You might also like
- Hadoop TutorialDocument62 pagesHadoop TutorialAbderrazekHmidetNo ratings yet
- Control Law Design For Switched Repetitive Processes With A Metal Rolling ExampleDocument6 pagesControl Law Design For Switched Repetitive Processes With A Metal Rolling ExampleGhaltagh MMMNo ratings yet
- OtanasyDocument242 pagesOtanasyGhaltagh MMMNo ratings yet
- Swamy 15thDocument48 pagesSwamy 15thSheesa1100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Feline Neonatal IsoerythrolysisDocument18 pagesFeline Neonatal IsoerythrolysisPaunas JoshiNo ratings yet
- Chpater 2 PDFDocument44 pagesChpater 2 PDFBilalNo ratings yet
- Kurukku PadaiDocument4 pagesKurukku PadaisimranNo ratings yet
- Critical Care NursingDocument46 pagesCritical Care Nursingraquel_racoNo ratings yet
- Chapter One Understanding Civics and Ethics 1.1.defining Civics, Ethics and MoralityDocument7 pagesChapter One Understanding Civics and Ethics 1.1.defining Civics, Ethics and Moralitynat gatNo ratings yet
- Equine PregnancyDocument36 pagesEquine Pregnancydrdhirenvet100% (1)
- Motion To Strike BasedDocument16 pagesMotion To Strike BasedForeclosure Fraud100% (1)
- SEx 3Document33 pagesSEx 3Amir Madani100% (4)
- Name Numerology Calculator - Chaldean Name Number PredictionsDocument2 pagesName Numerology Calculator - Chaldean Name Number Predictionsarunamurugesan7No ratings yet
- Maths Lowersixth ExamsDocument2 pagesMaths Lowersixth ExamsAlphonsius WongNo ratings yet
- Gandhi Was A British Agent and Brought From SA by British To Sabotage IndiaDocument6 pagesGandhi Was A British Agent and Brought From SA by British To Sabotage Indiakushalmehra100% (2)
- SHS11Q4DLP 21st CentFinalDocument33 pagesSHS11Q4DLP 21st CentFinalNOEMI DE CASTRONo ratings yet
- Contents Serbo-Croatian GrammarDocument2 pagesContents Serbo-Croatian GrammarLeo VasilaNo ratings yet
- Accounting 110: Acc110Document19 pagesAccounting 110: Acc110ahoffm05100% (1)
- CIP Program Report 1992Document180 pagesCIP Program Report 1992cip-libraryNo ratings yet
- Your Free Buyer Persona TemplateDocument8 pagesYour Free Buyer Persona Templateel_nakdjoNo ratings yet
- Druze ScriptureDocument15 pagesDruze ScriptureChristopher DeMott100% (2)
- Business Finance and The SMEsDocument6 pagesBusiness Finance and The SMEstcandelarioNo ratings yet
- Proto Saharan Precursor of Ancient CivilizationsDocument175 pagesProto Saharan Precursor of Ancient CivilizationsClyde Winters100% (4)
- Digital TransmissionDIGITAL TRANSMISSIONDocument2 pagesDigital TransmissionDIGITAL TRANSMISSIONEla DerarajNo ratings yet
- Ergatividad Del Vasco, Teoría Del CasoDocument58 pagesErgatividad Del Vasco, Teoría Del CasoCristian David Urueña UribeNo ratings yet
- A Study of Consumer Behavior in Real Estate Sector: Inderpreet SinghDocument17 pagesA Study of Consumer Behavior in Real Estate Sector: Inderpreet SinghMahesh KhadeNo ratings yet
- Enunciado de La Pregunta: Finalizado Se Puntúa 1.00 Sobre 1.00Document9 pagesEnunciado de La Pregunta: Finalizado Se Puntúa 1.00 Sobre 1.00Samuel MojicaNo ratings yet
- WFRP - White Dwarf 99 - The Ritual (The Enemy Within)Document10 pagesWFRP - White Dwarf 99 - The Ritual (The Enemy Within)Luife Lopez100% (2)
- Nielsen & Co., Inc. v. Lepanto Consolidated Mining Co., 34 Phil, 122 (1915)Document3 pagesNielsen & Co., Inc. v. Lepanto Consolidated Mining Co., 34 Phil, 122 (1915)Abby PajaronNo ratings yet
- K9G8G08B0B SamsungDocument43 pagesK9G8G08B0B SamsungThienNo ratings yet
- Strategic ManagementDocument14 pagesStrategic ManagementvishakhaNo ratings yet
- Information Theory Entropy Relative EntropyDocument60 pagesInformation Theory Entropy Relative EntropyJamesNo ratings yet
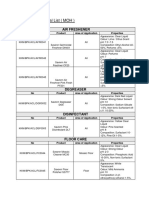
- Approved Chemical ListDocument2 pagesApproved Chemical ListSyed Mansur Alyahya100% (1)
- Final Report - Solving Traveling Salesman Problem by Dynamic Programming Approach in Java Program Aditya Nugroho Ht083276eDocument15 pagesFinal Report - Solving Traveling Salesman Problem by Dynamic Programming Approach in Java Program Aditya Nugroho Ht083276eAytida Ohorgun100% (5)