You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Column ChromatographyDocument9 pagesColumn ChromatographyMd Shahjalal Sagor67% (3)
- Auditing RacfDocument57 pagesAuditing Racfசிங்கார வேலன்No ratings yet
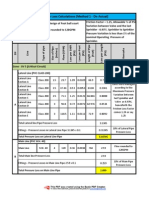
- Friction Loss Calculations of Irrigation Design A Foot Ball CourtDocument13 pagesFriction Loss Calculations of Irrigation Design A Foot Ball Courtmathewmanjooran100% (2)
- Appendix A: Table A1 Load Data and Line Connectivity of 19-Bus Unbalanced RadialDocument22 pagesAppendix A: Table A1 Load Data and Line Connectivity of 19-Bus Unbalanced RadialSudheerKumarNo ratings yet
- Novel High-Pressure PneumaticDocument5 pagesNovel High-Pressure PneumaticSudheerKumarNo ratings yet
- Appendix: Table 1.1 Maximum Harmonic Current DistortionsDocument2 pagesAppendix: Table 1.1 Maximum Harmonic Current DistortionsSudheerKumarNo ratings yet
- Section 4.7 & 4.8: Third Order SystemDocument2 pagesSection 4.7 & 4.8: Third Order SystemSudheerKumarNo ratings yet
- 09 1st and 2nd Order ApproximationsDocument9 pages09 1st and 2nd Order ApproximationsSudheerKumarNo ratings yet
- 17 - List of ReferencesDocument9 pages17 - List of ReferencesSudheerKumarNo ratings yet
- PDFDocument11 pagesPDFSudheerKumarNo ratings yet
- Dynamic Characteristics of PneumaticDocument4 pagesDynamic Characteristics of PneumaticSudheerKumarNo ratings yet
- Novel High-Pressure PneumaticDocument5 pagesNovel High-Pressure PneumaticSudheerKumarNo ratings yet
- 1 - 2011 - Efficient Estimation of Critical Load LevelsDocument11 pages1 - 2011 - Efficient Estimation of Critical Load LevelsSudheerKumarNo ratings yet
- Second Order CircuitsDocument15 pagesSecond Order CircuitsYusmizan YusofNo ratings yet
- Reactive Power PricingDocument10 pagesReactive Power PricingSudheerKumarNo ratings yet
- New Optimization TechniquesDocument26 pagesNew Optimization TechniquesNikhil ThampiNo ratings yet
- Distribution System Nodal Pricing Analysis With Realistic ZIP Load and Variable Wind Power SourceDocument6 pagesDistribution System Nodal Pricing Analysis With Realistic ZIP Load and Variable Wind Power SourceSudheerKumarNo ratings yet
- Bus Door CatalogDocument20 pagesBus Door CatalogSudheerKumarNo ratings yet
- Rodless Pneumatic SystemDocument5 pagesRodless Pneumatic SystemSudheerKumarNo ratings yet
- Islanding and Scheduling of Power Distribution Systems With Distributed GenerationDocument10 pagesIslanding and Scheduling of Power Distribution Systems With Distributed GenerationSudheerKumarNo ratings yet
- OpfDocument20 pagesOpfSudheerKumarNo ratings yet
- (Pure and Applied Mathematics_ a Wiley Series of Texts, Monographs and Tracts) Alexander Stanoyevitch-Introduction to Numerical Ordinary and Partial Differential Equations Using MATLAB-Wiley-InterscieDocument834 pages(Pure and Applied Mathematics_ a Wiley Series of Texts, Monographs and Tracts) Alexander Stanoyevitch-Introduction to Numerical Ordinary and Partial Differential Equations Using MATLAB-Wiley-InterscieSudheerKumarNo ratings yet
- Numerical Methods For Scientific and EngDocument152 pagesNumerical Methods For Scientific and EngSudheerKumarNo ratings yet
- Reactive Power Pricing A Conceptual FrameworkDocument7 pagesReactive Power Pricing A Conceptual FrameworkSudheerKumarNo ratings yet
- Numerical Methods 2009 (CuPpY)Document326 pagesNumerical Methods 2009 (CuPpY)Jonathan Mamburam100% (2)
- Power Flow AnalysisDocument11 pagesPower Flow AnalysisChristina Tio TrisnasariNo ratings yet
- Continuation Power Flow ExampleDocument7 pagesContinuation Power Flow ExampleSudheerKumarNo ratings yet
- Solving Ordinary Differential Equations With MatlabDocument22 pagesSolving Ordinary Differential Equations With MatlabMario ZamoraNo ratings yet
- Lec23 Semidef OptDocument54 pagesLec23 Semidef OptSudheerKumarNo ratings yet
- Lec4 Quad FormDocument18 pagesLec4 Quad FormSudheerKumarNo ratings yet
- Lec9 Project MTHDDocument14 pagesLec9 Project MTHDSudheerKumarNo ratings yet
- Lec1 Unconstr OptDocument18 pagesLec1 Unconstr OptBittu KriNo ratings yet
- Mobil DTE 20 Series - Marketing Asset - Display & POS Support Material - Performance ProfileDocument2 pagesMobil DTE 20 Series - Marketing Asset - Display & POS Support Material - Performance Profilethammarat khruasonkhamNo ratings yet
- Hyundai Heavy Industries - Gas Insulated SwitchgearDocument25 pagesHyundai Heavy Industries - Gas Insulated SwitchgearbadbenzationNo ratings yet
- Carte Tehnica Excavator VolvoDocument12 pagesCarte Tehnica Excavator VolvoCiufudean AdrianNo ratings yet
- Autovue IntegrationDocument4 pagesAutovue IntegrationmansrallyNo ratings yet
- TTO-ST-0-SPC-05100 - Structural Steel SpecificationDocument18 pagesTTO-ST-0-SPC-05100 - Structural Steel Specificationsara saravananNo ratings yet
- O&M TransformerDocument47 pagesO&M TransformerAshish PatelNo ratings yet
- Cryogenic and Its ApplicationDocument11 pagesCryogenic and Its ApplicationBhoomika MansharamaniNo ratings yet
- Android Notes by KillerDocument6 pagesAndroid Notes by KillerRavi RanjanNo ratings yet
- Fastening SystemsDocument74 pagesFastening SystemsskyvaneNo ratings yet
- Brige Lauching Cap 1 PDFDocument16 pagesBrige Lauching Cap 1 PDFAnonymous VkzquW39No ratings yet
- Column Marking For G+4 Hostel Building: All Dimensions Are in MeterDocument1 pageColumn Marking For G+4 Hostel Building: All Dimensions Are in Metergowtham gowdaNo ratings yet
- Biogas Technology: Construction, Utilization and Operation ManualDocument52 pagesBiogas Technology: Construction, Utilization and Operation ManualDwi Cahyo NugrohoNo ratings yet
- 5209 Aerospace T SealDocument20 pages5209 Aerospace T SealNicolasSuchNo ratings yet
- Remote Log-In, Electronic Mail and File Transfer: Solutions To Odd-Numbered Review Questions and ExercisesDocument2 pagesRemote Log-In, Electronic Mail and File Transfer: Solutions To Odd-Numbered Review Questions and ExercisesAnurag UpadhyayNo ratings yet
- B Indice F400 EDocument8 pagesB Indice F400 EIslam ShoukryNo ratings yet
- Implifier PanssonicDocument5 pagesImplifier PanssonicSergs LluismaNo ratings yet
- Connections For Hydraulic Fluid Power and General Use - Hose FittingsDocument22 pagesConnections For Hydraulic Fluid Power and General Use - Hose FittingsОлег СоловьевNo ratings yet
- Valve PagesDocument5 pagesValve PagesJoyal ThomasNo ratings yet
- Pic Attack1Document13 pagesPic Attack1celiaescaNo ratings yet
- 240-109607332 Eskom Plant Labelling Abbreviation StandardDocument638 pages240-109607332 Eskom Plant Labelling Abbreviation StandardiabhuaNo ratings yet
- Delphi Client ServerDocument9 pagesDelphi Client Serverlukgv,hNo ratings yet
- Shear Key PDFDocument3 pagesShear Key PDFBijaya RaulaNo ratings yet
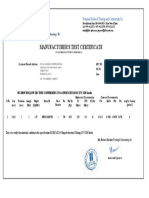
- Manufacturer'S Test Certificate: National Builtech Trading and Contracting CoDocument1 pageManufacturer'S Test Certificate: National Builtech Trading and Contracting CoQc QatarNo ratings yet
- LCD TV: Service ManualDocument74 pagesLCD TV: Service Manualismosch50% (2)
- TCP IP CompleteDocument167 pagesTCP IP Completereddyhell99No ratings yet
- College ManagementDocument58 pagesCollege Managementforum502No ratings yet
- Const Estimate Made EasyDocument31 pagesConst Estimate Made EasyLorenzo SerranoNo ratings yet