You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Harmony Guide DatabaseDocument7 pagesHarmony Guide DatabaseAya SakamotoNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Proposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. ArchDocument7 pagesProposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. Archpepito manalotoNo ratings yet
- FhryhfhfhDocument3 pagesFhryhfhfhAffan AhmadNo ratings yet
- The Role of Needs Analysis in Adult ESL Programme Design: Geoffrey BrindleyDocument16 pagesThe Role of Needs Analysis in Adult ESL Programme Design: Geoffrey Brindleydeise krieser100% (2)
- Climatol GuideDocument40 pagesClimatol GuideFressiaNo ratings yet
- Non-Emulsifying Agent W54Document12 pagesNon-Emulsifying Agent W54Pranav DubeyNo ratings yet
- Course Outline Principles of MarketingDocument3 pagesCourse Outline Principles of MarketingKhate Tria De LeonNo ratings yet
- Barack ObamaDocument3 pagesBarack ObamaVijay KumarNo ratings yet
- Sai Deepa Rock Drills: Unless Otherwise Specified ToleranceDocument1 pageSai Deepa Rock Drills: Unless Otherwise Specified ToleranceRavi BabaladiNo ratings yet
- TIB Bwpluginrestjson 2.1.0 ReadmeDocument2 pagesTIB Bwpluginrestjson 2.1.0 ReadmemarcmariehenriNo ratings yet
- Jungles & SavannasDocument80 pagesJungles & SavannasJessica100% (1)
- Formula Renault20 Mod00Document68 pagesFormula Renault20 Mod00Scuderia MalatestaNo ratings yet
- Question BankDocument3 pagesQuestion BankHimanshu SharmaNo ratings yet
- Analysis of Green Entrepreneurship Practices in IndiaDocument5 pagesAnalysis of Green Entrepreneurship Practices in IndiaK SrivarunNo ratings yet
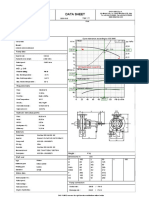
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Document3 pagesData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaNo ratings yet
- Static Power Conversion I: EEE-463 Lecture NotesDocument48 pagesStatic Power Conversion I: EEE-463 Lecture NotesErgin ÖzdikicioğluNo ratings yet
- On The Importance of Learning Statistics For Psychology StudentsDocument2 pagesOn The Importance of Learning Statistics For Psychology StudentsMadison HartfieldNo ratings yet
- 【SIEMENS】Cios Spin-FlyerDocument8 pages【SIEMENS】Cios Spin-FlyerAshleyNo ratings yet
- ANSI AAMI ST63 2002 - Sterilization of Healthcare Products - Dry HeatDocument54 pagesANSI AAMI ST63 2002 - Sterilization of Healthcare Products - Dry HeatGraciane TagliettiNo ratings yet
- Abstract Cohort 1 Clin Psych FZ 20220323Document31 pagesAbstract Cohort 1 Clin Psych FZ 20220323Azizah OthmanNo ratings yet
- Electromechani Cal System: Chapter 2: Motor Control ComponentsDocument35 pagesElectromechani Cal System: Chapter 2: Motor Control ComponentsReynalene PanaliganNo ratings yet
- Surge Arrester PresentationDocument63 pagesSurge Arrester PresentationRamiro FelicianoNo ratings yet
- Contoh Label Sensus 2022Document313 pagesContoh Label Sensus 2022Ajenk SablackNo ratings yet
- Feasibility and Optimization of Dissimilar Laser Welding ComponentsDocument366 pagesFeasibility and Optimization of Dissimilar Laser Welding Componentskaliappan45490No ratings yet
- Technical Test 03Document13 pagesTechnical Test 03KartikNo ratings yet
- Apps Android StudioDocument12 pagesApps Android StudioDaniel AlcocerNo ratings yet
- The Logic of Repetition: A Guide To Trading, Thinking, and The Cycles of LifeDocument10 pagesThe Logic of Repetition: A Guide To Trading, Thinking, and The Cycles of LifeRaghvendra kNo ratings yet
- Integration Plan Grade 9 Mapeh SeptemberDocument3 pagesIntegration Plan Grade 9 Mapeh Septemberbernie evaristo bacsaNo ratings yet
- He Sas 23Document10 pagesHe Sas 23Hoorise NShineNo ratings yet
- Pressure-Dependent Leak Detection Model and Its Application To A District Water SystemDocument13 pagesPressure-Dependent Leak Detection Model and Its Application To A District Water SystemManjul KothariNo ratings yet