You might also like
- Capítulo 7 DiáconosDocument7 pagesCapítulo 7 DiáconosOswal BaenaNo ratings yet
- Caso Practico Semana 1Document7 pagesCaso Practico Semana 1Juan Perez100% (1)
- Inversion PrivadaDocument31 pagesInversion PrivadaArian Pamela CalleNo ratings yet
- Análisis de Las Dimensiones ContextualesDocument4 pagesAnálisis de Las Dimensiones ContextualesCesar Jesus Arroyo OscateNo ratings yet
- El Atomo 7Document10 pagesEl Atomo 7Alejandra Ocampo RinconNo ratings yet
- DESPLEGABLEDocument9 pagesDESPLEGABLEclarkmarin86No ratings yet
- Folleto Emulsiones PDFDocument12 pagesFolleto Emulsiones PDFPatricioAntonioDonosoNo ratings yet
- El Mundial de Balonmano Femenino Dejará 40 Millones de Euros en España - Palco23Document5 pagesEl Mundial de Balonmano Femenino Dejará 40 Millones de Euros en España - Palco23Port AventuraNo ratings yet
- MSS Manual VALI EspanolDocument68 pagesMSS Manual VALI EspanolCAMICHILNo ratings yet
- Entre Windows 10 y Win 11Document1 pageEntre Windows 10 y Win 11Jerson CabezasNo ratings yet
- Diseno DS60 Sesion1 LMassoneDocument50 pagesDiseno DS60 Sesion1 LMassonecquintanillaNo ratings yet
- Estudios Previos CHIPAQUEDocument13 pagesEstudios Previos CHIPAQUEAlvaro Stiven MORENO SALINASNo ratings yet
- TrabajoDocument3 pagesTrabajoSonia Nina SulcaNo ratings yet
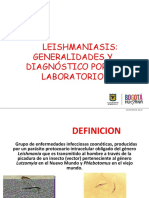
- LEISHMANIASISDocument93 pagesLEISHMANIASISJOHANNA SANTANA100% (1)
- Silabo de Documentacion Comercial y ContableDocument6 pagesSilabo de Documentacion Comercial y ContableAbelCastañedaNo ratings yet
- Presentación Ing. RubinaDocument18 pagesPresentación Ing. RubinaRG Elvis PrinceNo ratings yet
- El Rosario (Florence L. Barclay)Document222 pagesEl Rosario (Florence L. Barclay)Jesús AmadoNo ratings yet
- Ga-1552 Sandra Magalon MLR60 Exportacion-1Document1 pageGa-1552 Sandra Magalon MLR60 Exportacion-1sya2501No ratings yet
- Mi Primer Documento en Word 2019Document9 pagesMi Primer Documento en Word 2019jefflimaramirezNo ratings yet
- Taller Semana 3Document2 pagesTaller Semana 3Nicolas Alias0% (1)
- Informe Psicológico Test Del ÁrbolDocument9 pagesInforme Psicológico Test Del ÁrbolRuth ChacónNo ratings yet
- Solución de La Ecuación de Laplace Mediante El Método Iterativo en El Paquete Informático MatlabDocument5 pagesSolución de La Ecuación de Laplace Mediante El Método Iterativo en El Paquete Informático MatlabChristian CastilloNo ratings yet
- MAPAS Daisy Marroquin GarciaDocument2 pagesMAPAS Daisy Marroquin GarciaDaisy Gissele Marroquín GarcíaNo ratings yet
- FC - Ye. 3er Reforma 2Document83 pagesFC - Ye. 3er Reforma 2Estefanía RiveraNo ratings yet
- TMC - Hierro - Grupo 3Document14 pagesTMC - Hierro - Grupo 3Kayla VeraNo ratings yet
- La Observación y La EncuestaDocument7 pagesLa Observación y La EncuestaVinicio CaldeblanNo ratings yet
- Pre-Primaria PrácticaDocument51 pagesPre-Primaria PrácticaSutuc RosAngelsNo ratings yet
- Tema: Redes Virtuales A La Actualidad, Reconociendo Sus RiesgosDocument3 pagesTema: Redes Virtuales A La Actualidad, Reconociendo Sus RiesgosVane VelaNo ratings yet
- PLÁTANODocument6 pagesPLÁTANODante Luis Cayahuallpa EspinozaNo ratings yet
- Examen Final - Semana 8 - Ra - Segundo Bloque-Macroeconomia - (Grupo2)Document10 pagesExamen Final - Semana 8 - Ra - Segundo Bloque-Macroeconomia - (Grupo2)Martin ValleNo ratings yet