You might also like
- Ddec IV Application and InstallationDocument148 pagesDdec IV Application and Installationsptecnico8292% (36)
- USAF Test Pilot SchoolDocument34 pagesUSAF Test Pilot Schoolbmccune7187No ratings yet
- Spreadsheet Practice Exercises-2017Document43 pagesSpreadsheet Practice Exercises-2017Sur Velan100% (1)
- Mojave Desert Backcountry Flying: Notes on Landing Zones and AirstripsDocument31 pagesMojave Desert Backcountry Flying: Notes on Landing Zones and Airstripsbmccune7187No ratings yet
- C-130 Structural Changes Through Its LifeDocument47 pagesC-130 Structural Changes Through Its Lifeedofstress100% (4)
- Organizational and Intermediate Maintenance Manual With Repair Parts List For M16a2, M16a4, M4, M4a1Document370 pagesOrganizational and Intermediate Maintenance Manual With Repair Parts List For M16a2, M16a4, M4, M4a1C.A. MonroeNo ratings yet
- Organizational and Intermediate Maintenance Manual With Repair Parts List For M16a2, M16a4, M4, M4a1Document370 pagesOrganizational and Intermediate Maintenance Manual With Repair Parts List For M16a2, M16a4, M4, M4a1C.A. MonroeNo ratings yet
- P 1289 PDFDocument171 pagesP 1289 PDFbmccune7187No ratings yet
- Tad 1Document7 pagesTad 1Reza IraniNo ratings yet
- The TIROS 6 Meteorological Satellite SystemDocument122 pagesThe TIROS 6 Meteorological Satellite SystemBob AndrepontNo ratings yet
- Stargate CIA-RDP96-00787R000100200002-9Document19 pagesStargate CIA-RDP96-00787R000100200002-9taabenaNo ratings yet
- Aerodynamics For Naval AviatorsDocument432 pagesAerodynamics For Naval AviatorsBrian Sinclair100% (1)
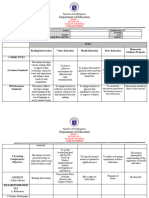
- DLL Catch Up Friday Grade 4 Jan 19Document7 pagesDLL Catch Up Friday Grade 4 Jan 19reyannmolinacruz21100% (30)
- Surveyor E Press KitDocument52 pagesSurveyor E Press KitBob AndrepontNo ratings yet
- Results of The Third United States Manned Orbital SpaceflightDocument126 pagesResults of The Third United States Manned Orbital SpaceflightBob AndrepontNo ratings yet
- Nimbus-B2 Press KitDocument50 pagesNimbus-B2 Press KitBob AndrepontNo ratings yet
- Introduction to Satellite Remote Sensing: Atmosphere, Ocean, Land and Cryosphere ApplicationsFrom EverandIntroduction to Satellite Remote Sensing: Atmosphere, Ocean, Land and Cryosphere ApplicationsNo ratings yet
- 004-Fligh System Implementation in A UAVDocument51 pages004-Fligh System Implementation in A UAVAria IraniNo ratings yet
- SENSORS FOR SPACE APPLICATIONSDocument6 pagesSENSORS FOR SPACE APPLICATIONSamiriut97No ratings yet
- STS-41D National Space Transportation Systems Program Mission ReportDocument18 pagesSTS-41D National Space Transportation Systems Program Mission ReportBob AndrepontNo ratings yet
- Ionosphere Explorer (Explorer XX) Press KitDocument22 pagesIonosphere Explorer (Explorer XX) Press KitBob AndrepontNo ratings yet
- MOB200 - Going Digital: SAP Mobile Technology Strategy and RoadmapDocument41 pagesMOB200 - Going Digital: SAP Mobile Technology Strategy and RoadmapRaviNo ratings yet
- Britain, Germany and Colonial Violence in South-West Africa, 1884-1919Document238 pagesBritain, Germany and Colonial Violence in South-West Africa, 1884-1919Саша ШестаковаNo ratings yet
- New TIP Course 4 (DepEd Teacher)Document58 pagesNew TIP Course 4 (DepEd Teacher)Venessa Mulig100% (2)
- Viking Press HandbookDocument89 pagesViking Press HandbookBob AndrepontNo ratings yet
- Happier at Home by Gretchen Rubin - ExcerptDocument39 pagesHappier at Home by Gretchen Rubin - ExcerptCrown Publishing Group69% (16)
- MSFC Skylab Kohoutek Mission Experiments EvaluationDocument49 pagesMSFC Skylab Kohoutek Mission Experiments EvaluationBob Andrepont100% (1)
- Spitzer Space Telescope Mission DesignDocument10 pagesSpitzer Space Telescope Mission DesignBäbÿ ÇhêrrýNo ratings yet
- Proceedings of The Space Surveillance Workshop - Volume 1 PDFDocument207 pagesProceedings of The Space Surveillance Workshop - Volume 1 PDFClifford StoneNo ratings yet
- S. B. Mende Et Al., 2000Document28 pagesS. B. Mende Et Al., 2000Neil BiswasNo ratings yet
- UAV for Mineral Exploration Using Magnetics and SARDocument6 pagesUAV for Mineral Exploration Using Magnetics and SARShivam ShuklaNo ratings yet
- THE Messenger: Telescopes and InstrumentationDocument48 pagesTHE Messenger: Telescopes and InstrumentationEuropean Southern ObservatoryNo ratings yet
- Chris D. Boone Et Al - Retrievals For The Atmospheric Chemistry Experiment Fourier-Transform SpectrometerDocument14 pagesChris D. Boone Et Al - Retrievals For The Atmospheric Chemistry Experiment Fourier-Transform SpectrometerRemazzzNo ratings yet
- GRS-A Press KitDocument23 pagesGRS-A Press KitBob AndrepontNo ratings yet
- SPIE Edinburgh 2012 Paper8541 21 - v2Document12 pagesSPIE Edinburgh 2012 Paper8541 21 - v2Balson VijaishNo ratings yet
- Indicator Species Population Monitoring in Antarctica With UavDocument5 pagesIndicator Species Population Monitoring in Antarctica With UavВир ВоллNo ratings yet
- Lhires III High Resolution SpectrographDocument6 pagesLhires III High Resolution SpectrographParlin Octavian Waldemar TambunanNo ratings yet
- Planetary Atmosphere Experiments Test Press KitDocument23 pagesPlanetary Atmosphere Experiments Test Press KitBob AndrepontNo ratings yet
- Department of Physics, University of Maryland College Park, MD, USADocument9 pagesDepartment of Physics, University of Maryland College Park, MD, USAUmav24No ratings yet
- EUVE Press KitDocument18 pagesEUVE Press KitBob AndrepontNo ratings yet
- A Low Cost Imaging Displacement Measurement System For Spacecraft Thermal Vacuum TestingDocument10 pagesA Low Cost Imaging Displacement Measurement System For Spacecraft Thermal Vacuum TestinghabeebNo ratings yet
- Sun Et Al 2004Document4 pagesSun Et Al 2004api-39598022No ratings yet
- Cannon R-1962Document13 pagesCannon R-1962Петро ДмитеркоNo ratings yet
- Design and Performance of the ALMA-J Prototype AntennaDocument9 pagesDesign and Performance of the ALMA-J Prototype AntennaManoj KumarNo ratings yet
- Horizon Sensing Attitude Stabilisation SystemDocument9 pagesHorizon Sensing Attitude Stabilisation SystemAnonymous 9feJpOwNo ratings yet
- Imaging Reveals Wave Dynamics in the Hydroxyl Nightglow LayerDocument13 pagesImaging Reveals Wave Dynamics in the Hydroxyl Nightglow LayerAsoUmeNo ratings yet
- GNSS Systems ExplainedDocument25 pagesGNSS Systems ExplainedIbrahim BodonNo ratings yet
- Results of The AEROS Satellite Program SummaryDocument273 pagesResults of The AEROS Satellite Program SummaryBob AndrepontNo ratings yet
- Introduction To Microwave Remote SensingDocument28 pagesIntroduction To Microwave Remote SensingbingwazzupNo ratings yet
- Ye La 1Document11 pagesYe La 1agulisanoNo ratings yet
- The Transonic Free Flight RangeDocument47 pagesThe Transonic Free Flight RangeRhonda BushNo ratings yet
- Renu DR A0Document96 pagesRenu DR A0kgrhoadsNo ratings yet
- Science Verification Observations On VLT-UT1 Completed: Observing With The VLTDocument48 pagesScience Verification Observations On VLT-UT1 Completed: Observing With The VLTEuropean Southern ObservatoryNo ratings yet
- Measuring Offshore Winds by KBDocument13 pagesMeasuring Offshore Winds by KBKelly BoydNo ratings yet
- Imaging Visible and Infrared Radiometers Multi-Spectral Analysis Active/PassiveDocument39 pagesImaging Visible and Infrared Radiometers Multi-Spectral Analysis Active/PassivesmyeganehNo ratings yet
- ME5000 MekometerDocument80 pagesME5000 MekometerDjordje NikolicNo ratings yet
- The Messenger: No. 124 - June 2006Document48 pagesThe Messenger: No. 124 - June 2006European Southern ObservatoryNo ratings yet
- Esro-I Press KitDocument21 pagesEsro-I Press KitBob AndrepontNo ratings yet
- Gemini Reentry Communications ExperimentDocument30 pagesGemini Reentry Communications ExperimentBob AndrepontNo ratings yet
- Analysis of A Navigation Antenna Installed On A Civil AirplaneDocument4 pagesAnalysis of A Navigation Antenna Installed On A Civil Airplanefakher hamoucheNo ratings yet
- Calibration and Testing of A Terrestrial Laser Scanner: D. D. Lichti, M. P. Stewart, M. Tsakiri and A. J. SnowDocument8 pagesCalibration and Testing of A Terrestrial Laser Scanner: D. D. Lichti, M. P. Stewart, M. Tsakiri and A. J. SnowRachmad AgungNo ratings yet
- Proceedings of The 2001 Antenna Applications Symposium Volume 2 AFRL SN HS TR 2002 002Document365 pagesProceedings of The 2001 Antenna Applications Symposium Volume 2 AFRL SN HS TR 2002 002disvala100% (1)
- First Scientific Results With The VLT in Visitor and Service ModesDocument60 pagesFirst Scientific Results With The VLT in Visitor and Service ModesEuropean Southern ObservatoryNo ratings yet
- Remote Sensing: Radiometric Calibration Methodology of The Landsat 8 Thermal Infrared SensorDocument19 pagesRemote Sensing: Radiometric Calibration Methodology of The Landsat 8 Thermal Infrared SensorAstrolabeNo ratings yet
- Multiphase Spectroscopic Observations of The Long-Period Cepheids L CarinaeDocument4 pagesMultiphase Spectroscopic Observations of The Long-Period Cepheids L CarinaeRamses Jerez NicurcarNo ratings yet
- Trail BlazerDocument39 pagesTrail BlazerDavid VươngNo ratings yet
- CALIPSO Lidar Description and Performance Assessment: OlumeDocument15 pagesCALIPSO Lidar Description and Performance Assessment: Olumebitconcepts9781No ratings yet
- 2015 - Aerial Radiation Monitoring Around The Fukushima Dai-Ichi Nuclear Power Plant - SanadaDocument6 pages2015 - Aerial Radiation Monitoring Around The Fukushima Dai-Ichi Nuclear Power Plant - SanadaRiriNo ratings yet
- The Use of A Cubesat To Validate Technological Bricks in SpaceDocument7 pagesThe Use of A Cubesat To Validate Technological Bricks in Spacellmm_088No ratings yet
- Eole Press KitDocument15 pagesEole Press KitBob AndrepontNo ratings yet
- AR 94 - EUSO Balloon - Underflight - JINST 2018 13 P05023Document19 pagesAR 94 - EUSO Balloon - Underflight - JINST 2018 13 P05023cettina.maccaroneNo ratings yet
- Ada 426107Document178 pagesAda 426107naranjitoNo ratings yet
- Apollo 11 19730062927 - 1973062927Document444 pagesApollo 11 19730062927 - 1973062927threadwormNo ratings yet
- Radio Remote-Control and Telemetry and Their Application to MissilesFrom EverandRadio Remote-Control and Telemetry and Their Application to MissilesRating: 4 out of 5 stars4/5 (1)
- OBJ Datastream PDFDocument49 pagesOBJ Datastream PDFbmccune7187No ratings yet
- Cap CDR PDFDocument45 pagesCap CDR PDFbmccune7187No ratings yet
- Cap CDR PDFDocument45 pagesCap CDR PDFbmccune7187No ratings yet
- 1278BK1 wch7 PDFDocument488 pages1278BK1 wch7 PDFbmccune7187No ratings yet
- Successful Integration of Commercial Systems A Study of Commercial Derivative Aircraft June 2011 PDFDocument222 pagesSuccessful Integration of Commercial Systems A Study of Commercial Derivative Aircraft June 2011 PDFbmccune7187No ratings yet
- OBJ Datastream PDFDocument49 pagesOBJ Datastream PDFbmccune7187No ratings yet
- 1278BK1 wch7 PDFDocument488 pages1278BK1 wch7 PDFbmccune7187No ratings yet
- Ada 491047 Final Report On Field Collectible DataDocument116 pagesAda 491047 Final Report On Field Collectible Databmccune7187No ratings yet
- 87963main H-1195Document17 pages87963main H-1195bmccune7187No ratings yet
- L88 New Cuyama Runway MarkingsDocument3 pagesL88 New Cuyama Runway Markingsbmccune7187No ratings yet
- Ada 435973Document101 pagesAda 435973bmccune7187No ratings yet
- AG-024B-S-15-9012 CWN Airtankers Final For FBODocument149 pagesAG-024B-S-15-9012 CWN Airtankers Final For FBObmccune7187No ratings yet
- 1108 BrilDocument4 pages1108 Brilbmccune7187No ratings yet
- CFAR Autotrend Evaluation Exceeds Fixed Threshold DetectionDocument35 pagesCFAR Autotrend Evaluation Exceeds Fixed Threshold Detectionbmccune7187No ratings yet
- The Space Debris Threat and The Kessler Syndrome: Why Is The Problem Getting Worse?Document8 pagesThe Space Debris Threat and The Kessler Syndrome: Why Is The Problem Getting Worse?bmccune7187No ratings yet
- ATOS Airborne Tatical Observation Surveillance SystemDocument22 pagesATOS Airborne Tatical Observation Surveillance Systembmccune7187No ratings yet
- Us 3708902 Survival WeaponDocument9 pagesUs 3708902 Survival Weaponbmccune7187No ratings yet
- 4 - 2013-06-26 ECi Cylinder Failure Talking Points PDFDocument8 pages4 - 2013-06-26 ECi Cylinder Failure Talking Points PDFbmccune7187No ratings yet
- Ad 0600470Document265 pagesAd 0600470bmccune7187No ratings yet
- A 346110 Wind Tunnel Testing For The Drag Reduction of Laser TurretsDocument111 pagesA 346110 Wind Tunnel Testing For The Drag Reduction of Laser Turretsbmccune7187No ratings yet
- AIAA-2009-77 C-130 Aero LoadsDocument23 pagesAIAA-2009-77 C-130 Aero Loadsbmccune7187No ratings yet
- ER-2 Handbook 02Document133 pagesER-2 Handbook 02bmccune7187100% (1)
- 13jun Taranto MatthewDocument89 pages13jun Taranto Matthewbmccune7187No ratings yet
- Microsoft MB-210 Exam Dumps With Latest MB-210 PDFDocument10 pagesMicrosoft MB-210 Exam Dumps With Latest MB-210 PDFJamesMartinNo ratings yet
- DE Monthly Assessment - IDocument5 pagesDE Monthly Assessment - IJay KakadiyaNo ratings yet
- Articol S.brînza, V.stati Pag.96Document154 pagesArticol S.brînza, V.stati Pag.96crina1996No ratings yet
- CHAPTER 9 Microsoft Excel 2016 Back ExerciseDocument3 pagesCHAPTER 9 Microsoft Excel 2016 Back ExerciseGargi SinghNo ratings yet
- Clare Foster CVDocument2 pagesClare Foster CVfostressNo ratings yet
- Revit Quiz 1 ReviewerDocument13 pagesRevit Quiz 1 ReviewerLanz RamosNo ratings yet
- AlumaCore OPGWDocument1 pageAlumaCore OPGWlepouletNo ratings yet
- Revison 5 - Adverbs of TimeDocument50 pagesRevison 5 - Adverbs of Timeluis fernandoNo ratings yet
- Lecture Notes Natural LawDocument52 pagesLecture Notes Natural LawVina EstherNo ratings yet
- Z22 Double-Suction Axially-Split Single-Stage Centrifugal PumpDocument2 pagesZ22 Double-Suction Axially-Split Single-Stage Centrifugal Pumpmartín_suárez_110% (1)
- UntitledDocument1 pageUntitledMoizur RahmanNo ratings yet
- Evaluation of Earthquake-Induced Cracking of Embankment DamsDocument21 pagesEvaluation of Earthquake-Induced Cracking of Embankment DamsMARCOS ABRAHAM ALEJANDRO BALDOCEDA HUAYASNo ratings yet
- Vray Physical Camera GuideDocument4 pagesVray Physical Camera GuideeoghanobrienNo ratings yet
- Kollmorgen S300 Servo Drive ManualDocument134 pagesKollmorgen S300 Servo Drive ManualCarlos SalazarNo ratings yet
- Pre-Admission Interview Slip TemplateDocument1 pagePre-Admission Interview Slip TemplateLeaniel SilvaNo ratings yet
- Redmi 9 Power Blazing Blue, 64 GB: Adilaxmi E-Commerce Private LimitedDocument1 pageRedmi 9 Power Blazing Blue, 64 GB: Adilaxmi E-Commerce Private Limitedask meNo ratings yet
- Generac Generac CAT MTU Cummins KohlerDocument3 pagesGenerac Generac CAT MTU Cummins KohlerJuly E. Maldonado M.No ratings yet
- BJT AmplifiersDocument21 pagesBJT AmplifiersAligato John RayNo ratings yet
- Trends in Maternal Mortality: Executive SummaryDocument16 pagesTrends in Maternal Mortality: Executive SummarykansaNo ratings yet
- Fines Tcs198 2x36wDocument8 pagesFines Tcs198 2x36wwilber ticonaNo ratings yet
- Management Quality ManagementDocument7 pagesManagement Quality ManagementJasmine LimNo ratings yet
- Consumer Behavior Quiz (01-16-21)Document3 pagesConsumer Behavior Quiz (01-16-21)litNo ratings yet
- Chapter Arithmetic and Geometric Progressions 024005Document14 pagesChapter Arithmetic and Geometric Progressions 024005ravichandran_brNo ratings yet