You might also like
- B.I.T.S. Pilani, M. Tech. Software Systems SOFTWARE ARCHITECTURES (ZG653) - Assignment 1Document5 pagesB.I.T.S. Pilani, M. Tech. Software Systems SOFTWARE ARCHITECTURES (ZG653) - Assignment 1SakethKonakanchiNo ratings yet
- Csi ZG518 PDFDocument1 pageCsi ZG518 PDFSakethKonakanchiNo ratings yet
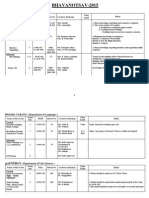
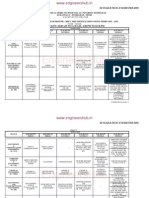
- BHAVANOTSAV 2015: A showcase of talentDocument7 pagesBHAVANOTSAV 2015: A showcase of talentSakethKonakanchiNo ratings yet
- Srs PlanDocument27 pagesSrs PlanManikanta KrishnaNo ratings yet
- Appendix A: Glossary: Afasfajk - Fabsnlfn Klams'lf Mas Asfls Adgmlsd Asghasgl'sag SairamDocument1 pageAppendix A: Glossary: Afasfajk - Fabsnlfn Klams'lf Mas Asfls Adgmlsd Asghasgl'sag SairamSakethKonakanchiNo ratings yet
- Srs OF MPDocument3 pagesSrs OF MPSakethKonakanchiNo ratings yet
- Abstract of PDPDocument1 pageAbstract of PDPSakethKonakanchiNo ratings yet
- OLTP Vs OLAPDocument3 pagesOLTP Vs OLAPSai LakshmiNo ratings yet
- Appendix A: Glossary: Afasfajk - Fabsnlfn Klams'lf Mas Asfls Adgmlsd Asghasgl'sag SairamDocument1 pageAppendix A: Glossary: Afasfajk - Fabsnlfn Klams'lf Mas Asfls Adgmlsd Asghasgl'sag SairamSakethKonakanchiNo ratings yet
- Keypad InterfacingDocument10 pagesKeypad InterfacingSakethKonakanchiNo ratings yet
- Es AsmntDocument3 pagesEs AsmntSakethKonakanchiNo ratings yet
- Acidpro70 ManualDocument354 pagesAcidpro70 ManualSalahuddin MughalNo ratings yet
- Android Mobile Phones Below 6000 in IndiaDocument4 pagesAndroid Mobile Phones Below 6000 in IndiaSakethKonakanchiNo ratings yet
- Jntu Hyderabad Mid 1 Schedule 2015Document7 pagesJntu Hyderabad Mid 1 Schedule 2015vat322No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- NFA To DFA Conversion: Rabin and Scott (1959)Document14 pagesNFA To DFA Conversion: Rabin and Scott (1959)Rahul SinghNo ratings yet
- Organizational Development and EvaluationDocument22 pagesOrganizational Development and EvaluationFransisca RosalinNo ratings yet
- A Data-Based Reliability Analysis of ESPDocument19 pagesA Data-Based Reliability Analysis of ESPfunwithcubingNo ratings yet
- Real Time Braille To Speech Using PythonDocument10 pagesReal Time Braille To Speech Using PythonKali LinuxNo ratings yet
- ResumeDocument4 pagesResumeBazlaa HasmanNo ratings yet
- Cathodic Disbonding TesterDocument1 pageCathodic Disbonding TesterfelavinNo ratings yet
- Mastercam 8.1 Beta 4: New Verification Engine in Beta 4! Sub-Programs Post ChangesDocument48 pagesMastercam 8.1 Beta 4: New Verification Engine in Beta 4! Sub-Programs Post ChangesSaul Saldana LoyaNo ratings yet
- Automatic Helmet DetectDocument4 pagesAutomatic Helmet Detectvasanth100% (1)
- Corporate Presentation Codex International Fev 2022Document9 pagesCorporate Presentation Codex International Fev 2022Stephane SeguierNo ratings yet
- 08 - Chapter 1 - Waveguide-Transmission Line - Microstrip LinesDocument76 pages08 - Chapter 1 - Waveguide-Transmission Line - Microstrip Linesgilberto araujoNo ratings yet
- VnDoc - Tải tài liệu, văn bản pháp luật, biểu mẫu miễn phíDocument7 pagesVnDoc - Tải tài liệu, văn bản pháp luật, biểu mẫu miễn phíStranger NonameNo ratings yet
- Field Behaviour of Stiffened Deep Cement Mixing PilesDocument17 pagesField Behaviour of Stiffened Deep Cement Mixing PilesNguyen Quoc KhanhNo ratings yet
- Yoshimi Advanced User ManualDocument297 pagesYoshimi Advanced User Manualfby999No ratings yet
- C ProgDocument29 pagesC ProgaishwaryaNo ratings yet
- IRCTC Next Generation Eticketing SystemDocument4 pagesIRCTC Next Generation Eticketing Systemsivagokul526No ratings yet
- ECOSYS FS-2100D Ecosys Fs-2100Dn Ecosys Fs-4100Dn Ecosys Fs-4200Dn Ecosys Fs-4300Dn Ecosys Ls-2100Dn Ecosys Ls-4200Dn Ecosys Ls-4300DnDocument33 pagesECOSYS FS-2100D Ecosys Fs-2100Dn Ecosys Fs-4100Dn Ecosys Fs-4200Dn Ecosys Fs-4300Dn Ecosys Ls-2100Dn Ecosys Ls-4200Dn Ecosys Ls-4300DnJosé Bonifácio Marques de AmorimNo ratings yet
- Planning GPS Data Collection: Software Is Provided On The TEC7133 CD-ROM. You Can Also Download ThisDocument5 pagesPlanning GPS Data Collection: Software Is Provided On The TEC7133 CD-ROM. You Can Also Download ThisDoniansyah Mai PutraNo ratings yet
- Diagrama Montacargas AlmacenDocument8 pagesDiagrama Montacargas AlmacenMiguel Gutierrez100% (1)
- Magazine 55 EnglishPartDocument50 pagesMagazine 55 EnglishPartAli AwamiNo ratings yet
- EPABX User's Guide for Making Calls and Using FeaturesDocument4 pagesEPABX User's Guide for Making Calls and Using FeaturesPraveen KumarNo ratings yet
- Specification of PCB800099 Controller Board V1.0Document10 pagesSpecification of PCB800099 Controller Board V1.0benabdullahNo ratings yet
- Article 680 Swimming Pools, Spas, Hot Tubs, Fountains, and Similar InstallationsDocument13 pagesArticle 680 Swimming Pools, Spas, Hot Tubs, Fountains, and Similar InstallationsDocente 361 UMECITNo ratings yet
- Mahusay Module 4 Acc3110Document2 pagesMahusay Module 4 Acc3110Jeth MahusayNo ratings yet
- Summative Test in Grade 10 ScienceDocument2 pagesSummative Test in Grade 10 ScienceRomeo GabitananNo ratings yet
- A320 Flex CalculationDocument10 pagesA320 Flex CalculationMansour TaoualiNo ratings yet
- Alpha 10 Mini Manual Rev1Document2 pagesAlpha 10 Mini Manual Rev1k4gw100% (1)
- Trip WireDocument19 pagesTrip Wirepinky065558100% (2)
- Department Electrical Engineering Management IV Assignment 1 Semester 1, 2020Document2 pagesDepartment Electrical Engineering Management IV Assignment 1 Semester 1, 2020samuelNo ratings yet
- WHLP G9 ESolomon Nov 23-27Document4 pagesWHLP G9 ESolomon Nov 23-27Ericha SolomonNo ratings yet
- How To Think Like Leonarda Da VinciDocument313 pagesHow To Think Like Leonarda Da VinciAd Las94% (35)