You might also like
- Smart Guidance Stick Project DocumentationDocument7 pagesSmart Guidance Stick Project Documentationsitnah100% (1)
- Ultra SonicDocument15 pagesUltra SonicSridhar KumarNo ratings yet
- Ultrasonic RADAR Project using Microcontroller and Stepper MotorDocument6 pagesUltrasonic RADAR Project using Microcontroller and Stepper Motorricky100% (3)
- Ultrasonic Range SensorDocument8 pagesUltrasonic Range SensorAntonnio Savio LeiteNo ratings yet
- Piano ReportDocument9 pagesPiano ReportMaryam TariqNo ratings yet
- Full Report - E1Document13 pagesFull Report - E1Naddy MohdNo ratings yet
- Sound Activated Intercom DocuDocument15 pagesSound Activated Intercom DocuGanimid AlvarezNo ratings yet
- Mahalakshmi: Unit - Iv - Storage and Display DevicesDocument18 pagesMahalakshmi: Unit - Iv - Storage and Display Devicestareq omarNo ratings yet
- Ultrasonic Motion DetectorDocument9 pagesUltrasonic Motion DetectorMarium AliNo ratings yet
- HArware For Ultrasonic Range MeterDocument16 pagesHArware For Ultrasonic Range MeterMurtaza HasanNo ratings yet
- VvvfgghytrddDocument40 pagesVvvfgghytrddMonther Al-kalbaniNo ratings yet
- Exp 03 Function Generator Using 741 Op-AmpDocument4 pagesExp 03 Function Generator Using 741 Op-Ampkaushal4053100% (2)
- DEPT Lab Question2Document10 pagesDEPT Lab Question2Mostofa Al MuradNo ratings yet
- Analog Devices Circuit NoteDocument7 pagesAnalog Devices Circuit Notevighnesh shanbhagNo ratings yet
- Mkm1133 Instrumentation and Control SystemDocument19 pagesMkm1133 Instrumentation and Control SystemNurul Nadia Mohd ZawawiNo ratings yet
- Learning Electronics Oscillator CircuitDocument10 pagesLearning Electronics Oscillator CircuitRene g100% (1)
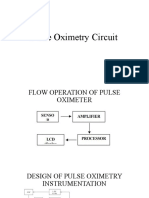
- Pulse Oximetry CircuitDocument19 pagesPulse Oximetry Circuitنواف الجهنيNo ratings yet
- Implementation of Frequency Demodulator Using The PLL Demodulation MethodDocument4 pagesImplementation of Frequency Demodulator Using The PLL Demodulation MethodasmonovNo ratings yet
- Car Parking Guard Circuit Using Infrared SensorDocument5 pagesCar Parking Guard Circuit Using Infrared SensorIshan Kothari100% (4)
- Procedure - AC Circuits and Signal Modulation - W20Document6 pagesProcedure - AC Circuits and Signal Modulation - W20ChocoNo ratings yet
- Calculate 555 oscillator frequencyDocument5 pagesCalculate 555 oscillator frequencysitnah100% (1)
- Low Pass Filter 1st OrderDocument7 pagesLow Pass Filter 1st OrdervlsijpNo ratings yet
- CNS-EE3Document5 pagesCNS-EE3Achilles AldaveNo ratings yet
- WAMI Lab #0 U48789456Document2 pagesWAMI Lab #0 U48789456Muneebur RehmanNo ratings yet
- Designing 915Mhz Oscillator Project Report Ee172 For Dr. KwokDocument21 pagesDesigning 915Mhz Oscillator Project Report Ee172 For Dr. KwokjgalindesNo ratings yet
- Digital Communication Lab Manual ExperimentsDocument50 pagesDigital Communication Lab Manual ExperimentsAniket BhowmikNo ratings yet
- Measurement and Instrumentation Lab 1Document10 pagesMeasurement and Instrumentation Lab 1Mompati Letsweletse100% (1)
- Automatic Street LightDocument13 pagesAutomatic Street LightReymark CrisostomoNo ratings yet
- Pulse Circuits and Ics Lab EC-361Document4 pagesPulse Circuits and Ics Lab EC-361Taj ChinnuNo ratings yet
- S.No. TopicsDocument71 pagesS.No. TopicsKratika JainNo ratings yet
- Simulation of rectifier, amplifier and sensor circuitsDocument12 pagesSimulation of rectifier, amplifier and sensor circuitsShashiNo ratings yet
- Traffic Light Control System ProjectDocument12 pagesTraffic Light Control System ProjectVinay ReddyNo ratings yet
- Electronic Measurement & Instrumentation Lab Lab Manual: Vi SemesterDocument41 pagesElectronic Measurement & Instrumentation Lab Lab Manual: Vi SemesterMy JaanNo ratings yet
- AssignmentDocument11 pagesAssignmentfalab toheebNo ratings yet
- ElectronicsDocument18 pagesElectronicsSrinjay BhattacharyaNo ratings yet
- Lic May-June 2017Document15 pagesLic May-June 2017santhosh sekarNo ratings yet
- Ultrasonic Distance Meter MicrocontrollerDocument11 pagesUltrasonic Distance Meter MicrocontrollerHafiz Murtaza100% (3)
- MD Ridoy - DEPT Lab Question2Document9 pagesMD Ridoy - DEPT Lab Question2Mostofa Al MuradNo ratings yet
- Analog Signal Sampling & Reconstruction Kit. ObjectiveDocument5 pagesAnalog Signal Sampling & Reconstruction Kit. Objectiveankush2302No ratings yet
- Batangas State University Diode ExperimentDocument25 pagesBatangas State University Diode ExperimentRafael AclanNo ratings yet
- Automatic Door Bell System with Object DetectionDocument10 pagesAutomatic Door Bell System with Object DetectionOpeyemi Jamal100% (1)
- Lock-in Amplifier Guide: What is it and How Does it WorkDocument8 pagesLock-in Amplifier Guide: What is it and How Does it WorkBogdan MaricaNo ratings yet
- Analog and Digital Ic'S Short Questions With AnswersDocument41 pagesAnalog and Digital Ic'S Short Questions With Answerspriya adhavanNo ratings yet
- Multivibrator Manual PDFDocument73 pagesMultivibrator Manual PDFAvijitRoyNo ratings yet
- Arduino UnoDocument11 pagesArduino UnoNirav DsouzaNo ratings yet
- EncoderDocument3 pagesEncoderSrini vasanNo ratings yet
- Pulse Amplitude Modulator and 2nd/4th Order Filter DesignDocument14 pagesPulse Amplitude Modulator and 2nd/4th Order Filter DesignRashed IslamNo ratings yet
- LIC Manual MDocument76 pagesLIC Manual MjananirajuNo ratings yet
- Opto CouplerDocument11 pagesOpto CouplerRey GonzalesNo ratings yet
- DCL-01 Ex-01 NSDocument5 pagesDCL-01 Ex-01 NSankush2302No ratings yet
- Chapter 3 Signal Conditioning PDFDocument13 pagesChapter 3 Signal Conditioning PDFBelayneh Tadesse50% (2)
- Design and Construction of A Remote Controlled Fan RegulatorDocument9 pagesDesign and Construction of A Remote Controlled Fan RegulatorkaushaletNo ratings yet
- Automatic Gate Alarm With LightDocument28 pagesAutomatic Gate Alarm With LightAnkur KulkarniNo ratings yet
- Unit 4 NotesDocument9 pagesUnit 4 NotesPrathamesh BhavsarNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Education 2007Document8 pagesEducation 2007Nagabhushan KoppalNo ratings yet
- Revised Guidelines - NTR Videshi VidyadharanaDocument5 pagesRevised Guidelines - NTR Videshi Vidyadharanasitnah100% (1)
- Keynote Address 57th AC at MumbaiDocument8 pagesKeynote Address 57th AC at Mumbaisitnah100% (1)
- English Question Paper 2015Document2 pagesEnglish Question Paper 2015sitnah50% (2)
- NEWS REPORT ON CLEANING AND GREENING A SCHOOLDocument2 pagesNEWS REPORT ON CLEANING AND GREENING A SCHOOLsitnahNo ratings yet
- © Kids Sunday School Place, Inc. All Rights ReservedDocument1 page© Kids Sunday School Place, Inc. All Rights Reservedsitnah100% (1)
- E. Sri Ram - MaqsoodDocument39 pagesE. Sri Ram - Maqsoodsitnah100% (2)
- Lords Prayer CrosswordDocument1 pageLords Prayer Crosswordsitnah100% (1)
- Speech WritingDocument1 pageSpeech Writingsitnah100% (1)
- Sunday School Take Home Page: To ParentsDocument1 pageSunday School Take Home Page: To Parentssitnah100% (1)
- NEWS REPORT ON CLEANING AND GREENING A SCHOOLDocument2 pagesNEWS REPORT ON CLEANING AND GREENING A SCHOOLsitnahNo ratings yet
- Bible UnscrambleDocument1 pageBible Unscramblesitnah100% (1)
- ( (6) ) 555-Timer Receiver Unit (Receiver Driver) :: T 1.1 X R X C (In Seconds)Document4 pages( (6) ) 555-Timer Receiver Unit (Receiver Driver) :: T 1.1 X R X C (In Seconds)sitnahNo ratings yet
- The Beauty of Gods Creation 01Document1 pageThe Beauty of Gods Creation 01sitnahNo ratings yet
- Creation Blocks 01Document2 pagesCreation Blocks 01sitnahNo ratings yet
- Creation Blocks 01Document2 pagesCreation Blocks 01sitnahNo ratings yet
- Sow The Word: © Kids Sunday School Place, Inc. All Rights ReservedDocument1 pageSow The Word: © Kids Sunday School Place, Inc. All Rights Reservedsitnah100% (1)
- Its A Beautiful World 01Document1 pageIts A Beautiful World 01sitnah100% (1)
- The Beauty of Gods Creation 01Document1 pageThe Beauty of Gods Creation 01sitnahNo ratings yet
- Adam Names The Animals 01Document1 pageAdam Names The Animals 01sitnah100% (1)
- S C e N eDocument1 pageS C e N esitnah100% (1)
- SBI Prelim Model PaperDocument25 pagesSBI Prelim Model PaperCodMwNo ratings yet
- Parable of The Sower 01Document1 pageParable of The Sower 01sitnah100% (1)
- The Prophet Daniel 02 TDocument1 pageThe Prophet Daniel 02 Tsitnah100% (1)
- SocialDocument1 pageSocialsitnah100% (1)
- Finite and Non-Finite VerbsDocument3 pagesFinite and Non-Finite VerbssitnahNo ratings yet
- Parable of The Sower 01 TDocument1 pageParable of The Sower 01 TsitnahNo ratings yet
- The Prophet Daniel 02 TDocument1 pageThe Prophet Daniel 02 Tsitnah100% (1)
- Parable of The Sower 01Document1 pageParable of The Sower 01sitnah100% (1)
- Sow The Word: © Kids Sunday School Place, Inc. All Rights ReservedDocument1 pageSow The Word: © Kids Sunday School Place, Inc. All Rights Reservedsitnah100% (1)
- MODEL 632: Product Information SheetDocument4 pagesMODEL 632: Product Information SheetHenrique NogueiraNo ratings yet
- Ono-Sokki General Product GuideDocument43 pagesOno-Sokki General Product Guide王宗超No ratings yet
- MCQ On Mod 1 - PCSDocument3 pagesMCQ On Mod 1 - PCSbhavana_bhsNo ratings yet
- STAMFORD S Range S9 Product Brochure - UnlockedDocument12 pagesSTAMFORD S Range S9 Product Brochure - UnlockedPutri Nur Ayu AmaliaNo ratings yet
- MX 342 Data SheetDocument4 pagesMX 342 Data SheetAhmet ÇolakNo ratings yet
- Raymarine Ray215 Ray215e VHF RadiosDocument68 pagesRaymarine Ray215 Ray215e VHF RadioskiraNo ratings yet
- Sx460 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsDocument4 pagesSx460 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsstmeuNo ratings yet
- Analog Communication Systems: Dr. S. Muni RathnamDocument172 pagesAnalog Communication Systems: Dr. S. Muni RathnamsuryasitNo ratings yet
- Synchronous Detector or Coherent DetectorDocument4 pagesSynchronous Detector or Coherent Detectorkarthik reddyNo ratings yet
- Lmx2595 20-Ghz Wideband Pllatinum™ RF Synthesizer With Phase Synchronization and Jesd204B SupportDocument80 pagesLmx2595 20-Ghz Wideband Pllatinum™ RF Synthesizer With Phase Synchronization and Jesd204B SupportNgô Thanh BìnhNo ratings yet
- 4 74 2087 (XLS1000) OperationsDocument84 pages4 74 2087 (XLS1000) OperationsGUZMAN100% (1)
- Fireclass Addressable Fire Alarm Control Panels: Firmware Version 25Document24 pagesFireclass Addressable Fire Alarm Control Panels: Firmware Version 25Aleksandr GolosovNo ratings yet
- Yokogawa Terminal BoardsDocument4 pagesYokogawa Terminal BoardsMohammed Abd El RazekNo ratings yet
- Radar SystemsDocument12 pagesRadar SystemsSaikiran SrinivasaNo ratings yet
- Laser CommunicationDocument30 pagesLaser CommunicationVEER90No ratings yet
- Unit 3 - 02 FM-Transmitter & Receiver - and Noise PDFDocument29 pagesUnit 3 - 02 FM-Transmitter & Receiver - and Noise PDFNitin Prajapati100% (1)
- 04 - PCS915A Busbar ProtectionDocument218 pages04 - PCS915A Busbar Protectiont.o.i.n.gNo ratings yet
- AM detector circuit more sensitive than diodeDocument6 pagesAM detector circuit more sensitive than diodebaymanNo ratings yet
- Raptor RP1 Traffic Safety RadarDocument93 pagesRaptor RP1 Traffic Safety Radarad044No ratings yet
- AR92xx Family EEPROM Device Configuration Guide: March 2010Document52 pagesAR92xx Family EEPROM Device Configuration Guide: March 2010Suhendri SihombingNo ratings yet
- TMP - 24290-Manual de Sevicio LMB-791715892Document211 pagesTMP - 24290-Manual de Sevicio LMB-791715892Reinaldo Zorrilla92% (13)
- Tda 6508 AddDocument43 pagesTda 6508 AddMukesh ThakkarNo ratings yet
- Sx440, STAMFORD ManualDocument4 pagesSx440, STAMFORD ManualSarawut PipeNo ratings yet
- Super Learning Kit For UNO R3 (CH340)Document178 pagesSuper Learning Kit For UNO R3 (CH340)ENGINEERING DEPARMENTNo ratings yet
- Communication Systems I & Electronic Measurement InstrumentsDocument16 pagesCommunication Systems I & Electronic Measurement InstrumentsrishalNo ratings yet
- M O D E L 3 3 3 A / 3 3 4 A Distortion Analyzer: Operating and Service ManualDocument88 pagesM O D E L 3 3 3 A / 3 3 4 A Distortion Analyzer: Operating and Service Manualemil lenicovNo ratings yet
- Hubbard Amplifying TransformerDocument8 pagesHubbard Amplifying TransformerTomislav JovanovicNo ratings yet
- Manual Servico Icom Ic-Fr3000Document71 pagesManual Servico Icom Ic-Fr3000Valerie RiceNo ratings yet
- Drawing For Final: 45, Namhannam-Ro, Yeongdo-Gu, Busan, Korea Tel: +82 51 412 5551, Fax: +82 51 412 6660Document84 pagesDrawing For Final: 45, Namhannam-Ro, Yeongdo-Gu, Busan, Korea Tel: +82 51 412 5551, Fax: +82 51 412 6660FILIN VLADIMIRNo ratings yet
- DSB SSB Am Receiver Traner Kit Scientech 2202Document1 pageDSB SSB Am Receiver Traner Kit Scientech 2202lusoegyi 1919No ratings yet