You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Free Vibration Analysis of Honeycomb Sandwich Beam Using 3D and Continuum ModelDocument6 pagesThe Free Vibration Analysis of Honeycomb Sandwich Beam Using 3D and Continuum Modelsumatrablackcoffee453No ratings yet
- Model-Reduction Techniques For Bayesian Finite Element ModelDocument24 pagesModel-Reduction Techniques For Bayesian Finite Element Modelsumatrablackcoffee453No ratings yet
- Modal and Linear Static Analyses in Inspire With SimSolid Solver PDFDocument10 pagesModal and Linear Static Analyses in Inspire With SimSolid Solver PDFsumatrablackcoffee453No ratings yet
- Model Validation - Correlation For UpdatingDocument14 pagesModel Validation - Correlation For Updatingsumatrablackcoffee453No ratings yet
- Sensors, Degrees of Freedom, and Generalized Modeshape Expansion Methods, #8Document9 pagesSensors, Degrees of Freedom, and Generalized Modeshape Expansion Methods, #8sumatrablackcoffee453No ratings yet
- Sdtools, Chassis Brakes International, Arts Et Metiers Paristech/PimmDocument1 pageSdtools, Chassis Brakes International, Arts Et Metiers Paristech/Pimmsumatrablackcoffee453No ratings yet
- The Strength of Metal JointsDocument4 pagesThe Strength of Metal Jointssumatrablackcoffee453No ratings yet
- Analysis of Nonlinear Oscillators in The Frequency Domain Using Volterra SeriesDocument15 pagesAnalysis of Nonlinear Oscillators in The Frequency Domain Using Volterra Seriessumatrablackcoffee453No ratings yet
- The Stiffness and Damping of Lubricated Joints Subject To Normal Loads PDFDocument9 pagesThe Stiffness and Damping of Lubricated Joints Subject To Normal Loads PDFsumatrablackcoffee453No ratings yet
- Resource Allocation and Scheduling in Cloud Computing - Policy and AlgorithmDocument14 pagesResource Allocation and Scheduling in Cloud Computing - Policy and Algorithmsumatrablackcoffee453No ratings yet
- Inverse Identification of Composite Material Properties by Using A Two-Stage Fourier MethodDocument19 pagesInverse Identification of Composite Material Properties by Using A Two-Stage Fourier Methodsumatrablackcoffee453No ratings yet
- Model Updating of Large Structural Dynamics Models Using Measured Response FunctionsDocument201 pagesModel Updating of Large Structural Dynamics Models Using Measured Response Functionssumatrablackcoffee453100% (1)
- Model Updating in Structural Dynamics - A Generalised Reference Basis ApproachDocument16 pagesModel Updating in Structural Dynamics - A Generalised Reference Basis Approachsumatrablackcoffee453No ratings yet
- A Finite Element Model For The Prediction of Advanced High Strength Steel Spot Welds FractureDocument14 pagesA Finite Element Model For The Prediction of Advanced High Strength Steel Spot Welds Fracturesumatrablackcoffee453No ratings yet
- Review of Options For Structural Design Sensitivity Analysis. Part 1: Linear SystemsDocument31 pagesReview of Options For Structural Design Sensitivity Analysis. Part 1: Linear Systemssumatrablackcoffee453No ratings yet
- Damage Detection Based On Model Updating MethodsDocument24 pagesDamage Detection Based On Model Updating Methodssumatrablackcoffee453No ratings yet
- Updating of Analytical Models For Vibration Prediction of Two-WheelersDocument8 pagesUpdating of Analytical Models For Vibration Prediction of Two-Wheelerssumatrablackcoffee453No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Kuliah - SedPond PDFDocument42 pagesKuliah - SedPond PDFAchmad WisamNo ratings yet
- Chapter 13Document36 pagesChapter 13Usep NuhNo ratings yet
- B. A. Goodman (Auth.), M. J. Wilson FRSE (Eds.) - Clay Mineralogy - Spectroscopic and Chemical Determinative Methods-Springer Netherlands (1994) PDFDocument375 pagesB. A. Goodman (Auth.), M. J. Wilson FRSE (Eds.) - Clay Mineralogy - Spectroscopic and Chemical Determinative Methods-Springer Netherlands (1994) PDFDIAZCORDOBANo ratings yet
- jmm7 7 007 - MicrogeneratorDocument9 pagesjmm7 7 007 - MicrogeneratorsajanNo ratings yet
- Cryoscopic Constants For Calculation of Freezing Point DepressionDocument1 pageCryoscopic Constants For Calculation of Freezing Point DepressionantonioNo ratings yet
- Raj 2014Document10 pagesRaj 2014Monal RajNo ratings yet
- Nutritional Status TemplateDocument14 pagesNutritional Status TemplateAngelica Pastrana Dela CruzNo ratings yet
- Science - Carnival GameDocument2 pagesScience - Carnival Gameapi-384205721No ratings yet
- Acoustic Emission Analysis in Fracture MechanicsDocument28 pagesAcoustic Emission Analysis in Fracture MechanicsVYSHAKH VENUGOPALNo ratings yet
- f5 c1 Force and Motion 2Document35 pagesf5 c1 Force and Motion 2ZULAIKHA BINTI YA'COB MoeNo ratings yet
- Fundamentals of Gas Law of ChemistryDocument17 pagesFundamentals of Gas Law of ChemistryPawan BabelNo ratings yet
- 1 Drag of A Cylinder Using Pendulum MethodDocument9 pages1 Drag of A Cylinder Using Pendulum MethodHarsh MehtaNo ratings yet
- Describing Water Waves Worksheets-Páginas-1-3Document3 pagesDescribing Water Waves Worksheets-Páginas-1-3Dylan Mora FrancoNo ratings yet
- Bes Carey Foster SDocument5 pagesBes Carey Foster SIshan MondalNo ratings yet
- Crgo1 PDFDocument8 pagesCrgo1 PDFimadhuryya5023No ratings yet
- Multicomponent Equilibrium Flash Calculation: TotalsDocument2 pagesMulticomponent Equilibrium Flash Calculation: Totalsprateek_bhoirNo ratings yet
- Peanut and Cheetoe Calorimetry LabDocument4 pagesPeanut and Cheetoe Calorimetry Labapi-329931618No ratings yet
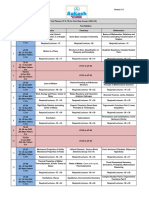
- Aakash Test ScheduleDocument4 pagesAakash Test ScheduleKirtan KumarNo ratings yet
- Test4-Reading Passage 3Document2 pagesTest4-Reading Passage 3vanpham248No ratings yet
- Barber, T. (2007) A Study of Water Surface Deformation Due To Tip Vortices Wing-In-Ground Effect, Journal of Ship Research, 51 (02), Pp. 182-186.Document5 pagesBarber, T. (2007) A Study of Water Surface Deformation Due To Tip Vortices Wing-In-Ground Effect, Journal of Ship Research, 51 (02), Pp. 182-186.Samson Paul PintoNo ratings yet
- Basic Flow Measurement - 2Document128 pagesBasic Flow Measurement - 2NugrahaNo ratings yet
- Offshore HydrodynamicsDocument44 pagesOffshore HydrodynamicsKtk ZadNo ratings yet
- 0625 s10 QP 11Document22 pages0625 s10 QP 11Sam FordNo ratings yet
- Talent Hunt - Test Paper - STD Tenth-Pcmth - SET-A and B 22-11-2014 PDFDocument9 pagesTalent Hunt - Test Paper - STD Tenth-Pcmth - SET-A and B 22-11-2014 PDFRevan Pramod JambhaleNo ratings yet
- UNIT - I, Chapter No.-2 SOLID STATE, 6 Hours, Max. Marks: 10 - 12Document37 pagesUNIT - I, Chapter No.-2 SOLID STATE, 6 Hours, Max. Marks: 10 - 12Dr. Dhondiba Vishwanath100% (1)
- Solutions Manual - Chapter 3 - RespostasDocument8 pagesSolutions Manual - Chapter 3 - RespostasJPVSSNo ratings yet
- PLATES (Guide To Stability Design Criteria For Metal Structures, 6 Ed 2010)Document66 pagesPLATES (Guide To Stability Design Criteria For Metal Structures, 6 Ed 2010)Ysmael Ll.100% (1)
- Yearly Plan Chemistry (Form 4) RevisedDocument21 pagesYearly Plan Chemistry (Form 4) RevisedAziah HusainNo ratings yet
- IEEE STD 43-1974 (A)Document18 pagesIEEE STD 43-1974 (A)NghiaNo ratings yet
- Setup 5-Axis Transformation TRAORI: Configuration of Machine DataDocument11 pagesSetup 5-Axis Transformation TRAORI: Configuration of Machine DataNaveen KumarNo ratings yet