You might also like
- Supervisory Control AND Data Acquisition (Scada)Document42 pagesSupervisory Control AND Data Acquisition (Scada)rajatjn89No ratings yet
- Three Generations of SCADA System ArchitecturesDocument5 pagesThree Generations of SCADA System Architecturesjob_pNo ratings yet
- SCADA ArchitechturesDocument9 pagesSCADA ArchitechturesRAHUL DARANDALENo ratings yet
- Tsang SCADA AttacksDocument23 pagesTsang SCADA Attacksmanu2020No ratings yet
- Supervisory SystemsDocument23 pagesSupervisory Systemspotugaadu1No ratings yet
- Scada SystemDocument9 pagesScada SystemAaqibRNo ratings yet
- Substation Automation Basics - The Next Generation: By: By: John Mcdonald, P.EDocument5 pagesSubstation Automation Basics - The Next Generation: By: By: John Mcdonald, P.ELaxman VeerepalliNo ratings yet
- SCADA Communications and Protocols PDFDocument8 pagesSCADA Communications and Protocols PDFMuhammad UsmanNo ratings yet
- Evolutions of Scada SystemDocument6 pagesEvolutions of Scada SystemArif Rahman Juanda100% (1)
- SCADA CommunicationDocument38 pagesSCADA CommunicationPreethamNo ratings yet
- Substation SCADA Cybersecurity Best PracticesDocument12 pagesSubstation SCADA Cybersecurity Best PracticesGeorgeNo ratings yet
- Scada Protocols and Communication Trends: by Rao KalapatapuDocument11 pagesScada Protocols and Communication Trends: by Rao Kalapataputariq.s8261No ratings yet
- Substation Comms IntroDocument23 pagesSubstation Comms IntroNeelakandan MasilamaniNo ratings yet
- Scada DMS 20.6.2013Document68 pagesScada DMS 20.6.2013Vaneet GuptaNo ratings yet
- Scada System Software RequirementsDocument21 pagesScada System Software RequirementsadactivatorNo ratings yet
- Totally Integrated Power ProtectionDocument38 pagesTotally Integrated Power Protectionvthiseas100% (1)
- Scada Basics - Ncs Tib 04-1Document76 pagesScada Basics - Ncs Tib 04-1Shreya GanguliNo ratings yet
- QSA37T0005-1P (Proposal Technical Basis Assumption)Document10 pagesQSA37T0005-1P (Proposal Technical Basis Assumption)anon_832516663No ratings yet
- Various Operating States in Power System and Their Control StrategiesDocument25 pagesVarious Operating States in Power System and Their Control Strategiesmanu_ram1No ratings yet
- Scada On Hydro Power Plant Cascade - Case StudyDocument49 pagesScada On Hydro Power Plant Cascade - Case StudyRaju KumarNo ratings yet
- FST Dfs Dnp3 EthernetDocument4 pagesFST Dfs Dnp3 EthernetEric DunnNo ratings yet
- Modbus TCP OverviewDocument23 pagesModbus TCP Overviewkim_poyNo ratings yet
- NSTB PDFDocument218 pagesNSTB PDFRandy LangleyNo ratings yet
- Lecture 3Document26 pagesLecture 3Anonymous 2vaaNbDvNo ratings yet
- Voltage Control Techniques Session 1Document23 pagesVoltage Control Techniques Session 1Sumit SinghNo ratings yet
- Brochure Simatic Wincc v72 enDocument8 pagesBrochure Simatic Wincc v72 enjeanfmirandaNo ratings yet
- 1 Substation Automation Solutions - SAS600 Series Rev B CompressedDocument106 pages1 Substation Automation Solutions - SAS600 Series Rev B CompressedcastrojpNo ratings yet
- A SCADA ComunicationsDocument27 pagesA SCADA ComunicationslasheeeenNo ratings yet
- Simaris Control SiemensDocument21 pagesSimaris Control SiemensKijo SupicNo ratings yet
- OPC AutomationDocument18 pagesOPC AutomationAdimas YudistiraNo ratings yet
- ScadaDocument3 pagesScadaAkira SatoNo ratings yet
- Phasor Mesurement System in BrazilDocument8 pagesPhasor Mesurement System in Brazilrodrigo_saaNo ratings yet
- SCADA-Networking Protocol For Data ExchangeDocument83 pagesSCADA-Networking Protocol For Data ExchangeRaja RamNo ratings yet
- RTD Temperature MeasurementDocument22 pagesRTD Temperature MeasurementverneNo ratings yet
- Transmission Line Protection 2Document28 pagesTransmission Line Protection 2sebsbie zewduNo ratings yet
- 1.7 Industrial Redundant Networks - Marc Lee, Belden AutomationDocument34 pages1.7 Industrial Redundant Networks - Marc Lee, Belden AutomationWill RojNo ratings yet
- RtuDocument2 pagesRtuTibor DanielNo ratings yet
- BY: Sayed Qaisar Shah Bs Telecom, Ccna, Cwna REG# A1DE-109004 DATE: 01-08-12Document44 pagesBY: Sayed Qaisar Shah Bs Telecom, Ccna, Cwna REG# A1DE-109004 DATE: 01-08-12Muntaha Daudpota100% (1)
- Iec 61850 - Communication Networks and Systems in SubstationsDocument16 pagesIec 61850 - Communication Networks and Systems in SubstationsCamiloNo ratings yet
- Power System Protection - Part 10Document22 pagesPower System Protection - Part 10Matthew WongNo ratings yet
- Scada Application Flyer - SmallDocument6 pagesScada Application Flyer - Smallosto72No ratings yet
- Iec 60870-5Document6 pagesIec 60870-5netloncoNo ratings yet
- Multiplexing - Definition - Types of Multiplexing: FDM, WDM, TDMDocument14 pagesMultiplexing - Definition - Types of Multiplexing: FDM, WDM, TDMYohannis DanielNo ratings yet
- Power Line Carrier CommunicationDocument23 pagesPower Line Carrier CommunicationMUDAM ALEKYANo ratings yet
- Advances in Power System ManagementDocument15 pagesAdvances in Power System ManagementKalyan RanjanNo ratings yet
- Chapter 8 Part D SCADA System - FinalDocument36 pagesChapter 8 Part D SCADA System - FinalSOMU_61100% (1)
- IEC104 Gateway Datasheet 01Document4 pagesIEC104 Gateway Datasheet 01borle_vilasNo ratings yet
- Modern Numerical Relay DesignDocument65 pagesModern Numerical Relay DesignNeelakandan MasilamaniNo ratings yet
- SYS600 IEC 61850 System Design PDFDocument72 pagesSYS600 IEC 61850 System Design PDFMHEP_DANIELNo ratings yet
- Symphony Plus S Control Ac870pDocument8 pagesSymphony Plus S Control Ac870pCristian TilinschiNo ratings yet
- ABB Alarm Management Fingerprint v1 19apr12Document8 pagesABB Alarm Management Fingerprint v1 19apr12Ahmed KhairyNo ratings yet
- ABB Micro SCADA - BrochureDocument2 pagesABB Micro SCADA - BrochureNo RegreTsNo ratings yet
- Siemens LOGO EthernetDocument5 pagesSiemens LOGO Ethernetsraja72chinnu1837No ratings yet
- PRESENTATION Plant Control System Display and SupportDocument22 pagesPRESENTATION Plant Control System Display and SupportcarneoliaNo ratings yet
- Spectrum Power 3 Release3.9Document2 pagesSpectrum Power 3 Release3.9Yane HdezNo ratings yet
- Power Management Using PLC and ScadaDocument8 pagesPower Management Using PLC and Scadaanon_735401345No ratings yet
- Security-Chapter1 - 1 - Intro - 1.0 - v1.0 PDFDocument18 pagesSecurity-Chapter1 - 1 - Intro - 1.0 - v1.0 PDFAlexandra Buendia100% (1)
- ClearSCADA 2014 R2Document27 pagesClearSCADA 2014 R2Nehemias RamirezNo ratings yet
- Nimrod (1-32)Document7 pagesNimrod (1-32)Gabardn asaNo ratings yet
- Toplighting Compact enDocument4 pagesToplighting Compact enUmer Hussain MoverNo ratings yet
- Computer Fundamentals LectureDocument5 pagesComputer Fundamentals LectureEumer SalanguitNo ratings yet
- For 21042021Document10 pagesFor 21042021joydipindraniNo ratings yet
- @pandora Instagram Report - InstaupDocument4 pages@pandora Instagram Report - InstaupRocío ÁlvarezNo ratings yet
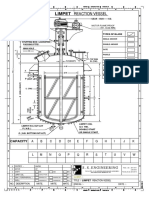
- Limpet Reaction Vessel PDFDocument1 pageLimpet Reaction Vessel PDFarajamani78No ratings yet
- TeklaDocument13 pagesTeklaKamal MousserNo ratings yet
- Intranet, Extranet, Internet: Deepti KhannaDocument47 pagesIntranet, Extranet, Internet: Deepti KhannaGeetanjli SharmaNo ratings yet
- Vacancy AnnouncementDocument2 pagesVacancy AnnouncementSoe Zar Ni KyawNo ratings yet
- Mickey Mouse Clubhouse 1Document4 pagesMickey Mouse Clubhouse 1Dany JacobsNo ratings yet
- Bill of Quantity Pekerjaan Pengadaan Peralatan Utama Tata Udara Proyek Rpa Giritontro Wono Giri Jawa TengahDocument29 pagesBill of Quantity Pekerjaan Pengadaan Peralatan Utama Tata Udara Proyek Rpa Giritontro Wono Giri Jawa TengahSyahrulNo ratings yet
- Star Clip Art - Google SearchDocument1 pageStar Clip Art - Google SearchHM - 06BE 839268 McClure PSNo ratings yet
- User Manual: RS232/RS485/RS422 / Modbus - ConverterDocument26 pagesUser Manual: RS232/RS485/RS422 / Modbus - Converterel misNo ratings yet
- Deltav Function 2 PDF Free (196 271)Document76 pagesDeltav Function 2 PDF Free (196 271)Александр ГончарNo ratings yet
- Strategi Serikat Pekerja Ditengah Industri 4.0: Bhima Yudhistira AdhinegaraDocument17 pagesStrategi Serikat Pekerja Ditengah Industri 4.0: Bhima Yudhistira AdhinegaraAhmad MustajibNo ratings yet
- Normal Probability Distribution and Z TableDocument4 pagesNormal Probability Distribution and Z TableAnimeliciousNo ratings yet
- FortiGate Licensing MatrixDocument1 pageFortiGate Licensing MatrixabaheabaheNo ratings yet
- Asset Tracking For Physical Goods For Agromall Strategy DocumentDocument11 pagesAsset Tracking For Physical Goods For Agromall Strategy DocumentAderayo OnipedeNo ratings yet
- Detecting The Financial Statement Fraud The Analysis of The Differences Between Data Mining Techniques and Experts' JudgmentsDocument12 pagesDetecting The Financial Statement Fraud The Analysis of The Differences Between Data Mining Techniques and Experts' JudgmentsMohsin Ul Amin KhanNo ratings yet
- Victor VC890C+ 3 1 - 2 Digital MultimeterDocument2 pagesVictor VC890C+ 3 1 - 2 Digital MultimeterThân NguyễnNo ratings yet
- 1.2 - CEC342 - Post-Silicon Production Flow - Test and Packing - Characterization Versus Production TestingDocument3 pages1.2 - CEC342 - Post-Silicon Production Flow - Test and Packing - Characterization Versus Production TestingSriram Sundar SubramanianNo ratings yet
- Ch.1 of ADICDocument45 pagesCh.1 of ADICTestAutomationSel2020No ratings yet
- API 618 CompressorsDocument2 pagesAPI 618 CompressorsHimawan Sigit NugrohoNo ratings yet
- RoboticsCustomizedUIManual (091 120)Document30 pagesRoboticsCustomizedUIManual (091 120)たかとしNo ratings yet
- Module 4 Topic Digital Signature-1Document24 pagesModule 4 Topic Digital Signature-1Nishanth MeganNo ratings yet
- Email CorrespondenceDocument10 pagesEmail CorrespondenceOSHIN KUMARINo ratings yet
- Learning DjangoDocument228 pagesLearning DjangoSunil SinghNo ratings yet
- User Manual MAM 890 - V01Document24 pagesUser Manual MAM 890 - V01Brian Steve Perez Quintero100% (1)
- Muting Light Curtain DOC V21 enDocument59 pagesMuting Light Curtain DOC V21 enCayetano CaceresNo ratings yet
- Intel Desktop Board VC820: Technical Product SpecificationDocument122 pagesIntel Desktop Board VC820: Technical Product Specificationshriram1082883No ratings yet