You might also like
- 3-Axis Compass With Algorithms HMC6343Document13 pages3-Axis Compass With Algorithms HMC6343iMiklaeNo ratings yet
- Digital Compass Solution HMC6352: Features BenefitsDocument13 pagesDigital Compass Solution HMC6352: Features BenefitsCarlos Alberto Espindola SilvaNo ratings yet
- RF and GSM Based Wireless Power Theft MonitoringDocument27 pagesRF and GSM Based Wireless Power Theft MonitoringDebashishParida50% (2)
- Atmel LED Driver-MSLB9082 LED Backlight Driver Module: DatasheetDocument20 pagesAtmel LED Driver-MSLB9082 LED Backlight Driver Module: DatasheetRicky CoxNo ratings yet
- 8×8 LED Matrix MAX7219 With Scrolling Text & Android Control Via BluetoothDocument15 pages8×8 LED Matrix MAX7219 With Scrolling Text & Android Control Via BluetoothakashlogicNo ratings yet
- Ad 557Document6 pagesAd 557TWChan69No ratings yet
- Minitrol Series: Installation & Operating InstructionsDocument26 pagesMinitrol Series: Installation & Operating InstructionsFahrur RadziNo ratings yet
- A Practical Activity Report Submitted For Engineering DESIGN-II (UTA-014)Document8 pagesA Practical Activity Report Submitted For Engineering DESIGN-II (UTA-014)Ritwik MehtaNo ratings yet
- Racal 1222 Config ManualDocument21 pagesRacal 1222 Config ManualjcastilloxNo ratings yet
- Design and Implementation of Digital Trigger Circuit For ConverterDocument6 pagesDesign and Implementation of Digital Trigger Circuit For ConverterBilal Ali AhmadNo ratings yet
- Electromagnetic-Flow Meter-Data SheetDocument8 pagesElectromagnetic-Flow Meter-Data SheetAhmed S ElalaftyNo ratings yet
- S2N Gyro Interface ManualDocument20 pagesS2N Gyro Interface ManualAfrizal Setiawan100% (1)
- ASHIDA Numerical 3OC + 1EF Protection RelayDocument19 pagesASHIDA Numerical 3OC + 1EF Protection RelayNamrata ShettiNo ratings yet
- Technical Description/Installation Manual Synchro/Stepper - NMEA Converter S2N U/N 9028CDocument20 pagesTechnical Description/Installation Manual Synchro/Stepper - NMEA Converter S2N U/N 9028CNasser El AbdNo ratings yet
- Hal1820 2piDocument2 pagesHal1820 2piDaniela AndradeNo ratings yet
- Microcontroller Based DC Motor Control IJERTV1IS3099Document4 pagesMicrocontroller Based DC Motor Control IJERTV1IS3099DARSHAN H SNo ratings yet
- Technical Specifications & Proposed Solution: A - Automatic Weather Station (Aws)Document67 pagesTechnical Specifications & Proposed Solution: A - Automatic Weather Station (Aws)Hamza AliNo ratings yet
- TachometerDocument51 pagesTachometerKiran SugandhiNo ratings yet
- ADR245BDocument19 pagesADR245BNamrata ShettiNo ratings yet
- Protection Features: Relay Design Features:: Local Keys As Well As Remote Setting by Communication PortDocument17 pagesProtection Features: Relay Design Features:: Local Keys As Well As Remote Setting by Communication PortNamrata ShettiNo ratings yet
- Android Based Wireless Home AppliancesDocument44 pagesAndroid Based Wireless Home AppliancesShahzad SaifNo ratings yet
- B202v103 ModemDocument2 pagesB202v103 ModemObey O MadzivireNo ratings yet
- ADR 241 HandoutDocument18 pagesADR 241 HandoutSuranjana DasNo ratings yet
- G70364a STD ManDocument30 pagesG70364a STD Mannyaa_joelNo ratings yet
- Ashida ADR Relay LeafletDocument13 pagesAshida ADR Relay LeafletSuranjana DasNo ratings yet
- Adc 0804Document41 pagesAdc 0804AndySilvandNo ratings yet
- SCALE™-2+ 2SC0106T Preliminary Description & Application ManualDocument19 pagesSCALE™-2+ 2SC0106T Preliminary Description & Application ManualMauro Andre PagliosaNo ratings yet
- Datasheet AEAT-6600Document11 pagesDatasheet AEAT-6600ArminNo ratings yet
- Adr111c 01Document13 pagesAdr111c 01Vishwanath TodurkarNo ratings yet
- STC 60020Document9 pagesSTC 60020darrylcarvalhoNo ratings yet
- Lucy Rmu Ashida Relay ManualDocument11 pagesLucy Rmu Ashida Relay ManualbhpNo ratings yet
- MLX91205 DatasheetDocument14 pagesMLX91205 DatasheetRicardo ReisNo ratings yet
- Bodas Controller RC: Series 22Document18 pagesBodas Controller RC: Series 22studskirby100% (2)
- Protection Features:: (Adityaseries) (Preliminary)Document11 pagesProtection Features:: (Adityaseries) (Preliminary)deccanelec100% (1)
- Index: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionDocument19 pagesIndex: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionKrishnaBihariShuklaNo ratings yet
- Digital Strain-Gage Indicators: Web Design byDocument8 pagesDigital Strain-Gage Indicators: Web Design byJason Han TYNE Engineering Inc.No ratings yet
- ACS712 Hall Effect Current SensorDocument7 pagesACS712 Hall Effect Current SensorWilliam BlackNo ratings yet
- Field Mounted Rate Totaliser Model 202D: 202D-M-V3 20 October 2015Document49 pagesField Mounted Rate Totaliser Model 202D: 202D-M-V3 20 October 2015thomasNo ratings yet
- GSM Based Water Pump ControllerDocument30 pagesGSM Based Water Pump ControllerSatyanarayan MahantaNo ratings yet
- DPM 1As-Bl: Product DescriptionDocument4 pagesDPM 1As-Bl: Product DescriptionFane PelinNo ratings yet
- HMC5883L DatasheetDocument21 pagesHMC5883L DatasheetkishorevennelaNo ratings yet
- 51 52 03 41 hc900 Io Modules Jan23Document44 pages51 52 03 41 hc900 Io Modules Jan23sarah.elfishawyNo ratings yet
- VCNL4000: Vishay SemiconductorsDocument14 pagesVCNL4000: Vishay SemiconductorsDeepak ChandrasekarNo ratings yet
- Global Alert and Control System For Ups BatteryDocument22 pagesGlobal Alert and Control System For Ups BatterySai NithishNo ratings yet
- MCG2000SSIDocument4 pagesMCG2000SSIMarco MartinezNo ratings yet
- TELEMETRY TEMPERATURE MONITOR (Project)Document34 pagesTELEMETRY TEMPERATURE MONITOR (Project)Judpraise AkumsNo ratings yet
- Diff ADR233A - V2 - BESTDocument15 pagesDiff ADR233A - V2 - BESTtoogooodNo ratings yet
- ProjectDocument28 pagesProjectSatyanarayana GurramNo ratings yet
- Nec Ir ProtocolDocument28 pagesNec Ir ProtocolDominic ChanNo ratings yet
- Gs01c50h01-01en 001Document13 pagesGs01c50h01-01en 001Alvaro Quinteros CabreraNo ratings yet
- M3LCR ManualDocument12 pagesM3LCR ManualNovinistanbul TurkluNo ratings yet
- N568PPTDocument29 pagesN568PPTRavi PexelsNo ratings yet
- Seminar Report On Missile Detection SystemDocument26 pagesSeminar Report On Missile Detection SystemSaurabh SinghNo ratings yet
- 10gigabit XFP Optical ReceiverDocument6 pages10gigabit XFP Optical ReceivermichelNo ratings yet
- Underground Cable Fault Location Using Arduino, GSM & GPS: Presentation of Main Project OnDocument24 pagesUnderground Cable Fault Location Using Arduino, GSM & GPS: Presentation of Main Project OnSUKESH GUPTANo ratings yet
- Mini Project ReportDocument27 pagesMini Project Reportakhilmadhu2010No ratings yet
- DC Speed Control Using 8051Document25 pagesDC Speed Control Using 8051musmankhanNo ratings yet
- Vehicle Training Equipment: Common Rail Diesel EngineDocument80 pagesVehicle Training Equipment: Common Rail Diesel Enginestrumf381No ratings yet
- Pja3415ae 1867273Document7 pagesPja3415ae 1867273openjavier5208No ratings yet
- Upstream Advanced C1 - Test BookletDocument24 pagesUpstream Advanced C1 - Test Bookletopenjavier5208No ratings yet
- Art British English TeacherDocument4 pagesArt British English Teacheropenjavier5208No ratings yet
- Eng CD 1355046 A17-2033692Document2 pagesEng CD 1355046 A17-2033692hitachi1992No ratings yet
- CECC 22 340 Electro/Mech Perform. Interface: P/N 73415-0991, ONE PER BAG 73415-0993 73415-0992Document4 pagesCECC 22 340 Electro/Mech Perform. Interface: P/N 73415-0991, ONE PER BAG 73415-0993 73415-0992openjavier5208No ratings yet
- Camshaft Sensor - Hall EffectDocument4 pagesCamshaft Sensor - Hall Effectopenjavier5208No ratings yet
- Engine-Out Characterisation Using Speed-Load Mapping and Reduced Test Cyclefor A Light-Duty Diesel Engine Fuelled With Biodiesel BlendsDocument10 pagesEngine-Out Characterisation Using Speed-Load Mapping and Reduced Test Cyclefor A Light-Duty Diesel Engine Fuelled With Biodiesel Blendsopenjavier5208No ratings yet
- Arduino The Object WayDocument23 pagesArduino The Object Wayopenjavier5208No ratings yet
- Database Creation ProcedureDocument6 pagesDatabase Creation ProcedureFelix J. Alvarez HerreraNo ratings yet
- P. H. Schweitzer-Cetane Rating of Diesel FuelsDocument1 pageP. H. Schweitzer-Cetane Rating of Diesel Fuelsopenjavier5208No ratings yet
- Database Creation ProcedureDocument2 pagesDatabase Creation Procedureopenjavier5208No ratings yet
- P. H. Schweitzer-Cetane Rating of Diesel FuelsDocument1 pageP. H. Schweitzer-Cetane Rating of Diesel Fuelsopenjavier5208No ratings yet
- Demo9s12xdt512 SCH DDocument2 pagesDemo9s12xdt512 SCH Dopenjavier5208No ratings yet
- Faa Order 6850.2b Visual Guidance Lighting SystemsDocument81 pagesFaa Order 6850.2b Visual Guidance Lighting Systemsopenjavier5208No ratings yet
- Simultaneous Reduction of NOx and HC Emissions in A CI Engine Fueled With Methyl Ester of Neem Oil Using Ethylenediamine As Antioxidant AdditiveDocument9 pagesSimultaneous Reduction of NOx and HC Emissions in A CI Engine Fueled With Methyl Ester of Neem Oil Using Ethylenediamine As Antioxidant Additiveopenjavier5208No ratings yet
- Identify A Particular Cable and Not The Colour. in This Instance, The Cables Will Be Numbered at Each End Close To The Harness ConnectorDocument2 pagesIdentify A Particular Cable and Not The Colour. in This Instance, The Cables Will Be Numbered at Each End Close To The Harness Connectoropenjavier5208No ratings yet
- TGrid TutorialsDocument262 pagesTGrid Tutorialsİlyas HamdiyevNo ratings yet
- OBDProgDocument7 pagesOBDProgldasukiNo ratings yet
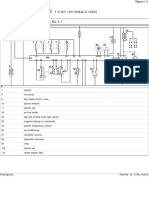
- Peugeot 1.9 Gti 16V Xu9J4/Z (D6C) : Diagrama Eléctrico - Motronic ML 4.1Document1 pagePeugeot 1.9 Gti 16V Xu9J4/Z (D6C) : Diagrama Eléctrico - Motronic ML 4.1openjavier5208No ratings yet
- Welding Procedure Qualification Certificate (EN ISO 15614-1)Document13 pagesWelding Procedure Qualification Certificate (EN ISO 15614-1)openjavier5208No ratings yet
- Maximum - Boost by Corky BellDocument249 pagesMaximum - Boost by Corky Bellopenjavier5208100% (1)
- KD Fi V14 Cinch R10 EN20130624Document12 pagesKD Fi V14 Cinch R10 EN20130624openjavier5208No ratings yet
- TPIC8101 Training Integrado Detectar Picado PDFDocument27 pagesTPIC8101 Training Integrado Detectar Picado PDFopenjavier5208No ratings yet
- MaxonDocument74 pagesMaxonopenjavier5208No ratings yet
- 09-Ijei8-082002je 1Document14 pages09-Ijei8-082002je 1openjavier5208No ratings yet
- Hello Word12 GNUDocument6 pagesHello Word12 GNUopenjavier5208No ratings yet
- A3 InteriorDocument282 pagesA3 InteriorIoan Romosan100% (2)
- CM6206 DatasheetDocument37 pagesCM6206 DatasheetthelaseristNo ratings yet
- V3i1 Ijertv3is10718Document4 pagesV3i1 Ijertv3is10718openjavier5208No ratings yet
- SMAC LCA6-010-XX-3B Spec SheetDocument1 pageSMAC LCA6-010-XX-3B Spec SheetElectromateNo ratings yet
- Manual All MultizetDocument9 pagesManual All MultizetalbundNo ratings yet
- These Airpods 2 Like Truly Wireless Earphones Feature W1 Pairing, Bluetooth 5.0, Wireless Charging Case For 1/4Th The PriceDocument7 pagesThese Airpods 2 Like Truly Wireless Earphones Feature W1 Pairing, Bluetooth 5.0, Wireless Charging Case For 1/4Th The PricePramedicaPerdanaPutraNo ratings yet
- AVK ValveDocument2 pagesAVK Valvemih4iNo ratings yet
- Bosnia Water Information SystemDocument15 pagesBosnia Water Information SystemNamik HadziibrahimovicNo ratings yet
- Howard Voltage RegulatorsDocument8 pagesHoward Voltage Regulatorsrye_eeNo ratings yet
- KSOU Distance MCA SyllabusDocument26 pagesKSOU Distance MCA SyllabusSunil JhaNo ratings yet
- Mirici-155: Miniature Gigabit Ethernet Over Stm-1/Oc-3 ConverterDocument1 pageMirici-155: Miniature Gigabit Ethernet Over Stm-1/Oc-3 Converterrafaelmartins2010No ratings yet
- Vacon CX and Etc PDFDocument317 pagesVacon CX and Etc PDFKashif NadeemNo ratings yet
- T40 E41 M46 G NPB Ver.c PDFDocument51 pagesT40 E41 M46 G NPB Ver.c PDFEduardo AramburuNo ratings yet
- DKD-R - 6-1 2014Document39 pagesDKD-R - 6-1 2014japofff100% (1)
- Airline Reservation SystemDocument26 pagesAirline Reservation SystemNeerajNo ratings yet
- EXP PR EQ180 en R0 - 1 Reduction UnitsDocument24 pagesEXP PR EQ180 en R0 - 1 Reduction UnitsbaliNo ratings yet
- Metashape-Pro 1 5 enDocument145 pagesMetashape-Pro 1 5 enRoberto ENo ratings yet
- SaltDocument25 pagesSaltJitesh ChaudhariNo ratings yet
- How To Setup A Simple Scenario With SAP Records Management 2323Document22 pagesHow To Setup A Simple Scenario With SAP Records Management 2323JORGENo ratings yet
- Manual Computador Bazzaz ZFiDocument5 pagesManual Computador Bazzaz ZFiJuan Miguel RobledoNo ratings yet
- Motr STM32PDF PDFDocument61 pagesMotr STM32PDF PDFtraineeNo ratings yet
- NA-F60A6 F756A F806X Dll.Document34 pagesNA-F60A6 F756A F806X Dll.Rachmat KometNo ratings yet
- Modulating Liquid Level Regulators, Direct-Controlled SV 1 and SV 3Document8 pagesModulating Liquid Level Regulators, Direct-Controlled SV 1 and SV 3carlos50No ratings yet
- Linear and Non Linear TextDocument26 pagesLinear and Non Linear TextMartha Andrea PatcoNo ratings yet
- 553 3001 156 - 14.00Document134 pages553 3001 156 - 14.00bobfuestNo ratings yet
- Why Do We Get Less Internet Speed Than PromisedDocument2 pagesWhy Do We Get Less Internet Speed Than Promisedramakant_soni1988No ratings yet
- KV ComDocument12 pagesKV ComAdi kurniantoNo ratings yet
- 6127-6129-6337-6339-Manual Bascula DetectoDocument16 pages6127-6129-6337-6339-Manual Bascula DetectoeloisaperillaNo ratings yet
- Aiwa Xv-dv290 SMDocument70 pagesAiwa Xv-dv290 SMAngelNo ratings yet
- Eurit 33Document100 pagesEurit 33Anonymous 0WWZi8Ia37No ratings yet
- Pascal's TriangleDocument6 pagesPascal's Triangledhiane09No ratings yet
- Netis Product ListDocument5 pagesNetis Product ListAbel RoblesNo ratings yet
- Final Cut ProDocument16 pagesFinal Cut ProRijy LoranceNo ratings yet
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyFrom EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyRating: 1.5 out of 5 stars1.5/5 (2)
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersFrom EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersNo ratings yet
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- Contactless Vital Signs MonitoringFrom EverandContactless Vital Signs MonitoringWenjin WangNo ratings yet