You might also like
- Goal ProgrammingDocument9 pagesGoal ProgrammingAashrith ParvathaneniNo ratings yet
- Computational Geometry: Exploring Geometric Insights for Computer VisionFrom EverandComputational Geometry: Exploring Geometric Insights for Computer VisionNo ratings yet
- Ot MCQ 3Document13 pagesOt MCQ 3shuklaprakhar1858No ratings yet
- Application of Linear Programming For Solving Fuzzy Transportation ProblemsDocument16 pagesApplication of Linear Programming For Solving Fuzzy Transportation ProblemsDang AntheaNo ratings yet
- On-Resolution of Transportation Issues in Fuzzy Environment Exploitation Ranking FunctionDocument6 pagesOn-Resolution of Transportation Issues in Fuzzy Environment Exploitation Ranking FunctionTJPRC PublicationsNo ratings yet
- Chance Constrained Quadratic Bi-Level Programming Problem: Surapati Pramanik, Durga BanerjeeDocument8 pagesChance Constrained Quadratic Bi-Level Programming Problem: Surapati Pramanik, Durga BanerjeeIJMERNo ratings yet
- A Genetic Algorithm For Linear Programming With Fuzzy ConstraintsDocument17 pagesA Genetic Algorithm For Linear Programming With Fuzzy Constraintsad_mih7867No ratings yet
- New Row Maxima Method To Solve Multi-Objective Transportation Problem Under Fuzzy Conditions A. J. Khan and D. K. Das Volume - 1, Number - 1 Publication Year: 2012, Page(s) : 42 - 46Document5 pagesNew Row Maxima Method To Solve Multi-Objective Transportation Problem Under Fuzzy Conditions A. J. Khan and D. K. Das Volume - 1, Number - 1 Publication Year: 2012, Page(s) : 42 - 46International Journal of Creative Mathematical Sciences and Technology100% (1)
- Effect of Graphical Method For Solving - Mathematical Programming ProblemDocument8 pagesEffect of Graphical Method For Solving - Mathematical Programming ProblemHans TohaNo ratings yet
- Robust Bi-Objective Shortest Path Problem in Real Road NetworksDocument9 pagesRobust Bi-Objective Shortest Path Problem in Real Road NetworksmrjockeyNo ratings yet
- 229 393 1 PBDocument6 pages229 393 1 PBLakshya SinghalNo ratings yet
- Prabhu-Fuzzy Hungarian Method For Solving Assignment Problem Involving Trapezoidal Fuzzy NumbersDocument8 pagesPrabhu-Fuzzy Hungarian Method For Solving Assignment Problem Involving Trapezoidal Fuzzy NumbersGanesan KandasamyNo ratings yet
- L-Shaped Decomposition of Two-Stage Stochastic Programs With Integer RecourseDocument14 pagesL-Shaped Decomposition of Two-Stage Stochastic Programs With Integer RecoursearmiknkNo ratings yet
- CHAPTER 6 System Techniques in Water Resuorce PPT YadesaDocument32 pagesCHAPTER 6 System Techniques in Water Resuorce PPT YadesaGod is good tubeNo ratings yet
- Penalty Function Method For Solving Fuzzy Nonlinear Programming Problem-33 PDFDocument13 pagesPenalty Function Method For Solving Fuzzy Nonlinear Programming Problem-33 PDFRussell JacobNo ratings yet
- Data Structures and Algorithms: Unit - Iii SnapshotsDocument34 pagesData Structures and Algorithms: Unit - Iii SnapshotsJit AggNo ratings yet
- Fuzzy Transportation ProblemDocument7 pagesFuzzy Transportation Problemsubha lakshmiNo ratings yet
- Solving Nonlinear Programming Problem in Fuzzy EnvironmentDocument12 pagesSolving Nonlinear Programming Problem in Fuzzy EnvironmentDian AbiyogaNo ratings yet
- Linear ProgrammingDocument54 pagesLinear ProgrammingkatsandeNo ratings yet
- 2A-FEM-Gaussian Quadrature RuleDocument9 pages2A-FEM-Gaussian Quadrature RulerasprasadNo ratings yet
- LPPDocument8 pagesLPPshinde_jayesh2005No ratings yet
- Quntiative Techniques 2 SonuDocument11 pagesQuntiative Techniques 2 SonuSonu KumarNo ratings yet
- Asian Journal of Current Engineering and Maths Solving Transportation Problem With The Various Method of Linear ..Document4 pagesAsian Journal of Current Engineering and Maths Solving Transportation Problem With The Various Method of Linear ..Joezerk CarpioNo ratings yet
- Fuz2Y: The Relationship Between Goal Programming and Fuzzy ProgrammingDocument8 pagesFuz2Y: The Relationship Between Goal Programming and Fuzzy ProgrammingMaid OmerovicNo ratings yet
- Vol10 Iss4 258-265 Ones Assignment Method For SolvingDocument8 pagesVol10 Iss4 258-265 Ones Assignment Method For Solvinggopi_dey8649No ratings yet
- Benders DecompositionDocument15 pagesBenders Decompositionvino154023No ratings yet
- Introduction To Linear ProgrammingDocument10 pagesIntroduction To Linear ProgrammingMomin SuburNo ratings yet
- A Scaled Gradient Projection Method For Constrained Image DeblurringDocument28 pagesA Scaled Gradient Projection Method For Constrained Image DeblurringBogdan PopaNo ratings yet
- MTH601-11 KalDocument74 pagesMTH601-11 Kalzaheer asghar83% (6)
- Aggregate Production Planning Using FLPDocument16 pagesAggregate Production Planning Using FLPSei LaNo ratings yet
- Yujorn72p45 57Document13 pagesYujorn72p45 57Lusi liturgiaNo ratings yet
- Computational Method For Fuzzy Arithmetic OperationsDocument5 pagesComputational Method For Fuzzy Arithmetic OperationsMd QutubuddinNo ratings yet
- Linear and Multiobjective Programming With Fuzzy Stochastic ExtensionsDocument103 pagesLinear and Multiobjective Programming With Fuzzy Stochastic ExtensionsKharolin MauNo ratings yet
- TP ApDocument109 pagesTP Apmat19 1372No ratings yet
- AOT - Lecture Notes V1Document5 pagesAOT - Lecture Notes V1S Deva PrasadNo ratings yet
- Application of Cutting Stock Problem inDocument6 pagesApplication of Cutting Stock Problem inBanda SamsonNo ratings yet
- Leclin 11Document42 pagesLeclin 11chotakamal3625No ratings yet
- 50-Article Text-92-1-10-20191212Document9 pages50-Article Text-92-1-10-20191212dinesh911No ratings yet
- International Journal of Engineering Research and Development (IJERD)Document7 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Nonlinear Programming: Applicability Possible Types of Constraint Set Methods For Solving The Problem ExamplesDocument4 pagesNonlinear Programming: Applicability Possible Types of Constraint Set Methods For Solving The Problem ExamplesLewis SitorusNo ratings yet
- Branch and Bound Algorithms - Principles and ExamplesDocument30 pagesBranch and Bound Algorithms - Principles and Examplessaeed-21No ratings yet
- Linear Programme-Simplex and Graphical PDFDocument34 pagesLinear Programme-Simplex and Graphical PDFRayan Rodrigues100% (1)
- López Reyes, DanaeDocument55 pagesLópez Reyes, DanaeAbraham TQNo ratings yet
- Dual Coordinate Descent Methods For Logistic Regression and Maximum Entropy ModelsDocument34 pagesDual Coordinate Descent Methods For Logistic Regression and Maximum Entropy ModelsHiền TrầnNo ratings yet
- A Computational Method For Solving Two Point Boundary Value Problems of Order FourDocument6 pagesA Computational Method For Solving Two Point Boundary Value Problems of Order FourNguyenNgocNo ratings yet
- Penalty Method For Fuzzy Linear Programming With Trapezoidal NumbersDocument8 pagesPenalty Method For Fuzzy Linear Programming With Trapezoidal Numbersad_mih7867No ratings yet
- AEM Unit 3Document6 pagesAEM Unit 3Jaya KumariNo ratings yet
- Daa Unit 3Document22 pagesDaa Unit 3Rahul GusainNo ratings yet
- M.Sc. Course in Applied Mathematics With Oceanology and Computer Programming Semester-IV Paper-MTM402 Unit-1Document26 pagesM.Sc. Course in Applied Mathematics With Oceanology and Computer Programming Semester-IV Paper-MTM402 Unit-1Avijit SamantaNo ratings yet
- Chapter-4 AP - FormattedDocument25 pagesChapter-4 AP - FormattedMaxy GiuliNo ratings yet
- Cs6402 DAA Notes (Unit-3)Document25 pagesCs6402 DAA Notes (Unit-3)Jayakumar DNo ratings yet
- 20-2021-A Dual Scheme For Solving Linear Countable Semi-InDocument14 pages20-2021-A Dual Scheme For Solving Linear Countable Semi-InBang Bang NgNo ratings yet
- LP Methods.S4 Interior Point MethodsDocument17 pagesLP Methods.S4 Interior Point MethodsnkapreNo ratings yet
- Convexoptmizationincommunications 150911150314 Lva1 App6892Document29 pagesConvexoptmizationincommunications 150911150314 Lva1 App6892Moheddin SumagayanNo ratings yet
- Alberty-Matlab Implementation of Fem in ElasticityDocument25 pagesAlberty-Matlab Implementation of Fem in ElasticityRick HunterNo ratings yet
- Ada Module 3 NotesDocument40 pagesAda Module 3 NotesLokko PrinceNo ratings yet
- ML Practical Journal With WriteupsDocument46 pagesML Practical Journal With Writeupssakshi mishraNo ratings yet
- M1L3 LNDocument7 pagesM1L3 LNnagesha_basappa865No ratings yet
- A Method For Ranking of Fuzzy Numbers Using New Area Method: January 2015Document12 pagesA Method For Ranking of Fuzzy Numbers Using New Area Method: January 2015Hiro SigmaNo ratings yet
- Goal ProgrammingDocument7 pagesGoal ProgrammingAashrith ParvathaneniNo ratings yet
- Integer and Goal ProgrammingDocument33 pagesInteger and Goal ProgrammingAashrith Parvathaneni100% (1)
- SOPDocument2 pagesSOPAashrith ParvathaneniNo ratings yet
- Goal ProgrammingDocument386 pagesGoal ProgrammingAashrith ParvathaneniNo ratings yet
- Goal Programming ModelDocument43 pagesGoal Programming ModelAashrith ParvathaneniNo ratings yet
- Goal ProgrammingDocument35 pagesGoal ProgrammingAashrith ParvathaneniNo ratings yet
- Goal ProgrammingDocument37 pagesGoal ProgrammingAashrith ParvathaneniNo ratings yet
- Integer Programming, Goal Programming, and Nonlinear ProgrammingDocument54 pagesInteger Programming, Goal Programming, and Nonlinear ProgrammingAashrith ParvathaneniNo ratings yet
- Introduction To Management Science 8th Edition by Bernard W. Taylor IIIDocument58 pagesIntroduction To Management Science 8th Edition by Bernard W. Taylor IIIAashrith ParvathaneniNo ratings yet
- Goal ProgrammingDocument12 pagesGoal ProgrammingAashrith ParvathaneniNo ratings yet
- Goal ProgrammingDocument12 pagesGoal ProgrammingAashrith ParvathaneniNo ratings yet
- A Multilevel Integrative Approach To Hospital Case Mix and Capacity PlanningDocument34 pagesA Multilevel Integrative Approach To Hospital Case Mix and Capacity PlanningAashrith ParvathaneniNo ratings yet
- Goal Programming Using Excel SolverDocument12 pagesGoal Programming Using Excel SolverAashrith ParvathaneniNo ratings yet
- Manufacturing Technology III 2006-07 Page-IIDocument1 pageManufacturing Technology III 2006-07 Page-IIAashrith ParvathaneniNo ratings yet
- Goal Programming PresentationsDocument26 pagesGoal Programming PresentationsAashrith ParvathaneniNo ratings yet
- CH 9Document33 pagesCH 908bch022No ratings yet
- Spreadsheet Modeling & Decision Analysis: A Practical Introduction To Management ScienceDocument34 pagesSpreadsheet Modeling & Decision Analysis: A Practical Introduction To Management ScienceAashrith ParvathaneniNo ratings yet
- Mechanical Engineering 2Document28 pagesMechanical Engineering 2Aashrith ParvathaneniNo ratings yet
- Mechanical Engineering 2Document28 pagesMechanical Engineering 2Aashrith ParvathaneniNo ratings yet
- Nanotechnology in CosmeticsDocument2 pagesNanotechnology in CosmeticsAashrith ParvathaneniNo ratings yet
- Mechanical Engineering - 1 PDFDocument24 pagesMechanical Engineering - 1 PDFmadhurautoNo ratings yet
- Telugu (Literature) 1Document4 pagesTelugu (Literature) 1Aashrith ParvathaneniNo ratings yet
- Fusion Implementing Offerings Using Functional Setup Manager PDFDocument51 pagesFusion Implementing Offerings Using Functional Setup Manager PDFSrinivasa Rao Asuru0% (1)
- Huawei R4815N1 DatasheetDocument2 pagesHuawei R4815N1 DatasheetBysNo ratings yet
- IEC ShipsDocument6 pagesIEC ShipsdimitaringNo ratings yet
- CH 1 - Democracy and American PoliticsDocument9 pagesCH 1 - Democracy and American PoliticsAndrew Philip ClarkNo ratings yet
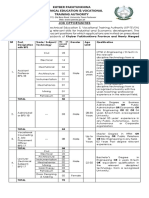
- KP Tevta Advertisement 16-09-2019Document4 pagesKP Tevta Advertisement 16-09-2019Ishaq AminNo ratings yet
- IMS Objectives Targets 2Document2 pagesIMS Objectives Targets 2FaridUddin Ahmed100% (3)
- 2SB817 - 2SD1047 PDFDocument4 pages2SB817 - 2SD1047 PDFisaiasvaNo ratings yet
- Tetralogy of FallotDocument8 pagesTetralogy of FallotHillary Faye FernandezNo ratings yet
- WL-80 FTCDocument5 pagesWL-80 FTCMr.Thawatchai hansuwanNo ratings yet
- Costbenefit Analysis 2015Document459 pagesCostbenefit Analysis 2015TRÂM NGUYỄN THỊ BÍCHNo ratings yet
- Law of EvidenceDocument14 pagesLaw of EvidenceIsha ChavanNo ratings yet
- Recommendations For Students With High Functioning AutismDocument7 pagesRecommendations For Students With High Functioning AutismLucia SaizNo ratings yet
- Rule 113 114Document7 pagesRule 113 114Shaila GonzalesNo ratings yet
- Appendix - Pcmc2Document8 pagesAppendix - Pcmc2Siva PNo ratings yet
- Stress-Strain Modelfor Grade275 Reinforcingsteel With Cyclic LoadingDocument9 pagesStress-Strain Modelfor Grade275 Reinforcingsteel With Cyclic LoadingRory Cristian Cordero RojoNo ratings yet
- DPSD ProjectDocument30 pagesDPSD ProjectSri NidhiNo ratings yet
- Chronic Kidney DiseaseDocument15 pagesChronic Kidney Diseaseapi-270623039No ratings yet
- Floating Oil Skimmer Design Using Rotary Disc MethDocument9 pagesFloating Oil Skimmer Design Using Rotary Disc MethAhmad YaniNo ratings yet
- The Homework Song FunnyDocument5 pagesThe Homework Song Funnyers57e8s100% (1)
- Chapter 8 Data Collection InstrumentsDocument19 pagesChapter 8 Data Collection InstrumentssharmabastolaNo ratings yet
- 1.technical Specifications (Piling)Document15 pages1.technical Specifications (Piling)Kunal Panchal100% (2)
- 8.ZXSDR B8200 (L200) Principle and Hardware Structure Training Manual-45Document45 pages8.ZXSDR B8200 (L200) Principle and Hardware Structure Training Manual-45mehdi_mehdiNo ratings yet
- Functions in C++Document23 pagesFunctions in C++Abhishek ModiNo ratings yet
- Ozone Therapy - A Clinical Review A. M. Elvis and J. S. EktaDocument5 pagesOzone Therapy - A Clinical Review A. M. Elvis and J. S. Ektatahuti696No ratings yet
- BNF Pos - StockmockDocument14 pagesBNF Pos - StockmockSatish KumarNo ratings yet
- Residual Power Series Method For Obstacle Boundary Value ProblemsDocument5 pagesResidual Power Series Method For Obstacle Boundary Value ProblemsSayiqa JabeenNo ratings yet
- Obesity - The Health Time Bomb: ©LTPHN 2008Document36 pagesObesity - The Health Time Bomb: ©LTPHN 2008EVA PUTRANTO100% (2)
- 3 ALCE Insulators 12R03.1Document12 pages3 ALCE Insulators 12R03.1Amílcar Duarte100% (1)
- LTE Networks Engineering Track Syllabus Overview - 23 - 24Document4 pagesLTE Networks Engineering Track Syllabus Overview - 23 - 24Mohamed SamiNo ratings yet
- Washing Machine: Service ManualDocument66 pagesWashing Machine: Service ManualFernando AlmeidaNo ratings yet
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziFrom Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNo ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- T-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerFrom EverandT-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerRating: 4 out of 5 stars4/5 (4)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideFrom EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideRating: 5 out of 5 stars5/5 (1)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)From EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Rating: 5 out of 5 stars5/5 (5)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- The Digital Mind: How Science is Redefining HumanityFrom EverandThe Digital Mind: How Science is Redefining HumanityRating: 4.5 out of 5 stars4.5/5 (2)
- Workforce 4.0: How AI, the Home Office, and the Gig Economy Are Disrupting the Status QuoFrom EverandWorkforce 4.0: How AI, the Home Office, and the Gig Economy Are Disrupting the Status QuoNo ratings yet
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- The Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsFrom EverandThe Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsNo ratings yet
- Architects of Intelligence: The truth about AI from the people building itFrom EverandArchitects of Intelligence: The truth about AI from the people building itRating: 4.5 out of 5 stars4.5/5 (21)
- A Brief History of Artificial Intelligence: What It Is, Where We Are, and Where We Are GoingFrom EverandA Brief History of Artificial Intelligence: What It Is, Where We Are, and Where We Are GoingRating: 4.5 out of 5 stars4.5/5 (3)