You might also like
- Engineering Plasticity: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionFrom EverandEngineering Plasticity: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNo ratings yet
- Best Practice Srs Menter 2015Document75 pagesBest Practice Srs Menter 2015ohpmynNo ratings yet
- Radiative Heat Transfer ProblemsDocument10 pagesRadiative Heat Transfer Problemseldwin_dj7216No ratings yet
- Fiber Bragg GratingsDocument31 pagesFiber Bragg GratingsFranklin JiménezNo ratings yet
- Dem With LiggghtsDocument89 pagesDem With LiggghtsAnonymous llav2JNo ratings yet
- Freudenberg - A New Elastic-Plastic Material Model With Non-Linear Elastic Behaviour For Thermoplastic PDFDocument11 pagesFreudenberg - A New Elastic-Plastic Material Model With Non-Linear Elastic Behaviour For Thermoplastic PDFsvk_ntNo ratings yet
- Engineers Guide To DropsizeDocument15 pagesEngineers Guide To DropsizeArmin Mora Gonzalez100% (1)
- Ansys TheoryDocument1,266 pagesAnsys TheoryDragos Andrei100% (2)
- Manual CFDDocument43 pagesManual CFDuchiiha_cami100% (1)
- Mfix MPPIC Doc PDFDocument20 pagesMfix MPPIC Doc PDFMuhammad Adnan LaghariNo ratings yet
- Gas Kinetic TheoryDocument311 pagesGas Kinetic Theoryrestlaim100% (1)
- Formulation of The Finite Element Method Linear Analysis in Solid and Structural MechanicsDocument190 pagesFormulation of The Finite Element Method Linear Analysis in Solid and Structural MechanicsRamesh Prabhakar100% (1)
- Moving Wall Fluent TutorialDocument107 pagesMoving Wall Fluent TutorialZahoor Hussain Rana100% (2)
- Finite Difference MethodDocument51 pagesFinite Difference MethodMEET PATELNo ratings yet
- Ansys Fluid Dynamics Verification ManualDocument226 pagesAnsys Fluid Dynamics Verification ManualVinay Kusumanchi100% (2)
- ANSYS Fluent Theory Guide PDFDocument850 pagesANSYS Fluent Theory Guide PDFermautino865880% (5)
- OpenFoam WorkshopDocument16 pagesOpenFoam WorkshopMonssif NajimNo ratings yet
- Mesh CFDDocument65 pagesMesh CFDPankaj GuptaNo ratings yet
- D Lovett (Author) - Tensor Properties of Crystals-CRC Press (1989)Document181 pagesD Lovett (Author) - Tensor Properties of Crystals-CRC Press (1989)林丗育No ratings yet
- Tensor AnalysisDocument29 pagesTensor AnalysisPugazhenthi Thananjayan100% (2)
- Incompressible Fluid DynamicsDocument241 pagesIncompressible Fluid DynamicsYin HangNo ratings yet
- J.B. Institute of Engineering and Technology: Course Code: C322 Finite Element MethodDocument82 pagesJ.B. Institute of Engineering and Technology: Course Code: C322 Finite Element MethodGopinath GangadhariNo ratings yet
- Introduction To Computational PlasticityDocument51 pagesIntroduction To Computational PlasticityLucas PrataNo ratings yet
- Advanced Engineering Fluid Mechanics - K. Muralidhar and G. BiswasDocument20 pagesAdvanced Engineering Fluid Mechanics - K. Muralidhar and G. BiswasAli Adnan100% (1)
- Permanent Deformation Model Using Creep in AbaqusDocument326 pagesPermanent Deformation Model Using Creep in AbaqusChristopher Gaines100% (1)
- Finite Volume MethodDocument15 pagesFinite Volume MethodJon Bisu DebnathNo ratings yet
- Abaqus Tensile Thesis PDFDocument61 pagesAbaqus Tensile Thesis PDFDeniz AktaşNo ratings yet
- DEM Simulation of Flow of Granular Particles On An Inclined Plane in LIGGGHTSDocument49 pagesDEM Simulation of Flow of Granular Particles On An Inclined Plane in LIGGGHTSBharat BajajNo ratings yet
- Closure Strategies For Turbulent and Transitional FlowsDocument770 pagesClosure Strategies For Turbulent and Transitional FlowsGutierrez Hugo100% (3)
- CHF LUT 2006 Lookup TableDocument14 pagesCHF LUT 2006 Lookup Tablefaisal58650No ratings yet
- Composite Modeling White Paper 2014 Rev-0-ReadDocument66 pagesComposite Modeling White Paper 2014 Rev-0-ReadTrexa GyreueNo ratings yet
- Solving Dynamics Problems in Mathcad: Brian D. HarperDocument142 pagesSolving Dynamics Problems in Mathcad: Brian D. HarperErdoan MustafovNo ratings yet
- Tension and Torsion TestsDocument19 pagesTension and Torsion Testsyeast taeNo ratings yet
- Liggghts Installation Guide 180204145706Document10 pagesLiggghts Installation Guide 180204145706Vinicius GonçalvesNo ratings yet
- Implementation of Level Set Method Based On OpenFOAM For Capturing The Free Interface in in Compressible Fluid FlowsDocument10 pagesImplementation of Level Set Method Based On OpenFOAM For Capturing The Free Interface in in Compressible Fluid FlowsAghajaniNo ratings yet
- Finite Element For Heat Transfer: AnalysisDocument204 pagesFinite Element For Heat Transfer: Analysisvigia41100% (1)
- Simulation and Modelimg of Turbulent Flows - Lumley J.L.Document329 pagesSimulation and Modelimg of Turbulent Flows - Lumley J.L.vsammartanoNo ratings yet
- (Ebook - PDF) - CFD - FluentDocument12 pages(Ebook - PDF) - CFD - FluentMilasinovic Marko0% (1)
- Fulltext01 Matlab Code For Elasticity y Plasticity PDFDocument115 pagesFulltext01 Matlab Code For Elasticity y Plasticity PDFRory Cristian Cordero RojoNo ratings yet
- Penetration of A Shaped Charge PDFDocument253 pagesPenetration of A Shaped Charge PDFGkcDedeNo ratings yet
- Fuel Cells Module ManualDocument85 pagesFuel Cells Module ManualstarofdseaNo ratings yet
- Galerkin MethodDocument24 pagesGalerkin MethodanpyaaNo ratings yet
- Dripping Faucet OriginalPaperDocument33 pagesDripping Faucet OriginalPaperDiomar Cesar LobãoNo ratings yet
- Appendix A: Piezoelectric Constitutive EquationsDocument6 pagesAppendix A: Piezoelectric Constitutive EquationsAniruddh FaujdarNo ratings yet
- BoundaryConditions Of41Document133 pagesBoundaryConditions Of41Marco Bernardes100% (1)
- Design of A Supersonic NozzleDocument39 pagesDesign of A Supersonic NozzlePandel0% (1)
- Methods For VortexDocument46 pagesMethods For VortexQuike Flores SuárezNo ratings yet
- Two Phase Fluid MechanicsDocument35 pagesTwo Phase Fluid MechanicsKingsley Etornam AnkuNo ratings yet
- Differential Quadrature and Differential Quadrature Based Element Methods: Theory and ApplicationsFrom EverandDifferential Quadrature and Differential Quadrature Based Element Methods: Theory and ApplicationsNo ratings yet
- The Spectra and Dynamics of Diatomic Molecules: Revised and Enlarged EditionFrom EverandThe Spectra and Dynamics of Diatomic Molecules: Revised and Enlarged EditionNo ratings yet
- 유체역학 강의노트Document160 pages유체역학 강의노트배석우No ratings yet
- Deterministic Numerical Simulation of The Boltzmann and Kinetic Model Equations For Classical and Quantum Dilute GasesDocument170 pagesDeterministic Numerical Simulation of The Boltzmann and Kinetic Model Equations For Classical and Quantum Dilute Gasesxzy105785454No ratings yet
- Applications of Quantum and Classical Connections in Modeling Atomic, Molecular and Electrodynamic SystemsFrom EverandApplications of Quantum and Classical Connections in Modeling Atomic, Molecular and Electrodynamic SystemsNo ratings yet
- Quantum Physics: The Bottom-Up ApproachDocument270 pagesQuantum Physics: The Bottom-Up ApproachAvanish KumarNo ratings yet
- Webber, Cooper. Theoretical Physics 2 (Quantum Theory) Lecture Notes (Cambridge, 2004) (184s) PDFDocument184 pagesWebber, Cooper. Theoretical Physics 2 (Quantum Theory) Lecture Notes (Cambridge, 2004) (184s) PDFMark Alexander Ruiz100% (1)
- FINAL e Theis For e Prints Ramli 25843141Document233 pagesFINAL e Theis For e Prints Ramli 25843141ning.anNo ratings yet
- Understanding Quantum Measurement From The Solution of Dynamical Models - Armen E. Allahverdyan, Roger Balian, Theo M. Nieuwenhuizen - 1107.2138v4Document201 pagesUnderstanding Quantum Measurement From The Solution of Dynamical Models - Armen E. Allahverdyan, Roger Balian, Theo M. Nieuwenhuizen - 1107.2138v4dagush100% (1)
- Emanuele Alesci - Complete Loop Quantum Gravity Graviton PropagatorDocument196 pagesEmanuele Alesci - Complete Loop Quantum Gravity Graviton PropagatorArsLexiiNo ratings yet
- Henrik Rusche PHD 2002Document343 pagesHenrik Rusche PHD 2002007kruno100% (1)
- OBJ Datastream PDFDocument238 pagesOBJ Datastream PDFAliNo ratings yet
- Heat Transfer Boundary ConditionsDocument14 pagesHeat Transfer Boundary ConditionschawarepNo ratings yet
- Electrical Analogy of Heat TransferDocument28 pagesElectrical Analogy of Heat TransferchawarepNo ratings yet
- Electrical Analogy of Heat TransferDocument28 pagesElectrical Analogy of Heat TransferchawarepNo ratings yet
- Cat Adoption FormDocument2 pagesCat Adoption FormchawarepNo ratings yet
- Heat ExchangerDocument23 pagesHeat ExchangerchawarepNo ratings yet
- Tutorial HT 1Document2 pagesTutorial HT 1chawarepNo ratings yet
- Heat Transfer Conduction TutorialDocument2 pagesHeat Transfer Conduction TutorialchawarepNo ratings yet
- इ.६ वी सराव अभ्यासपुस्तिका २०२१-२२Document28 pagesइ.६ वी सराव अभ्यासपुस्तिका २०२१-२२chawarepNo ratings yet
- Fluent-Intro 14.5 L03 Turbulence&HeatTransfer&Transient PDFDocument72 pagesFluent-Intro 14.5 L03 Turbulence&HeatTransfer&Transient PDFWedye BagonkNo ratings yet
- (Reference: Hazel and Baillie, 1998)Document2 pages(Reference: Hazel and Baillie, 1998)chawarepNo ratings yet
- Heat Transfer Through Extended SurfacesDocument16 pagesHeat Transfer Through Extended SurfaceschawarepNo ratings yet
- NaturalDocument1 pageNaturalchawarepNo ratings yet
- Fluent 13.0 Lecture07 Heat TransferDocument33 pagesFluent 13.0 Lecture07 Heat Transfershraveen1991No ratings yet
- MECH Final YearDocument25 pagesMECH Final YearchawarepNo ratings yet
- Virtual Tour - Two Weeks Online Workshop On Advanced CFD For Industrial ApplicationsDocument5 pagesVirtual Tour - Two Weeks Online Workshop On Advanced CFD For Industrial ApplicationschawarepNo ratings yet
- Shridasbodh Adhyayan Question PapersDocument32 pagesShridasbodh Adhyayan Question PaperschawarepNo ratings yet
- Design of Eductor PumpDocument14 pagesDesign of Eductor PumpchawarepNo ratings yet
- Dasbodh Pravesh Pustika Complete March 2017Document88 pagesDasbodh Pravesh Pustika Complete March 2017halbesNo ratings yet
- Katha Sheela Smarak BookDocument58 pagesKatha Sheela Smarak Bookchawarep100% (1)
- Letter of RecommendationDocument2 pagesLetter of RecommendationchawarepNo ratings yet
- AttendanceDocument17 pagesAttendancechawarepNo ratings yet
- Shridasbodh Parichay BhavarthDocument159 pagesShridasbodh Parichay BhavarthchawarepNo ratings yet
- Gas Turbine ProblemsDocument6 pagesGas Turbine ProblemschawarepNo ratings yet
- Aerodynamic Considerations of Blended Wing Body AircraftDocument23 pagesAerodynamic Considerations of Blended Wing Body AircraftchawarepNo ratings yet
- Slug Flow Through Horizontal PipesDocument7 pagesSlug Flow Through Horizontal PipeschawarepNo ratings yet
- Gas Turbine ProblemsDocument6 pagesGas Turbine ProblemschawarepNo ratings yet
- Turbo Machines NotesDocument79 pagesTurbo Machines NoteschawarepNo ratings yet
- Kaplan Turbine NumericalsDocument10 pagesKaplan Turbine NumericalschawarepNo ratings yet
- Gas Turbine 3-5Document9 pagesGas Turbine 3-5chawarepNo ratings yet
- Pune University MA - 2013 Pattern Economics Question PapersDocument15 pagesPune University MA - 2013 Pattern Economics Question PaperschawarepNo ratings yet
- 015-Method Statement For Painting Works (Building) PDFDocument21 pages015-Method Statement For Painting Works (Building) PDFKöksal Patan86% (21)
- 2935 9720 02 enDocument8 pages2935 9720 02 enemai2012No ratings yet
- 1964 US Army Vietnam War Military Police Traffic Control 203pDocument202 pages1964 US Army Vietnam War Military Police Traffic Control 203pwwwsurvivalebookscom100% (1)
- Transmission - Approved List 26-09-2017Document554 pagesTransmission - Approved List 26-09-2017bkhNo ratings yet
- Structured Text CheatsheetDocument1 pageStructured Text CheatsheetMauricio Rodriguez0% (1)
- Isolation Selector GuideDocument12 pagesIsolation Selector GuidesandeepbhallaNo ratings yet
- IntegratingBIMTechnologyintoLA (2014) PDFDocument115 pagesIntegratingBIMTechnologyintoLA (2014) PDFArnaldo RuizNo ratings yet
- Q - Bae146 Inventory - SSS-Jan 2010Document6 pagesQ - Bae146 Inventory - SSS-Jan 2010sssavNo ratings yet
- DSV SVDocument1 pageDSV SVPUNITHA KUMARNo ratings yet
- Intro To Neutron ScatteringDocument191 pagesIntro To Neutron ScatteringEleni MitsiNo ratings yet
- Bioreactor Design: Mata Kuliah: Pengantar Teknologi BioprosesDocument33 pagesBioreactor Design: Mata Kuliah: Pengantar Teknologi BioprosesyassinharanNo ratings yet
- General Sir John Kotelawala Defence University: Application For A Detailed Degree Certificate/TranscriptDocument3 pagesGeneral Sir John Kotelawala Defence University: Application For A Detailed Degree Certificate/TranscriptNatasha de SilvaNo ratings yet
- Design CalculationDocument13 pagesDesign CalculationSunil KumarNo ratings yet
- Ipod Shuffle: User GuideDocument32 pagesIpod Shuffle: User GuidekennethNo ratings yet
- MK Conveyor Technology 5.0Document484 pagesMK Conveyor Technology 5.0Samuel Getaneh TNo ratings yet
- 20e - cTI-60t - TI Pin Converter: Blackhawk™ Jtag Pin ConvertersDocument2 pages20e - cTI-60t - TI Pin Converter: Blackhawk™ Jtag Pin ConvertersvspuriNo ratings yet
- Quick Reference Guide OptiPoint 500 FamilyDocument92 pagesQuick Reference Guide OptiPoint 500 FamilyAlvaro ManjarresNo ratings yet
- Introduction To Igor Programming PDFDocument33 pagesIntroduction To Igor Programming PDFpaulklyuyevNo ratings yet
- NAME Dendi Panji Nugraha: Career ExperiencesDocument4 pagesNAME Dendi Panji Nugraha: Career ExperiencesAsep Ricky HerdiansyahNo ratings yet
- Depth Semantic SegmentDocument9 pagesDepth Semantic SegmentAivan Dredd PunzalanNo ratings yet
- WG1AR5 Chapter08 FINAL PDFDocument82 pagesWG1AR5 Chapter08 FINAL PDFMariel YarrodNo ratings yet
- Review On Development of Polypropylene Manufacturing ProcessDocument11 pagesReview On Development of Polypropylene Manufacturing ProcessShweta Yadav100% (1)
- J Fluids Engineering 2009 Vol 131 N4Document120 pagesJ Fluids Engineering 2009 Vol 131 N4Нильва АлександрNo ratings yet
- Bulk CollectDocument5 pagesBulk CollectAbhishekNo ratings yet
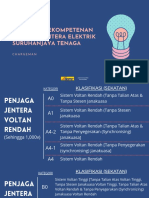
- Kategori Kompeten Penjaga Jentera Elektrik STDocument9 pagesKategori Kompeten Penjaga Jentera Elektrik STAbun ParadoxsNo ratings yet
- InteliMains 210 MC - Global Guide PDFDocument637 pagesInteliMains 210 MC - Global Guide PDFHakim GOURAIANo ratings yet
- OGC-FIC-004-I-Cable Insulation Resistance-Field Installation ChecklistDocument2 pagesOGC-FIC-004-I-Cable Insulation Resistance-Field Installation ChecklistTaylorNo ratings yet
- Cs Acrovyn CatalogueDocument83 pagesCs Acrovyn CatalogueBoboc AndreiNo ratings yet
- Cs6212 Programming and Data Structures Laboratory I Laboratory ManualDocument28 pagesCs6212 Programming and Data Structures Laboratory I Laboratory Manualprasath_676303No ratings yet
- Bowmar MX55 Electronic Calculator ManualDocument22 pagesBowmar MX55 Electronic Calculator ManualDjango RodNo ratings yet