You might also like
- Basic Principles of Digital TechnologyDocument68 pagesBasic Principles of Digital Technologyirijskivrtovi4973No ratings yet
- Festo-Proportional Hydraulics Basic LavelDocument126 pagesFesto-Proportional Hydraulics Basic Lavelapi-3808778100% (11)
- Fluid Sim P ManualDocument0 pagesFluid Sim P ManualJesús Adrian Sigala GutiérrezNo ratings yet
- Servo Drive TechnologyDocument102 pagesServo Drive Technologyirijskivrtovi4973No ratings yet
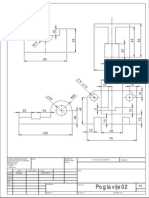
- Poglavlje02 - Sheet1Document1 pagePoglavlje02 - Sheet1irijskivrtovi4973No ratings yet
- Dynamic System Modelling and ControlDocument620 pagesDynamic System Modelling and ControlNikhil ShahNo ratings yet
- FST 2004-03 682300g1Document300 pagesFST 2004-03 682300g1Horacio TerragnoNo ratings yet
- Solidworks Simulation Tutorial REVISED PDFDocument32 pagesSolidworks Simulation Tutorial REVISED PDFKhairun NisaNo ratings yet
- Carl T. Schmidt - Corporatestate in ActionDocument200 pagesCarl T. Schmidt - Corporatestate in Actionirijskivrtovi4973No ratings yet
- Simulation Solid Works 2013Document44 pagesSimulation Solid Works 2013S Prabakaran SanmugasundaramNo ratings yet
- Julius EvolaDocument9 pagesJulius Evolairijskivrtovi4973100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Calibration Frequency enDocument4 pagesCalibration Frequency enGrandy Anantha SaktiNo ratings yet
- IMPLICATIONS OF THE SEVENTH HOUSEDocument7 pagesIMPLICATIONS OF THE SEVENTH HOUSEDurga PrasadNo ratings yet
- Existence of Solutions For Nabla Caputo Left Fractional Boundary Value Problems With A P Laplacian OperatorDocument6 pagesExistence of Solutions For Nabla Caputo Left Fractional Boundary Value Problems With A P Laplacian OperatorjournalNo ratings yet
- CENTRIFUGE SEPARATION PROCESSDocument61 pagesCENTRIFUGE SEPARATION PROCESSWazif Zakwan100% (1)
- Department of Chemistry: PG - SyllabusDocument43 pagesDepartment of Chemistry: PG - SyllabusYocobSamandrewsNo ratings yet
- Air Force Golden Jubilee Institute: Subroto Park New Delhi - 110010Document3 pagesAir Force Golden Jubilee Institute: Subroto Park New Delhi - 110010Nidhi SheokandNo ratings yet
- Families of Functions (4.2)Document2 pagesFamilies of Functions (4.2)teachopensourceNo ratings yet
- Analysis in Fastrak Building Designer AISC PDFDocument8 pagesAnalysis in Fastrak Building Designer AISC PDFGregory RogersNo ratings yet
- Nikola Tesla's Groundbreaking Work on Radiant EnergyDocument35 pagesNikola Tesla's Groundbreaking Work on Radiant Energy434lap100% (1)
- Practical 2Document10 pagesPractical 2Zulaikha ZulkifliNo ratings yet
- G10 Physics P2Document12 pagesG10 Physics P2Trevor G. SamarooNo ratings yet
- John Hancock Center: Case Study of Structural DesignDocument37 pagesJohn Hancock Center: Case Study of Structural DesignbaluNo ratings yet
- Comparative Evaluation of HVDC and HVAC Transmission SystemsDocument5 pagesComparative Evaluation of HVDC and HVAC Transmission SystemsZak TahirkheliNo ratings yet
- Manual Sonda Espectral NitraVis WTWDocument60 pagesManual Sonda Espectral NitraVis WTWleonardoNo ratings yet
- Flight 1909 v1 n06 Feb.6 PDFDocument14 pagesFlight 1909 v1 n06 Feb.6 PDFunicorn1969No ratings yet
- Pipe Culvert DesignDocument20 pagesPipe Culvert Designarif_rubin70% (10)
- Applied Statistics and Probability For Engineers, 5th EditionDocument23 pagesApplied Statistics and Probability For Engineers, 5th EditionMuhammadHazmiMokhtar75% (4)
- Probing W/O Crude Emulsions by Organic Acid Doping: Interactions of Asphaltenes and AcidsDocument29 pagesProbing W/O Crude Emulsions by Organic Acid Doping: Interactions of Asphaltenes and AcidsdariojvrNo ratings yet
- Grey EcologyDocument4 pagesGrey EcologymyeregNo ratings yet
- IP Testing WebDocument1 pageIP Testing WebIndra Utama IchsanNo ratings yet
- Anoop Pinjala 11110016 Two Diemensional Heat Conduction (Electrical Analog)Document4 pagesAnoop Pinjala 11110016 Two Diemensional Heat Conduction (Electrical Analog)Pinjala Anoop0% (1)
- Classical ElectrodynamicsDocument1 pageClassical ElectrodynamicsasrafilNo ratings yet
- 542933c Atys G M Nmo enDocument54 pages542933c Atys G M Nmo enTudorNo ratings yet
- Expt 1 - Reciprocal TheoremDocument4 pagesExpt 1 - Reciprocal Theoremjyoti swaroop repaka100% (1)
- Paper Chromatography of Gel Ink PensDocument4 pagesPaper Chromatography of Gel Ink PensdaveNo ratings yet
- Curse of Dimensionality, Dimensionality Reduction With PCADocument36 pagesCurse of Dimensionality, Dimensionality Reduction With PCAYonatanNo ratings yet
- IGCSE Physics - General PhysicsDocument15 pagesIGCSE Physics - General PhysicsJerrySemuelNo ratings yet
- Control of Systems With Constraints PDFDocument194 pagesControl of Systems With Constraints PDFAntonio MartinezNo ratings yet
- Learning Package in ScienceDocument15 pagesLearning Package in ScienceAbi Comia100% (1)
- CH 17Document22 pagesCH 17Andrea RobinsonNo ratings yet