You might also like
- Masons Rule SheetDocument13 pagesMasons Rule SheetChristopher MooreNo ratings yet
- Feedback Arc SetDocument8 pagesFeedback Arc SetLaksNo ratings yet
- Theory Flow Graphs : Feedback - Further SignalDocument7 pagesTheory Flow Graphs : Feedback - Further SignalmeifiusNo ratings yet
- Signal-Flow Graphs PDFDocument32 pagesSignal-Flow Graphs PDFالبياتي محمدNo ratings yet
- EE 287 Circuit Theory Marking Scheame: SolutionDocument5 pagesEE 287 Circuit Theory Marking Scheame: SolutionEric Leo AsiamahNo ratings yet
- Method For Load-Flow Solution of Radial Distribution NetworksDocument8 pagesMethod For Load-Flow Solution of Radial Distribution NetworksriyazNo ratings yet
- Lecture Notes 2: 2. Series and Parallel CircuitsDocument26 pagesLecture Notes 2: 2. Series and Parallel CircuitsAlejandro Ca MaNo ratings yet
- Active RC Filters Derivable From LC Ladder Filters Via Linear TransformationsDocument5 pagesActive RC Filters Derivable From LC Ladder Filters Via Linear TransformationsRitesh SinghNo ratings yet
- Self Inductance of A Wire Loop As A Curve IntegralDocument15 pagesSelf Inductance of A Wire Loop As A Curve IntegralRichard SmithNo ratings yet
- Unit 2. Network TopologyDocument7 pagesUnit 2. Network TopologySam AndersonNo ratings yet
- EE201 Matrix AnalysisDocument18 pagesEE201 Matrix AnalysisAeshwrya PandaNo ratings yet
- LG Embedded Jan09Document5 pagesLG Embedded Jan09Junaid AhmadNo ratings yet
- BK ZK: N - : Ak Z-K K 1 M N BK X (N-K) + K 1Document10 pagesBK ZK: N - : Ak Z-K K 1 M N BK X (N-K) + K 1api-127299018No ratings yet
- Network Analysis VTU NotesDocument47 pagesNetwork Analysis VTU NotesSagar S Poojary50% (2)
- 1204 1486Document15 pages1204 1486ShyamSoniNo ratings yet
- Eee-Vii-computer Techniques in Power System Analysis (10ee71) - SolutionDocument106 pagesEee-Vii-computer Techniques in Power System Analysis (10ee71) - Solutionanirudh.r.s.100% (3)
- Microwave and Milimetric-Wave Filters ProjectDocument9 pagesMicrowave and Milimetric-Wave Filters ProjectatharvawazurkarNo ratings yet
- Loop Analysis of DC CKTDocument10 pagesLoop Analysis of DC CKTDev SwainNo ratings yet
- Unit2 KCVDocument47 pagesUnit2 KCVsanoopmkNo ratings yet
- Graph Theory: Penn State Math 485 Lecture Notes: Licensed Under ADocument154 pagesGraph Theory: Penn State Math 485 Lecture Notes: Licensed Under AHakan KÜÇÜKNo ratings yet
- Symbolic Circuit Modeling and Simulation Using A Sparse Matrix: An IntroductionDocument6 pagesSymbolic Circuit Modeling and Simulation Using A Sparse Matrix: An IntroductionmfqcNo ratings yet
- On Kron's DiakopticsDocument5 pagesOn Kron's Diakopticsr_berthetNo ratings yet
- DC and Ac NetworksDocument12 pagesDC and Ac NetworksEzekiel JamesNo ratings yet
- SH Ann OnDocument11 pagesSH Ann OnwaltzaNo ratings yet
- Power Flow AnalysisDocument68 pagesPower Flow AnalysisLuiz Pa100% (1)
- Solutions To CTPSA QuestionBankDocument61 pagesSolutions To CTPSA QuestionBankkrishna moorthyNo ratings yet
- Model Multiwinding TransformDocument8 pagesModel Multiwinding Transformearla1005No ratings yet
- Studies On Crossover and Broadside-Coupled Microstrip Bandstop FiltersDocument4 pagesStudies On Crossover and Broadside-Coupled Microstrip Bandstop FiltersSkillet48No ratings yet
- Cavityfilter 1Document29 pagesCavityfilter 1winwinzNo ratings yet
- G Stewart - Optical Waveguide TheoryDocument28 pagesG Stewart - Optical Waveguide Theory23213mNo ratings yet
- Circuit TheoryDocument534 pagesCircuit TheorysuhelNo ratings yet
- Day 6 Notes Mesh AnalysisDocument11 pagesDay 6 Notes Mesh AnalysisSwaroop RamaswamyNo ratings yet
- Feedback Theory - Further Properties of Signal Flow Graphs - SAMUEL J. MASONDocument7 pagesFeedback Theory - Further Properties of Signal Flow Graphs - SAMUEL J. MASONCristhian Moscoso AchahuancoNo ratings yet
- Electron Beam-Specimen Interactions and Simulation Methods in MicroscopyFrom EverandElectron Beam-Specimen Interactions and Simulation Methods in MicroscopyNo ratings yet
- Day 6 Notes MESH ANALYSISDocument11 pagesDay 6 Notes MESH ANALYSISturzo_eeeNo ratings yet
- EE 287 Circuit Theory Marking Scheame: SolutionDocument5 pagesEE 287 Circuit Theory Marking Scheame: SolutionEric Leo AsiamahNo ratings yet
- Louis H. Kauffman - Remarks On Formal Knot TheoryDocument37 pagesLouis H. Kauffman - Remarks On Formal Knot TheoryOkommNo ratings yet
- Unit V - Paths, Path Products and Regular ExpressionsDocument32 pagesUnit V - Paths, Path Products and Regular ExpressionsNarasimha Vankamamidi100% (1)
- Network AnalysisDocument61 pagesNetwork AnalysisSandeep Kumar50% (2)
- Systems of Linear EquationsDocument26 pagesSystems of Linear EquationsEli LoneyNo ratings yet
- Casoria 2003Document12 pagesCasoria 2003waael abdulhassanNo ratings yet
- Chap - 02r RF and Microwave DesignDocument39 pagesChap - 02r RF and Microwave DesignPrince BoadiNo ratings yet
- Chapter 6 From Power System Analysis - Hadi Saada With Answerst PDFDocument70 pagesChapter 6 From Power System Analysis - Hadi Saada With Answerst PDFطلال النسري33% (6)
- Analysis and Design of Transmission Line Structures by Means of The Geometric Mean Distance - IEEEDocument4 pagesAnalysis and Design of Transmission Line Structures by Means of The Geometric Mean Distance - IEEEJayson PatrickNo ratings yet
- Calculation of PCB Track ImpedanceDocument6 pagesCalculation of PCB Track ImpedanceDurbha RaviNo ratings yet
- Computer Techniques in Power System Analysis NotesDocument151 pagesComputer Techniques in Power System Analysis NotesHarish Kumar GNo ratings yet
- Topology of Series-Parallel Networks : Journal of Mathematical Analysis AND Applications 10Document16 pagesTopology of Series-Parallel Networks : Journal of Mathematical Analysis AND Applications 10Filip KesteliNo ratings yet
- Signal Fow GraphDocument14 pagesSignal Fow GraphLalith AbhiramNo ratings yet
- SchelkunoffDocument8 pagesSchelkunoffjbnh_No ratings yet
- Electrical Machines and Power Systems-1Document13 pagesElectrical Machines and Power Systems-1Hamza AteeqNo ratings yet
- Translines ProjectDocument8 pagesTranslines ProjectOdellien SajaNo ratings yet
- A Block Diagram Approach To Reference Frame Transformation of Converter Dynamic ModelsDocument5 pagesA Block Diagram Approach To Reference Frame Transformation of Converter Dynamic ModelsBabita RajNo ratings yet
- Analogue Electrical Circuit For Simulation of The Duffings OscillatorDocument12 pagesAnalogue Electrical Circuit For Simulation of The Duffings Oscillatoreng_abdullahnNo ratings yet
- Network Analysis - ECE - 3rd Sem - VTU - Unit 2 - Network Topology - Ramisuniverse, RamisuniverseDocument20 pagesNetwork Analysis - ECE - 3rd Sem - VTU - Unit 2 - Network Topology - Ramisuniverse, Ramisuniverseramisuniverse71% (7)
- A Practical Method of Designing RC Active FiltersDocument12 pagesA Practical Method of Designing RC Active Filterslizhi0007No ratings yet
- Loop Analysis of Resistive CircuitDocument11 pagesLoop Analysis of Resistive CircuitVikash Ram MahuriNo ratings yet
- Chapter 5: Regression: 5.1 Meaning and PurposeDocument4 pagesChapter 5: Regression: 5.1 Meaning and PurposeIsraelNo ratings yet
- CHAPTER 4 - Network ModelsDocument11 pagesCHAPTER 4 - Network ModelsGuenivere FajaritoNo ratings yet
- ISA InTech Journal - April 2021Document50 pagesISA InTech Journal - April 2021Ike EdmondNo ratings yet
- Ej. 1 Fin CorpDocument3 pagesEj. 1 Fin CorpChantal AvilesNo ratings yet
- 4.2.4.5 Packet Tracer - Connecting A Wired and Wireless LAN InstructionsDocument5 pages4.2.4.5 Packet Tracer - Connecting A Wired and Wireless LAN InstructionsAhmadHijaziNo ratings yet
- CH-5 Further Percentages AnswersDocument5 pagesCH-5 Further Percentages AnswersMaram MohanNo ratings yet
- Arithmetic QuestionsDocument2 pagesArithmetic QuestionsAmir KhanNo ratings yet
- Zomato Restaurant Clustering & Sentiment Analysis - Ipynb - ColaboratoryDocument27 pagesZomato Restaurant Clustering & Sentiment Analysis - Ipynb - Colaboratorybilal nagoriNo ratings yet
- VimDocument258 pagesVimMichael BarsonNo ratings yet
- BiografijaDocument36 pagesBiografijaStjepan ŠkalicNo ratings yet
- CHAPTER IV The PSYCHOLOGY of YOGA Yoga, One Among The Six Orthodox Schools of Indian ... (PDFDrive)Document64 pagesCHAPTER IV The PSYCHOLOGY of YOGA Yoga, One Among The Six Orthodox Schools of Indian ... (PDFDrive)kriti madhokNo ratings yet
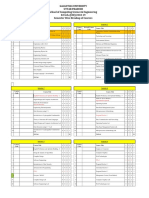
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDocument2 pagesGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiNo ratings yet
- Safety Bulletin 09 - Emergency Escape Breathing Device - Product RecallDocument2 pagesSafety Bulletin 09 - Emergency Escape Breathing Device - Product RecallMuhammadNo ratings yet
- 8 A - 1615864446 - 1605148379 - 1579835163 - Topic - 8.A.EffectiveSchoolsDocument9 pages8 A - 1615864446 - 1605148379 - 1579835163 - Topic - 8.A.EffectiveSchoolsYasodhara ArawwawelaNo ratings yet
- Introduction CompilerDocument47 pagesIntroduction CompilerHarshit SinghNo ratings yet
- IT Level 4 COCDocument2 pagesIT Level 4 COCfikru tesefaye0% (1)
- 40 Sink and FloatDocument38 pages40 Sink and Floatleandro hualverdeNo ratings yet
- Virtual WorkDocument12 pagesVirtual Workdkgupta28No ratings yet
- 220245-MSBTE-22412-Java (Unit 1)Document40 pages220245-MSBTE-22412-Java (Unit 1)Nomaan ShaikhNo ratings yet
- Lacey Robertson Resume 3-6-20Document1 pageLacey Robertson Resume 3-6-20api-410771996No ratings yet
- Boundary Value Analysis 2Document13 pagesBoundary Value Analysis 2Raheela NasimNo ratings yet
- 25 Middlegame Concepts Every Chess Player Must KnowDocument2 pages25 Middlegame Concepts Every Chess Player Must KnowKasparicoNo ratings yet
- Saiva Dharma ShastrasDocument379 pagesSaiva Dharma ShastrasfunnybizNo ratings yet
- Pioneer 1019ah-K Repair ManualDocument162 pagesPioneer 1019ah-K Repair ManualjekNo ratings yet
- 19 Dark PPT TemplateDocument15 pages19 Dark PPT TemplateKurt W. DelleraNo ratings yet
- Sample CVFormat 1Document2 pagesSample CVFormat 1subham.sharmaNo ratings yet
- EMD Question Bank II 2Document4 pagesEMD Question Bank II 2Soham MisalNo ratings yet
- Manuel SYL233 700 EDocument2 pagesManuel SYL233 700 ESiddiqui SarfarazNo ratings yet
- Inspección, Pruebas, Y Mantenimiento de Gabinetes de Ataque Rápido E HidrantesDocument3 pagesInspección, Pruebas, Y Mantenimiento de Gabinetes de Ataque Rápido E HidrantesVICTOR RALPH FLORES GUILLENNo ratings yet
- 0012 Mergers and Acquisitions Current Scenario andDocument20 pages0012 Mergers and Acquisitions Current Scenario andJuke LastNo ratings yet
- Mission and VisionDocument5 pagesMission and VisionsanjedNo ratings yet
- PlateNo 1Document7 pagesPlateNo 1Franz Anfernee Felipe GenerosoNo ratings yet