You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- An SAP BW DSO Stands For Data Store Object and Was Previously Called An ODS Which Stands For Operational Data StoreDocument3 pagesAn SAP BW DSO Stands For Data Store Object and Was Previously Called An ODS Which Stands For Operational Data StorekopikoNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Dilger Lustre HPCS May WorkshopDocument45 pagesDilger Lustre HPCS May WorkshopSebastian GutierrezNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Mca Jntu-Anantapur SyllabusDocument124 pagesMca Jntu-Anantapur Syllabusyugandhar004No ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Chapter 11-PCP-2oP PDFDocument25 pagesChapter 11-PCP-2oP PDFBalkrishan GoswamiNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Answer All Questions PART A - (5 2 10)Document2 pagesAnswer All Questions PART A - (5 2 10)Anonymous NV7nnJDeNo ratings yet
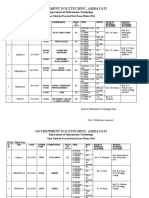
- Government Polytechnic, Amravati: Department of Information TechnologyDocument23 pagesGovernment Polytechnic, Amravati: Department of Information Technologyswapnil kaleNo ratings yet
- Lecture For Adobe PhotoshopDocument6 pagesLecture For Adobe PhotoshopEunice NemenzoNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Transfer Rules and Update RulesDocument4 pagesTransfer Rules and Update RulesreggiehifiNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- XG1.2 BrochureDocument6 pagesXG1.2 BrochureSholl1No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Jjwdesign Google Maps: Sugarcrm Module Frequently Asked QuestionsDocument4 pagesJjwdesign Google Maps: Sugarcrm Module Frequently Asked QuestionsGuillermo ScarelloNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Blue Elf Ver II ManualDocument5 pagesBlue Elf Ver II ManualMarcelo GonçalavesNo ratings yet
- Data Representation: F.G Boys High School R.A Bazar Rawalpindi CanttDocument81 pagesData Representation: F.G Boys High School R.A Bazar Rawalpindi CanttMuhammad Bilal IqbalNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Contoh Program ScannerDocument6 pagesContoh Program ScannerEkoNurdiyantoNo ratings yet
- SM7 Incident Management-Tables, Metadata, ObjectsDocument32 pagesSM7 Incident Management-Tables, Metadata, Objectsneha100% (2)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- PRAVEEN KUMAR HP Customer Support EngineerDocument3 pagesPRAVEEN KUMAR HP Customer Support EngineerPraveen Jai0% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- QMS Awareness TrainingDocument25 pagesQMS Awareness Trainingsemeneh haileNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- LusidOSC v1 0Document7 pagesLusidOSC v1 0Atthaboon SanurtNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Abcs of ErpDocument17 pagesThe Abcs of ErppohilabandhuNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Taxonomy of BugsDocument11 pagesTaxonomy of BugsrmvigneshmuraliNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 2performant Terms of Services, Privacy Policy and Data Processing Appendix As Joint ControllerDocument20 pages2performant Terms of Services, Privacy Policy and Data Processing Appendix As Joint ControllerGabitaGabitaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- AggRAM Op Man D6500094D PDFDocument108 pagesAggRAM Op Man D6500094D PDFDewi ArisandyNo ratings yet
- Anna University MBA - All Year, Semester Syllabus Ordered Lecture Notes and Study Material For College StudentsDocument69 pagesAnna University MBA - All Year, Semester Syllabus Ordered Lecture Notes and Study Material For College StudentsM.V. TVNo ratings yet
- Group 14 Project ReportDocument25 pagesGroup 14 Project ReportRaza khanNo ratings yet
- RxNorm's Drug Interface Terminology Supports InteroperabilityDocument4 pagesRxNorm's Drug Interface Terminology Supports InteroperabilityimomedicalNo ratings yet
- 70 445Document81 pages70 445Ravi VarmaNo ratings yet
- Adobe Photoshop Multiple-Choice Questions (MCQS)Document31 pagesAdobe Photoshop Multiple-Choice Questions (MCQS)Harshal ThakurNo ratings yet
- Control Account in Oracle R12Document11 pagesControl Account in Oracle R12sgirishri4044No ratings yet
- Etap User Guide PDFDocument2 pagesEtap User Guide PDFHarry100% (1)
- Marcel Dadi - Fingers Crossing PDFDocument82 pagesMarcel Dadi - Fingers Crossing PDFangorita LoboLoco100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Dewhurst C Common Knowledge Essential Intermediate ProgrammingDocument184 pagesDewhurst C Common Knowledge Essential Intermediate ProgrammingLeo ValentineNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)