
- BQ 24450Document22 pagesBQ 24450VICTOR MARCOSNo ratings yet
- RBS 6000 Hardware and Configurations GuideDocument71 pagesRBS 6000 Hardware and Configurations GuideAlex Pena100% (3)
- Fanuc Alarm 12 Troubleshooting GuideDocument20 pagesFanuc Alarm 12 Troubleshooting GuidePhong HuynhNo ratings yet
- 100 Questions BrodcastewrDocument15 pages100 Questions BrodcastewrReniel Callo VeracionNo ratings yet
- HiQPdf Evaluation 02/17/2019Document3 pagesHiQPdf Evaluation 02/17/2019lutfiNo ratings yet
- Course Name CO Number With Code Co Statement BT LevelDocument43 pagesCourse Name CO Number With Code Co Statement BT LevelPolkam SrinidhiNo ratings yet
- Data SheetDocument4 pagesData SheetselocaNo ratings yet
- Multistage Transistor Amplifiers Questions and Answers PDFDocument6 pagesMultistage Transistor Amplifiers Questions and Answers PDFBryanOviedoNo ratings yet
- MFJ-854 RF MeterDocument5 pagesMFJ-854 RF MeterHappyJoeNo ratings yet
- B-65425EN - 01 Beta I-B Servomotor, Spindlemotor, Servoamplifier Maintenance ManualDocument174 pagesB-65425EN - 01 Beta I-B Servomotor, Spindlemotor, Servoamplifier Maintenance ManualJesus Alberto RIVERA /CALVEK AUTOMATIONNo ratings yet
- FiltersDocument20 pagesFiltersljjbNo ratings yet
- Agenda Item 65/44 - Analog Electronics SyllabusDocument2 pagesAgenda Item 65/44 - Analog Electronics SyllabusAsmit Anand Singh 21BEE0130No ratings yet
- Compensador TermoparesDocument12 pagesCompensador Termoparesazaelg_5No ratings yet
- PLM01 St7537 App NoteDocument32 pagesPLM01 St7537 App Noteapi-3723964No ratings yet
- Dual Operational Amplifier NJM4560Document4 pagesDual Operational Amplifier NJM4560Félix GNo ratings yet
- DC Servo Motor Control System User ManualDocument35 pagesDC Servo Motor Control System User ManualBayeNo ratings yet
- Ower Er e 7762: 24 Em-Band Linear P Amplifi Modu M5Document5 pagesOwer Er e 7762: 24 Em-Band Linear P Amplifi Modu M5ΑΝΔΡΕΑΣ ΤΣΑΓΚΟΣNo ratings yet
- Lab Manual: 1.NAME: Sujal PranamiDocument28 pagesLab Manual: 1.NAME: Sujal PranamiSujal PranamiNo ratings yet
- Electromagnetic Field Detector Bracelet ArticleDocument5 pagesElectromagnetic Field Detector Bracelet ArticlealejandrabelinkyNo ratings yet
- Transistors and Op-Amps (Ch 13-14Document28 pagesTransistors and Op-Amps (Ch 13-14srinu247100% (3)
- Lab ManualDocument66 pagesLab ManualcommunicationridersNo ratings yet
- Wire Set OPT-1 Reference Guide: HT-3 H/LDocument9 pagesWire Set OPT-1 Reference Guide: HT-3 H/LJoão Pedro AlmeidaNo ratings yet
- AM Transmitter'n'receiver CircuitDocument9 pagesAM Transmitter'n'receiver Circuitkapil singh100% (1)
- Wideband Pass Filter With OP Amplifier: I (Section 1)Document2 pagesWideband Pass Filter With OP Amplifier: I (Section 1)Benj MendozaNo ratings yet
- Lab 4 - Differentiator & IntegratorDocument14 pagesLab 4 - Differentiator & IntegratorVickneswaran KalerwananNo ratings yet
- Power Amplifiers Reference English Issue 2BDocument16 pagesPower Amplifiers Reference English Issue 2BGoran Ristic-RileNo ratings yet
- PRINCIPLES OF COMMUNICATIONS: TRANSMITTER DESIGN AND MODULATION TECHNIQUESDocument37 pagesPRINCIPLES OF COMMUNICATIONS: TRANSMITTER DESIGN AND MODULATION TECHNIQUESUMEESSNo ratings yet