You might also like
- Tipos de Ángulos y TriangulosDocument7 pagesTipos de Ángulos y TriangulosIvánMolinaNo ratings yet
- Plano AfinDocument41 pagesPlano AfinEduardo MenaNo ratings yet
- Transformaciones de Helmert en CoordenadasDocument1 pageTransformaciones de Helmert en CoordenadasJuan Jose Martinez0% (1)
- Trazos de La Circunferencia para Segundo de SecundariaDocument6 pagesTrazos de La Circunferencia para Segundo de SecundariaVivtoria VictoriaNo ratings yet
- Practica Bachillerato 1Document11 pagesPractica Bachillerato 1VitaliyNo ratings yet
- SESIÓN 4 Segmentos 2Document5 pagesSESIÓN 4 Segmentos 2Mishel GualpaNo ratings yet
- La Variación de Un Fenómeno A Través Del TiempoDocument11 pagesLa Variación de Un Fenómeno A Través Del TiempoAntonio Flores Flores100% (4)
- Desarrollo Por Triangulacion PDFDocument11 pagesDesarrollo Por Triangulacion PDFjuanfeb2110% (1)
- Boletin Resolucion Triangulos Con SolucionesDocument3 pagesBoletin Resolucion Triangulos Con SolucionesjosemiNo ratings yet
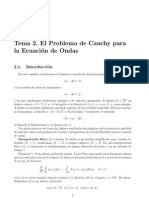
- Ecuaciones en Derivadas ParcialesDocument20 pagesEcuaciones en Derivadas ParcialesalexislomasNo ratings yet
- VectoresDocument8 pagesVectoresJose Rodrigo Quisbert PlataNo ratings yet
- Problemas Propuestos Sesión 08Document16 pagesProblemas Propuestos Sesión 08julio Saguma RiveraNo ratings yet
- 9-Harrinson Tapiero-Tarea 2Document6 pages9-Harrinson Tapiero-Tarea 2Harrinson Tapiero garciaNo ratings yet
- Sesion de Matematica ReajustadoDocument7 pagesSesion de Matematica ReajustadoMelaine Eliane Cjuno RojasNo ratings yet
- Representacion de PlanosDocument19 pagesRepresentacion de Planosaula8045040No ratings yet
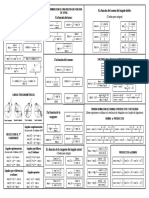
- Trigonometria - FORMULARIO PDFDocument2 pagesTrigonometria - FORMULARIO PDFGustavo Fernández Chapoñán80% (5)
- Resumen de LowenfeldDocument9 pagesResumen de LowenfeldLaura Domrose0% (1)
- Ejercicios Cabri TinfDocument9 pagesEjercicios Cabri TinfsamuelsanchoNo ratings yet
- Arcos MultiplesDocument2 pagesArcos MultiplesDaniel Juarez SerquenNo ratings yet
- G - Semana 6 - 3°Document3 pagesG - Semana 6 - 3°estrella alvarez romeroNo ratings yet
- Libro de Matemática 1ra Parte 151 PáginasDocument151 pagesLibro de Matemática 1ra Parte 151 PáginasSofia VidalNo ratings yet
- Lab Fis-5Document10 pagesLab Fis-5Lopez DayanNo ratings yet
- Informe Momento de InerciaDocument6 pagesInforme Momento de InerciaWILLIAM ANDRÉS GALEANO CUASAPUDNo ratings yet
- Ejercicios de Círculo y Circunferencia PDFDocument3 pagesEjercicios de Círculo y Circunferencia PDFDavid SalazarNo ratings yet
- Geometría DescriptivaDocument6 pagesGeometría DescriptivaIram McfLy0% (1)
- Semana05 VectoresDocument29 pagesSemana05 VectoresJesús ADNo ratings yet
- Glosario EsculturaDocument1 pageGlosario EsculturaPeter LayralNo ratings yet
- ALGEBRA Ok MASDocument243 pagesALGEBRA Ok MASestrellaNo ratings yet