You might also like
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysFrom EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo ratings yet
- Liaisons Mécanique2019Document4 pagesLiaisons Mécanique2019Mohsen LaabidiNo ratings yet
- TD Liaisons - Schema Cinematique Corrige - 2Document6 pagesTD Liaisons - Schema Cinematique Corrige - 2Ali OuahmadNo ratings yet
- COURS Théorie Des Mécanismes PDFDocument5 pagesCOURS Théorie Des Mécanismes PDFMohamed NaciriNo ratings yet
- Série 01 Avec Solution TypeDocument3 pagesSérie 01 Avec Solution Typenafaa_ali1375No ratings yet
- Correction TD 3 Schéma CinématiqueDocument7 pagesCorrection TD 3 Schéma CinématiqueShooting StarNo ratings yet
- Mecanismes ExercicesDocument6 pagesMecanismes ExercicesOumaima BK0% (1)
- Détail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousDocument2 pagesDétail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousGhebouli SamirNo ratings yet
- U41 CorrigéDocument11 pagesU41 Corrigéanon_24380275% (4)
- DS1 StatiqueDocument5 pagesDS1 StatiqueYassineNo ratings yet
- ANALYSE de MécanismeDocument53 pagesANALYSE de MécanismeAchref Sallami100% (1)
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocument14 pagesChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsNo ratings yet
- Chaines de Solides - Comportement CinématiqueDocument8 pagesChaines de Solides - Comportement CinématiqueAbdelali YacoubiNo ratings yet
- L1-PMI - TP 5 Dessin Industriel 2Document4 pagesL1-PMI - TP 5 Dessin Industriel 2Soufa Ane100% (1)
- Cours Modelisation Des Liaisons eDocument8 pagesCours Modelisation Des Liaisons entayoub100% (1)
- 0 - Activité 3Document6 pages0 - Activité 3Kamel TayahiNo ratings yet
- Correctionnaire Nouveau - Chapitre IVDocument23 pagesCorrectionnaire Nouveau - Chapitre IVdouda777767% (6)
- ds1 1er AnneDocument5 pagesds1 1er AnneTarekMostaphaNo ratings yet
- Ds1-1as-Vé Reglable en Hauteur-2022Document4 pagesDs1-1as-Vé Reglable en Hauteur-2022Saifeddine BrikiNo ratings yet
- Devoir de Controle +Liaisons+MécaniquesN2 1AS 2021Document4 pagesDevoir de Controle +Liaisons+MécaniquesN2 1AS 2021Hamza IsksiouiNo ratings yet
- 03 Cours Le Schema CinematiqueDocument7 pages03 Cours Le Schema CinematiqueMohammed El azhariNo ratings yet
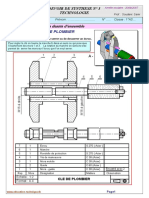
- Devoirdesynthesen3 1as 2006 2007 Cle de Plombier PDFDocument5 pagesDevoirdesynthesen3 1as 2006 2007 Cle de Plombier PDFMohamed B'nNo ratings yet
- Devoir de Construction MécaniqueDocument1 pageDevoir de Construction MécaniqueIkram100% (1)
- Modélisation Cinématique Des MécanismesDocument8 pagesModélisation Cinématique Des MécanismesmounirgemNo ratings yet
- Liaisonsmcaniques 150227135446 Conversion Gate01Document5 pagesLiaisonsmcaniques 150227135446 Conversion Gate01sedmorabet100% (2)
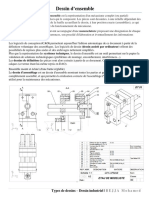
- Dessin D'ensembleDocument1 pageDessin D'ensembleMohamedBejjaNo ratings yet
- Lecture Dessin EnsembleDocument17 pagesLecture Dessin Ensemblemarwen100% (1)
- Roulement BCDocument6 pagesRoulement BCOtman OtoNo ratings yet
- TD Etau de ModelisteDocument6 pagesTD Etau de Modelisteattoumii80% (5)
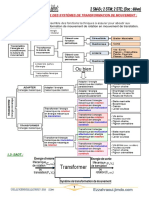
- 17 TransformationDocument10 pages17 TransformationMohamed NaciriNo ratings yet
- Etude Cinematique Du Etude Cinematique Du Cric Electrique Cric ElectriqueDocument4 pagesEtude Cinematique Du Etude Cinematique Du Cric Electrique Cric Electriquemmnlbrice67% (3)
- TD 16 Corrigé - Liaisons - Schéma CinématiqueDocument5 pagesTD 16 Corrigé - Liaisons - Schéma Cinématiquelfadli67% (3)
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2013-2014) MR Mighri LotfiDocument3 pagesDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2013-2014) MR Mighri LotfiRouaissi Ridha0% (1)
- Pivot Cours 2010Document5 pagesPivot Cours 2010walidbhy100% (1)
- TD1 Schéma Ciné Casse ÉcrouDocument2 pagesTD1 Schéma Ciné Casse ÉcrouAlami El100% (3)
- Hyperstatisme Et Mobilité: Liaisons en ParallèleDocument11 pagesHyperstatisme Et Mobilité: Liaisons en ParallèleMohamed OuaggaNo ratings yet
- Cours CotationDocument1 pageCours Cotationabdourazg100% (1)
- Chaines de Cotes - Exercices - 2Document3 pagesChaines de Cotes - Exercices - 2Anas MohtadiNo ratings yet
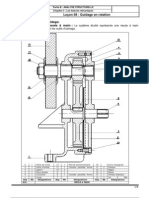
- Cours - Génie Mécanique - Guidage en Rotation - Bac Technique (2015-2016) MR H.sabeurDocument6 pagesCours - Génie Mécanique - Guidage en Rotation - Bac Technique (2015-2016) MR H.sabeurReda Anebari100% (2)
- Devoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Document6 pagesDevoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Imed MoussaNo ratings yet
- Montage RoulementsDocument4 pagesMontage RoulementsHoussam Had100% (2)
- DS1 - 1èr STEDocument4 pagesDS1 - 1èr STEmasteratsii100% (1)
- Liaisons Mécanique2019Document4 pagesLiaisons Mécanique2019Mohsen LaabidiNo ratings yet
- Articulation en Porte À Faux (Act5-5)Document1 pageArticulation en Porte À Faux (Act5-5)MIMFS100% (1)
- Technique CDocument8 pagesTechnique CKarim FathiNo ratings yet
- Cotation ExercicesDocument10 pagesCotation ExercicesYoussef NajihNo ratings yet
- TD 3 TM 2020Document7 pagesTD 3 TM 2020Ammar AthmaniaNo ratings yet
- Devoir+de+Controle+N3 1AS 2015 Etau+de+PLOMBIERDocument6 pagesDevoir+de+Controle+N3 1AS 2015 Etau+de+PLOMBIERSlimTbiniNo ratings yet
- TD FinaleDocument8 pagesTD Finalewass princeNo ratings yet
- Etau de ModelisteDocument5 pagesEtau de Modelisteghgkjh67% (3)
- 07-TD Modelisation Des Liaisons-EDocument5 pages07-TD Modelisation Des Liaisons-EMed Aymen BensalemNo ratings yet
- CC1 - Octobre 2019-Touret - Meuler 2STE1Document4 pagesCC1 - Octobre 2019-Touret - Meuler 2STE1ESSOME ESSOME OLIVIER STEPHANE100% (1)
- Déssin de DéfinitionDocument4 pagesDéssin de DéfinitionMohsen Laabidi100% (1)
- Correction Chapes Applications Dessin+de+definition Coupesimple 2012 2AS NetDocument3 pagesCorrection Chapes Applications Dessin+de+definition Coupesimple 2012 2AS Netchaouch.najehNo ratings yet
- 2019-2020-DSN°2-1ère-Vé RéglableDocument7 pages2019-2020-DSN°2-1ère-Vé RéglableAdam BensaidNo ratings yet
- TD Coupe TubeDocument6 pagesTD Coupe TubeSimo StitNo ratings yet
- TP Serre Joint PRDocument4 pagesTP Serre Joint PRmathfarm95No ratings yet
- 01 0 Serre Joint CorrectionDocument4 pages01 0 Serre Joint CorrectionTesteur MohammediaNo ratings yet
- TP Serre Joint PRDocument4 pagesTP Serre Joint PRmathfarm95No ratings yet
- TD Serre Joint-SujetDocument4 pagesTD Serre Joint-SujetLOLOLOLOLOLOLOL LOLOLOLOLOLOLOLNo ratings yet
- 9624 tp2 Formatif Banc de Trains Roulant Mesure Sur Veuhicule ReuglageDocument4 pages9624 tp2 Formatif Banc de Trains Roulant Mesure Sur Veuhicule ReuglageIbra MoulayNo ratings yet
- 9624 tp1 Formatif Banc de Trains Roulant Preparationa La MesureDocument6 pages9624 tp1 Formatif Banc de Trains Roulant Preparationa La MesureIbra MoulayNo ratings yet
- 9624 Document Ressource Determination de La Position Cremaillerecentree FinalDocument3 pages9624 Document Ressource Determination de La Position Cremaillerecentree FinalIbra MoulayNo ratings yet
- 9624 TD Formatif Usure Des Pneumatiques Controle Tactile Et Visuel Avec Ident RessDocument9 pages9624 TD Formatif Usure Des Pneumatiques Controle Tactile Et Visuel Avec Ident RessIbra MoulayNo ratings yet
- 9624 tp1 Formatif Banc de Trains Roulant Preparationa La MesureDocument6 pages9624 tp1 Formatif Banc de Trains Roulant Preparationa La MesureIbra MoulayNo ratings yet
- 9624 TP Formatif Banc de Freinage 2017 CorrigeDocument5 pages9624 TP Formatif Banc de Freinage 2017 CorrigeIbra MoulayNo ratings yet
- Cours CM1 2014 2015Document172 pagesCours CM1 2014 2015matozo100% (3)
- 9624 Fiche Sequence Ci Maintenance Diagnostic Et Mise Au Point Des Elements de Liaison Au SolDocument6 pages9624 Fiche Sequence Ci Maintenance Diagnostic Et Mise Au Point Des Elements de Liaison Au SolIbra MoulayNo ratings yet
- 9624 TP Formatif Banc de Freinage 2017 CorrigeDocument5 pages9624 TP Formatif Banc de Freinage 2017 CorrigeIbra MoulayNo ratings yet
- Cours CM1 2014 2015Document172 pagesCours CM1 2014 2015matozo100% (3)
- 9878 Recherche de Solutions Et Impression 3dDocument17 pages9878 Recherche de Solutions Et Impression 3dIbra MoulayNo ratings yet
- SpipDocument3 pagesSpipIbra MoulayNo ratings yet
- 9624 Document Ressource Prepartion Mesure Tav FinalDocument6 pages9624 Document Ressource Prepartion Mesure Tav FinalIbra MoulayNo ratings yet
- 9878 Recherche de Solutions Et Impression 3dDocument17 pages9878 Recherche de Solutions Et Impression 3dIbra MoulayNo ratings yet
- Course de VitesseDocument36 pagesCourse de VitesseIbra Moulay33% (3)
- 3 1 1 Modelisation Liaisons PDFDocument2 pages3 1 1 Modelisation Liaisons PDFMohammed ChaabateNo ratings yet
- VMX MécaniqueDocument20 pagesVMX MécaniqueSoulaimaneHassnaouiNo ratings yet
- Centrale MP 2012 (Corrigé)Document11 pagesCentrale MP 2012 (Corrigé)Ibra Moulay100% (1)
- GammeDocument18 pagesGammeMakrem CherifNo ratings yet
- Rain UrageDocument2 pagesRain UrageIbra MoulayNo ratings yet
- Ds Tapis de Course SteDocument7 pagesDs Tapis de Course SteIbra Moulay100% (2)
- 01 - Fiche Pédagogique N°3Document1 page01 - Fiche Pédagogique N°3Ibra MoulayNo ratings yet
- 3 Integrale de Lesbegue Analyse Cours 12-10-09Document10 pages3 Integrale de Lesbegue Analyse Cours 12-10-09Ibra MoulayNo ratings yet
- BAC 2011 SI Normale STM CorrigéDocument8 pagesBAC 2011 SI Normale STM CorrigéIbra Moulay0% (1)
- Transmission de Puissance Par EngrenagesDocument6 pagesTransmission de Puissance Par EngrenagesKhmira WafaNo ratings yet
- 6sigma - DéfinitionsDocument9 pages6sigma - DéfinitionsYoussef HraneNo ratings yet
- 6sigma - D Finition Des Projets PDFDocument4 pages6sigma - D Finition Des Projets PDFIbra MoulayNo ratings yet
- Etude de Projet - Fabrication de Pièces de Décolletage Pour L'automobile PDFDocument129 pagesEtude de Projet - Fabrication de Pièces de Décolletage Pour L'automobile PDFIbra Moulay100% (1)
- PneumatiqueDocument18 pagesPneumatiqueamine100% (9)
- Graf CetDocument8 pagesGraf CetDankov2No ratings yet
- ManualDocument1 pageManualAlex E. Cossio MazaNo ratings yet
- FS Transmetteurs de MVTDocument4 pagesFS Transmetteurs de MVTmecaniquestiNo ratings yet
- DEVOIR DE SYNTHESE' 1ère SC 12 - 13Document5 pagesDEVOIR DE SYNTHESE' 1ère SC 12 - 13Jihen Dridi100% (1)
- Aje9n-Borne Reglable Aves CorrectionDocument3 pagesAje9n-Borne Reglable Aves Correctionsaded05100% (3)
- Travaux Pratiques PneumatiquesDocument12 pagesTravaux Pratiques Pneumatiquesdxsszsz100% (1)
- Electronique - Theorie Et Pratique - Circuits de L'electronique de Amplificateur. Vol 3-DUNODDocument121 pagesElectronique - Theorie Et Pratique - Circuits de L'electronique de Amplificateur. Vol 3-DUNODDjo Brain100% (2)
- La Cotation FonctionnelleDocument10 pagesLa Cotation FonctionnelleBouba Rabeb100% (1)
- 3131TUTOMethodologie CâblerunearmoireélectriqueDocument9 pages3131TUTOMethodologie CâblerunearmoireélectriqueCedric100% (1)
- 2011 Grand Scenic 3 Notice D'utilisationDocument257 pages2011 Grand Scenic 3 Notice D'utilisationJose SousaNo ratings yet
- Colle Régime Continu 1 - CorrigéDocument4 pagesColle Régime Continu 1 - CorrigéMbaira LeilaNo ratings yet
- ZX TD Remplacement EmbraygeDocument24 pagesZX TD Remplacement EmbraygemicropechNo ratings yet
- Podometre PDFDocument7 pagesPodometre PDFGregory PonsNo ratings yet
- TP Mdc2 1 Los AngelesDocument6 pagesTP Mdc2 1 Los AngelesOmar Yami100% (2)
- Calage D'allumageDocument3 pagesCalage D'allumagec2885105No ratings yet
- 3584 Toupie SecuriteDocument2 pages3584 Toupie SecuriteHassan AzmiNo ratings yet
- TP RDM 01Document4 pagesTP RDM 01Sara Bouchelouche100% (2)
- Terminology2001 IDocument190 pagesTerminology2001 Ipopart72No ratings yet
- 8c6rd-Etau de Plombier PDFDocument4 pages8c6rd-Etau de Plombier PDFbecem67% (6)
- 07 Distributeurs Schématisation PDFDocument7 pages07 Distributeurs Schématisation PDFyoussef essasnouiNo ratings yet
- ElectCoursn°3 ENT 15 16 PDFDocument2 pagesElectCoursn°3 ENT 15 16 PDFAnonymous Qzjk6K9GT100% (1)
- Diagnostics Des Infrastructures PortuairesDocument2 pagesDiagnostics Des Infrastructures PortuairesnoussnoussaNo ratings yet
- 189 4 PDFDocument3 pages189 4 PDFZiari SaberNo ratings yet
- 1c31 PDFDocument4 pages1c31 PDFMed Ali MaatougNo ratings yet
- M03 Fabrication de Pièces D'usinage Simple en TournageDocument73 pagesM03 Fabrication de Pièces D'usinage Simple en TournageJawad Eddaiki83% (6)
- Machine Couvrage GlissantesDocument4 pagesMachine Couvrage GlissantesCHOUPO ArmelNo ratings yet
- CHAPITRE II TensionelectriqueDocument4 pagesCHAPITRE II TensionelectriquegeenenNo ratings yet
- Presentation Toiture PDFDocument38 pagesPresentation Toiture PDFRachid RichardNo ratings yet
- 03 - Ordre Des PhasesDocument3 pages03 - Ordre Des PhasesAymen HssainiNo ratings yet
- CH3 Montage Et Demontage Des Roulements PDFDocument10 pagesCH3 Montage Et Demontage Des Roulements PDFMbaira LeilaNo ratings yet
- Technologie - STS Microtechniques - Fraisage HélicoïdalDocument9 pagesTechnologie - STS Microtechniques - Fraisage HélicoïdalHamza Elallam100% (1)