You might also like
- Véhicule ÉlectriqueDocument23 pagesVéhicule Électriqueevey511No ratings yet
- AlternateurDocument10 pagesAlternateurgauvain11100% (1)
- AlternateurDocument10 pagesAlternateurgauvain11100% (1)
- Al Jawab Al Moufid PDFDocument124 pagesAl Jawab Al Moufid PDFmuhajira_fi_tunisNo ratings yet
- Va Et Raconte Ce Que Jai Fait Pour ToiDocument54 pagesVa Et Raconte Ce Que Jai Fait Pour ToiJosuedeYahushua100% (1)
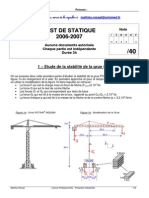
- Exercice Grue Elingue Pince TreuilDocument8 pagesExercice Grue Elingue Pince TreuilIsnotgood Lami100% (1)
- Le Role de La CommunicationDocument16 pagesLe Role de La CommunicationencglandNo ratings yet
- Vie Populaire de Notre-Seigneur Jésus-Christ Abbé Emmanuel Barbier - (Tome 1)Document327 pagesVie Populaire de Notre-Seigneur Jésus-Christ Abbé Emmanuel Barbier - (Tome 1)IHS_MANo ratings yet
- 003 Alternateur Regulation DepannageDocument8 pages003 Alternateur Regulation DepannageHamza Chenaker0% (1)
- Solaire Regu Convertiseur@@Document15 pagesSolaire Regu Convertiseur@@Isnotgood LamiNo ratings yet
- Differentsli Nat Avantage Incon Bms Imp@@wDocument6 pagesDifferentsli Nat Avantage Incon Bms Imp@@wIsnotgood LamiNo ratings yet
- Differentsli Nat Avantage Incon Bms Imp@@wDocument6 pagesDifferentsli Nat Avantage Incon Bms Imp@@wIsnotgood LamiNo ratings yet
- 003 Alternateur Regulation DepannageDocument8 pages003 Alternateur Regulation DepannageHamza Chenaker0% (1)
- ETL307 Chapitre1Document17 pagesETL307 Chapitre1Isnotgood LamiNo ratings yet
- ETL307 Chapitre1Document17 pagesETL307 Chapitre1Isnotgood LamiNo ratings yet
- TP Electronique de PuissanceDocument22 pagesTP Electronique de PuissanceIsnotgood Lami0% (1)
- Batteries Etvoi Elec Tres Impppt@@Document35 pagesBatteries Etvoi Elec Tres Impppt@@Isnotgood LamiNo ratings yet
- TDmagnétisme1 0Document6 pagesTDmagnétisme1 0LindatoumiNo ratings yet
- Condensate UrDocument6 pagesCondensate UrIsnotgood LamiNo ratings yet
- ETL307 Chapitre1Document17 pagesETL307 Chapitre1Isnotgood LamiNo ratings yet
- Condensate UrDocument6 pagesCondensate UrIsnotgood LamiNo ratings yet
- Machines Ccimpo@@Document50 pagesMachines Ccimpo@@Isnotgood LamiNo ratings yet
- Etat de L'art Batteries Topimp@@Document32 pagesEtat de L'art Batteries Topimp@@Isnotgood LamiNo ratings yet
- Batteries Etvoi Elec Tres Impppt@@Document35 pagesBatteries Etvoi Elec Tres Impppt@@Isnotgood LamiNo ratings yet
- Circuit Hydro Ede Oxy RedDocument132 pagesCircuit Hydro Ede Oxy RedIsnotgood LamiNo ratings yet
- TDmagnétisme1 0Document6 pagesTDmagnétisme1 0LindatoumiNo ratings yet
- Solaire Regu Convertiseur@@Document15 pagesSolaire Regu Convertiseur@@Isnotgood LamiNo ratings yet
- Cherge Decherge Intro Imp@@Document80 pagesCherge Decherge Intro Imp@@Isnotgood LamiNo ratings yet
- DROUINEAU 2011 ArchivageDocument200 pagesDROUINEAU 2011 ArchivageIsnotgood LamiNo ratings yet
- Stockage Deferent TypeDocument14 pagesStockage Deferent TypeIsnotgood LamiNo ratings yet
- Batteries - Lithiumavntage IncoDocument8 pagesBatteries - Lithiumavntage IncoIsnotgood LamiNo ratings yet
- Charge BacDocument8 pagesCharge BacIsnotgood LamiNo ratings yet
- 499 Essais Systemes Bts Elec@@Document39 pages499 Essais Systemes Bts Elec@@Isnotgood LamiNo ratings yet
- 003 Alternateur Regulation DepannageDocument8 pages003 Alternateur Regulation DepannageHamza Chenaker0% (1)
- Un Regard Sur La Bibliothèque D'alexandrieDocument13 pagesUn Regard Sur La Bibliothèque D'alexandrierelduchelmi6325No ratings yet
- Notre Dame de Treize-Pierres - Les Clercs de Saint ViateurDocument35 pagesNotre Dame de Treize-Pierres - Les Clercs de Saint ViateurSerso San ViatorNo ratings yet
- TD5 An2 2010Document2 pagesTD5 An2 2010Hamza Fetouh100% (1)
- Fonctions GrammaticalesDocument1 pageFonctions GrammaticalesAhmed ElharrarNo ratings yet
- LES LIMITES DES APPROCHES Des Politiques PubliquesDocument10 pagesLES LIMITES DES APPROCHES Des Politiques PubliquesWilfried EponouNo ratings yet
- Julien MisopogonDocument26 pagesJulien Misopogongustavog1956No ratings yet
- C - Le BonheurDocument5 pagesC - Le Bonheurjenovefa.plNo ratings yet
- Pourquoi Les GuerresDocument4 pagesPourquoi Les GuerresAmel Yagoub100% (1)
- ExercicesDocument3 pagesExercicesheyasmineNo ratings yet
- Une Fille Qui Parle de Sexe Ouvertement, Est-Ce Bon SigneDocument6 pagesUne Fille Qui Parle de Sexe Ouvertement, Est-Ce Bon Signevhones8No ratings yet
- Conjugaison Des Verbes Au PresentDocument12 pagesConjugaison Des Verbes Au PresentRimvydė Katinaitė-MumėnienėNo ratings yet
- Ethique L1 FSDocument3 pagesEthique L1 FSIl Ou ElleNo ratings yet
- Analyse de Match FootDocument2 pagesAnalyse de Match FootAbderrahim OutNo ratings yet
- Grandville - Un Autre MondeDocument345 pagesGrandville - Un Autre MondealacrisviamNo ratings yet
- Disp Delau 2023 01 0035Document55 pagesDisp Delau 2023 01 0035karolannevlogtvNo ratings yet
- Pascal Justice, ForceDocument2 pagesPascal Justice, ForceArtiom RaduNo ratings yet
- Vocabulaire PDFDocument34 pagesVocabulaire PDFalina_ctNo ratings yet
- L038 BethelDocument54 pagesL038 BethelitnrcdrcNo ratings yet
- Exercices Conditionnel PresentDocument4 pagesExercices Conditionnel PresentcoolmarouaneNo ratings yet
- Les Litanies de Satan - Charles BaudelaireDocument7 pagesLes Litanies de Satan - Charles BaudelaireVojislav StojanovicNo ratings yet
- Tribunal Administratif de Lille N°1601386... République FrançaiseDocument19 pagesTribunal Administratif de Lille N°1601386... République Françaiseapi-302695818No ratings yet
- S3 Economie 2017-2018Document116 pagesS3 Economie 2017-2018simoNo ratings yet
- Partie 1Document11 pagesPartie 1Timbila SawadogoNo ratings yet
- TD 3 - La ProductivitéDocument16 pagesTD 3 - La ProductivitéMme et Mr Lafon100% (1)
- Akrich M - COMMENT DECRIRE LES OBJETS TECHNIQUES PDFDocument16 pagesAkrich M - COMMENT DECRIRE LES OBJETS TECHNIQUES PDFstasesNo ratings yet