You might also like
- A9 Exp 7Document10 pagesA9 Exp 7Chandra Sekhar KanuruNo ratings yet
- Audio Quantizer Experiment Using MATLAB .... IIT DELHIDocument3 pagesAudio Quantizer Experiment Using MATLAB .... IIT DELHIAnkushNo ratings yet
- Libshitz, S. P., Vanderkooy, J. - Pulse Code Modulation An OverviewDocument16 pagesLibshitz, S. P., Vanderkooy, J. - Pulse Code Modulation An OverviewMartinAggroweNo ratings yet
- (N) and S (N) of Length N (With S (N) S (N) 0 For N N) TheDocument8 pages(N) and S (N) of Length N (With S (N) S (N) 0 For N N) TheSiddhartha DasNo ratings yet
- Channel Estimation Using SVR - REPORTDocument33 pagesChannel Estimation Using SVR - REPORTVighnesh S BhatNo ratings yet
- Farzad Etemadi, Hung-Kang Liu, Nader Bagherzadeh, Fadi J. Kurdahi December 12, 1996Document19 pagesFarzad Etemadi, Hung-Kang Liu, Nader Bagherzadeh, Fadi J. Kurdahi December 12, 1996Andrew JonesNo ratings yet
- Xyz 1Document20 pagesXyz 12406icecreamNo ratings yet
- An Introduction To Turbo Equalization: Ian MarslandDocument36 pagesAn Introduction To Turbo Equalization: Ian MarslandhahutNo ratings yet
- ReportDocument10 pagesReportharika mandadapuNo ratings yet
- Chapter 2 - EEE 4703Document35 pagesChapter 2 - EEE 4703NAZIFA NAWARNo ratings yet
- Fast Computation of Channel-Estimate Based Equalizers in Packet Data TransmissionDocument24 pagesFast Computation of Channel-Estimate Based Equalizers in Packet Data TransmissionSen ZhangNo ratings yet
- Sample Research Paper 1 PDFDocument11 pagesSample Research Paper 1 PDFMr. N. Aravindkumar Asst Prof MECHNo ratings yet
- Clinical Research ExampleDocument11 pagesClinical Research ExamplescossyNo ratings yet
- An Efficient Channel Equalizer Using Artificial Neural NetworksDocument10 pagesAn Efficient Channel Equalizer Using Artificial Neural Networksamreshjha22No ratings yet
- EE370 Lab Experiment 07Document3 pagesEE370 Lab Experiment 07Mustaq AhmedNo ratings yet
- Spreading Sequences For Zero-Forcing DS-CDMA Multiuser DetectorsDocument5 pagesSpreading Sequences For Zero-Forcing DS-CDMA Multiuser DetectorsGopal Jee MishraNo ratings yet
- Chapter 4Document57 pagesChapter 4Krishna Rana MagarNo ratings yet
- DSP 5Document32 pagesDSP 5Jayan GoelNo ratings yet
- A Comparative Study of Different Entropies For Spectrum Sensing TechniquesDocument15 pagesA Comparative Study of Different Entropies For Spectrum Sensing Techniquessuchi87No ratings yet
- Application of Microphone Array For Speech Coding in Noisy EnvironmentDocument5 pagesApplication of Microphone Array For Speech Coding in Noisy Environmentscribd1235207No ratings yet
- Data Communication AssigmentDocument6 pagesData Communication AssigmentAsif AhmedNo ratings yet
- E S (T) (Cos: LZDGDocument4 pagesE S (T) (Cos: LZDGSatya NagendraNo ratings yet
- Instantaneous Pitch Estimation Algorithm Based On Multirate SamplingDocument5 pagesInstantaneous Pitch Estimation Algorithm Based On Multirate SamplingRaiatea MoeataNo ratings yet
- ETN644 Lec8 HandoutsDocument10 pagesETN644 Lec8 HandoutsosamagillaniNo ratings yet
- (17EC29) ACLab Exp 1Document3 pages(17EC29) ACLab Exp 1KamleshNo ratings yet
- Digital Equalization of Chromatic Dispersion and Polarization Mode DispersionDocument11 pagesDigital Equalization of Chromatic Dispersion and Polarization Mode DispersionAliAzarniaNo ratings yet
- Digital Signal Processing (DSP)Document0 pagesDigital Signal Processing (DSP)www.bhawesh.com.npNo ratings yet
- DFT, LP & Cepstral Analysis of Speech SignalDocument24 pagesDFT, LP & Cepstral Analysis of Speech SignalDaniel CNo ratings yet
- On Using Transmission Overhead Efficiently For Channel Estimation in OFDMDocument6 pagesOn Using Transmission Overhead Efficiently For Channel Estimation in OFDMAnonymous uspYoqENo ratings yet
- Scs Mit Feb18Document38 pagesScs Mit Feb18pavan2446No ratings yet
- Regular Pulse ExcitationDocument10 pagesRegular Pulse ExcitationBharavi K SNo ratings yet
- Spectral Content of NRZ Test PatternsDocument5 pagesSpectral Content of NRZ Test PatternsRohan RajagopalNo ratings yet
- Project 1 Matched Filters: Applications of Cross-CorrelationDocument4 pagesProject 1 Matched Filters: Applications of Cross-CorrelationDavidRubeomNo ratings yet
- Equalization and Diversity: School of Information Science and Engineering, SDUDocument93 pagesEqualization and Diversity: School of Information Science and Engineering, SDUSsgn SrinivasaraoNo ratings yet
- Matched Filtering and Timing Recovery in Digital Receivers - Match Filter, Timing RecoveryDocument8 pagesMatched Filtering and Timing Recovery in Digital Receivers - Match Filter, Timing Recoveryjoe2001coolNo ratings yet
- 752 Frequency ModulationDocument10 pages752 Frequency ModulationMiki ArsovskiNo ratings yet
- 1043Document6 pages1043Eng-Sa'di Y. TamimiNo ratings yet
- Implementation of A Basic AECDocument4 pagesImplementation of A Basic AECquitelargeNo ratings yet
- Channel Estimation EJSR 70-1-04Document8 pagesChannel Estimation EJSR 70-1-04حاتم الشرڭيNo ratings yet
- Interference Alignment ThesisDocument4 pagesInterference Alignment Thesisfygynejoheg2100% (2)
- Master's Thesis Defense: Comparison of Noncoherent Detectors For SOQPSK and GMSK in Phase Noise ChannelsDocument55 pagesMaster's Thesis Defense: Comparison of Noncoherent Detectors For SOQPSK and GMSK in Phase Noise ChannelsHaider AsadiNo ratings yet
- Regular-Pulse Excitation-A Novel Approach To Effective and Efficient Multipulse Coding of SpeechDocument10 pagesRegular-Pulse Excitation-A Novel Approach To Effective and Efficient Multipulse Coding of SpeechΚουρδιστόςΑνανάςNo ratings yet
- A Systems Approach To Channel Equalization N.: Dept. 61801, MA USADocument6 pagesA Systems Approach To Channel Equalization N.: Dept. 61801, MA USAAjinkya DeshmukhNo ratings yet
- Aes Audio DigitalDocument40 pagesAes Audio DigitalAnonymous 2Ft4jV2No ratings yet
- Theory:: AWGN ChannelDocument6 pagesTheory:: AWGN ChannelDanishNo ratings yet
- 1 Bit Sigma Delta ADC DesignDocument10 pages1 Bit Sigma Delta ADC DesignNishant SinghNo ratings yet
- Wavelet Soft-Thresholding ofDocument4 pagesWavelet Soft-Thresholding ofjebileeNo ratings yet
- A New Method For B-Format To Binaural TranscodingDocument10 pagesA New Method For B-Format To Binaural Transcodingsagejenson854No ratings yet
- Adaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterDocument7 pagesAdaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterMatthew Luis Llano LoveraNo ratings yet
- Boll79 SuppressionAcousticNoiseSpectralSubtraction PDFDocument8 pagesBoll79 SuppressionAcousticNoiseSpectralSubtraction PDFNguyễn Trí PhướcNo ratings yet
- Equalization and Diversity: School of Information Science and Engineering, SDUDocument93 pagesEqualization and Diversity: School of Information Science and Engineering, SDUPhani JeenuNo ratings yet
- Term Paper On The Compressive Sensing Based On Biorthogonal Wavelet BasisDocument12 pagesTerm Paper On The Compressive Sensing Based On Biorthogonal Wavelet BasisdwipradNo ratings yet
- Baseband M-Ary Pam TransmissionDocument21 pagesBaseband M-Ary Pam TransmissionAnonymous uspYoqE100% (1)
- Analog To Digital Conversion: KIE2008 (Week 4-5)Document42 pagesAnalog To Digital Conversion: KIE2008 (Week 4-5)Kisshur KumarNo ratings yet
- Acquisition of Long Pseudo Code in Dsss SignalDocument4 pagesAcquisition of Long Pseudo Code in Dsss SignalIJMERNo ratings yet
- Transitions from Digital Communications to Quantum Communications: Concepts and ProspectsFrom EverandTransitions from Digital Communications to Quantum Communications: Concepts and ProspectsNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- DACR2RDocument4 pagesDACR2Rsombra1985No ratings yet
- APB ManualDocument104 pagesAPB ManualPatricio LlumiquingaNo ratings yet
- Digital Systems Design - Homework ReportDocument5 pagesDigital Systems Design - Homework ReportProject Symphony Collection100% (4)
- A Prototype Design of Border Alert System For Fishermen Using Gps UpdateDocument32 pagesA Prototype Design of Border Alert System For Fishermen Using Gps UpdateKelly GalvEz50% (2)
- Modeling, Simulation, and Verification of Large DC Power Electronics SystemsDocument7 pagesModeling, Simulation, and Verification of Large DC Power Electronics SystemsAndrés VareloNo ratings yet
- Analog & Digital SignalsDocument15 pagesAnalog & Digital SignalsNouman MemonNo ratings yet
- Differential Amplifier - The Voltage SubtractorDocument4 pagesDifferential Amplifier - The Voltage Subtractorsudheer52No ratings yet
- Van Valkenburg M e Introduction To Modern Network SynthesisDocument256 pagesVan Valkenburg M e Introduction To Modern Network Synthesisfernando6867No ratings yet
- DCMT CompreDocument3 pagesDCMT CompreBlessy JoyNo ratings yet
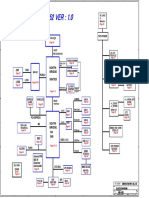
- Ex460 Ms14521 Laptop SchematicDocument49 pagesEx460 Ms14521 Laptop SchematicAndré HipnotistaNo ratings yet
- PSpice-A Tutorial 0136811493 PDFDocument364 pagesPSpice-A Tutorial 0136811493 PDFVinsen Teubun LetsoinNo ratings yet
- Computer GenerationsDocument10 pagesComputer GenerationsJimuel Libunao SupanNo ratings yet
- Ex. No: 2a Simulation of 4X1 Multiplexer Using 3 Modeling Styles in Verilog Date: AimDocument7 pagesEx. No: 2a Simulation of 4X1 Multiplexer Using 3 Modeling Styles in Verilog Date: Aimsamhita santhanamNo ratings yet
- Development of Voltage-Controlled Oscillator 600-800Mhz For Direct Conversion Receiver ArchitectureDocument6 pagesDevelopment of Voltage-Controlled Oscillator 600-800Mhz For Direct Conversion Receiver ArchitectureAzizur RahmanNo ratings yet
- Animation Software For The Teaching of Electrical Transmission LinesDocument12 pagesAnimation Software For The Teaching of Electrical Transmission LinessbuesoNo ratings yet
- SSB Amp Diagram 400w IRFP460Document1 pageSSB Amp Diagram 400w IRFP460Av PlugaruNo ratings yet
- Bry 56 ADocument9 pagesBry 56 AJulianoLuterekNo ratings yet
- Artcessories: User's ManualDocument15 pagesArtcessories: User's Manualzz_creamNo ratings yet
- Relay Setting For 7ut51 Differential Protection RelayDocument12 pagesRelay Setting For 7ut51 Differential Protection Relayyesrojas100% (1)
- Microwave Price Catalog - 2009Document34 pagesMicrowave Price Catalog - 2009juanNo ratings yet
- Datasheet: Modbus TCP/IP Multi Client Enhanced CommunicationsDocument3 pagesDatasheet: Modbus TCP/IP Multi Client Enhanced CommunicationsjesustutaNo ratings yet
- URS of PCRDocument4 pagesURS of PCRnarottam dhupiaNo ratings yet
- g25s Snapdragon APQ8096 SBC Brochure R1.0Document2 pagesg25s Snapdragon APQ8096 SBC Brochure R1.0r.veenaaNo ratings yet
- HC 4520 ServiceDocument187 pagesHC 4520 Service'Egemen KayaNo ratings yet
- Microcontroller Based Pill Reminder: Ronak Rathod Divya Shah Aarsh PathakDocument21 pagesMicrocontroller Based Pill Reminder: Ronak Rathod Divya Shah Aarsh PathakabinayageethaNo ratings yet
- 8.buck Boost ConverterDocument5 pages8.buck Boost Convertermohanrajgupta19No ratings yet
- Specifications: R&S®SMBV100A Vector Signal GeneratorDocument40 pagesSpecifications: R&S®SMBV100A Vector Signal GeneratorPho Duc NamNo ratings yet
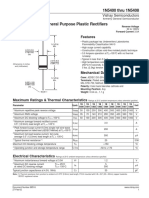
- 1N5XXXDocument2 pages1N5XXXpoke kmNo ratings yet
- Jitter - An Introduction: WhitepaperDocument7 pagesJitter - An Introduction: WhitepaperJalaj JainNo ratings yet
- SC Um 8279Document35 pagesSC Um 8279Isradani MjNo ratings yet