You might also like
- Especificaciones Tecnicas Scorbot ER-9 (Ok)Document4 pagesEspecificaciones Tecnicas Scorbot ER-9 (Ok)Yilmer MachaccaNo ratings yet
- Especificaciones Tecnicas Scorbot ER-14 (TRADUCCION OK)Document5 pagesEspecificaciones Tecnicas Scorbot ER-14 (TRADUCCION OK)Yilmer MachaccaNo ratings yet
- SenaDocument4 pagesSenakmius95No ratings yet
- QuizBean - Quickly Create Online Quizzes For Free1Document6 pagesQuizBean - Quickly Create Online Quizzes For Free1jesus muzoNo ratings yet
- Ficha Técnica Dell Inspiron 3420Document5 pagesFicha Técnica Dell Inspiron 3420Alexander BermúdezNo ratings yet
- Datos Técnicos de Robots Manipuladores IndustrialesDocument3 pagesDatos Técnicos de Robots Manipuladores IndustrialesLola Lopez100% (1)
- Maquina Medidoras de CablesDocument6 pagesMaquina Medidoras de CablesWalterNo ratings yet
- Sistemas y Subsistemas de Las Motocicletas y Motocarros EntregarDocument6 pagesSistemas y Subsistemas de Las Motocicletas y Motocarros EntregarAndres Camilo Gil GomezNo ratings yet
- Motor Paso A Paso Ajustado A GradosDocument3 pagesMotor Paso A Paso Ajustado A Gradosjuanjo goNo ratings yet
- Kuka KR6 R900Document41 pagesKuka KR6 R900LUIS ALBERTO AYRA ROMERO100% (1)
- Proyecto Robot Seguidor de Linea PDFDocument11 pagesProyecto Robot Seguidor de Linea PDFrapzosNo ratings yet
- Practica 2 Control DepositoDocument4 pagesPractica 2 Control Depositomarc menesesNo ratings yet
- Ficha Tecnica-10601086Document3 pagesFicha Tecnica-10601086LIMBERTH VELANo ratings yet
- Control en Cascada Del Motor DCDocument8 pagesControl en Cascada Del Motor DCnegritilloomarNo ratings yet
- Actividad 1 ElectricidadDocument6 pagesActividad 1 ElectricidadJennifer GuamanNo ratings yet
- Cs 5.1.4.3 JaviercamposcrisostomoDocument10 pagesCs 5.1.4.3 JaviercamposcrisostomoJhonja CamposNo ratings yet
- Aplicaciones Robóticas IndustrialesDocument4 pagesAplicaciones Robóticas IndustrialesAndy SalanNo ratings yet
- Mate Matic AsDocument43 pagesMate Matic AsCeSaar AlaRcon50% (2)
- Ejercicios Con Circuitos en Serie y ParaleloDocument2 pagesEjercicios Con Circuitos en Serie y ParaleloAngel CarrilloNo ratings yet
- Exposicion MicrocontroladoresDocument33 pagesExposicion MicrocontroladoresRosita Mtz SNo ratings yet
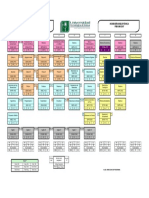
- Pensum Ing Mecatronica-2007 de La UtbDocument1 pagePensum Ing Mecatronica-2007 de La UtbJesu Funez Genes100% (1)
- Scorbot-ER VDocument6 pagesScorbot-ER VDanilo Alfonso Rojas MendezNo ratings yet
- Caracteristicas Robot-2c Controlador y Teach Box PDFDocument8 pagesCaracteristicas Robot-2c Controlador y Teach Box PDFJohn VH100% (1)
- Simbologia NeumaticaDocument5 pagesSimbologia NeumaticaXavi Redondo100% (1)
- Ejemplo de Regulación Práctica de Relé Térmico en Un Motor EléctricoDocument5 pagesEjemplo de Regulación Práctica de Relé Térmico en Un Motor EléctricoChester Noel Brenes AguirreNo ratings yet
- Análisis de Bode de Integradores en CascadaDocument8 pagesAnálisis de Bode de Integradores en CascadaRicardo DiazNo ratings yet
- 1 Tema 1 Diseño de Herramientas ManualesDocument48 pages1 Tema 1 Diseño de Herramientas ManualesAbraham NuñezNo ratings yet
- 1 Actividad Coord. TsaDocument11 pages1 Actividad Coord. TsawhiteNo ratings yet
- Programa CAEDocument3 pagesPrograma CAESaul Camacho IbarraNo ratings yet
- Go KartDocument3 pagesGo KartErick SalmonesNo ratings yet
- Semana 10 Operaciones Básicas-Tipos de Datos en LabVIEWDocument6 pagesSemana 10 Operaciones Básicas-Tipos de Datos en LabVIEWMartin ContrerasNo ratings yet
- Taller 7 Caracterizar Los Sistemas Electrónicos de La InstrumentaciónDocument3 pagesTaller 7 Caracterizar Los Sistemas Electrónicos de La InstrumentaciónJhoan SanchezNo ratings yet
- Seguidor de Línea (Informe)Document12 pagesSeguidor de Línea (Informe)DanyJavier55% (11)
- Taller 1 Elementos Maquinas Poleas Con Correa PDFDocument2 pagesTaller 1 Elementos Maquinas Poleas Con Correa PDFDavid Florez0% (1)
- Clasificacion de Los Sistemas TransporteDocument2 pagesClasificacion de Los Sistemas TransporteJohan Hernán60% (5)
- Calibradores Vernier Dibujo TecnicoDocument18 pagesCalibradores Vernier Dibujo Tecnicoconfigura2No ratings yet
- IEE2683 Guia Robotica SimulacionDocument15 pagesIEE2683 Guia Robotica SimulacionSimon AguileraNo ratings yet
- Filtros-Activos Exposicion GrupoDocument59 pagesFiltros-Activos Exposicion GrupoJorge ParraNo ratings yet
- Circuladores OpticosDocument5 pagesCirculadores OpticosJeffrey ArchboldNo ratings yet
- T568ADocument3 pagesT568AAaron Yovera RamosNo ratings yet
- Ejercicios Kosmo CatastroDocument75 pagesEjercicios Kosmo CatastroBenjamín ChamorroNo ratings yet
- Indicador Arian Id 20Document33 pagesIndicador Arian Id 20NiCkNo ratings yet
- Sohdm Trabajo FinalDocument46 pagesSohdm Trabajo FinalYaneth HuamanNo ratings yet
- Qué Es Un Circuito AnalógicoDocument13 pagesQué Es Un Circuito AnalógicoEdmaryRojas100% (1)
- Definicion MatlabDocument3 pagesDefinicion MatlabdasfdsfsdfNo ratings yet
- Vision General RoboticaDocument45 pagesVision General Roboticadeyvi_is1064No ratings yet
- Taller SenaDocument5 pagesTaller SenaJuancho Bravo100% (1)
- INFORME IEEE - Mediciones de MedidasDocument5 pagesINFORME IEEE - Mediciones de MedidasAndres240% (1)
- Fauna de Juchi TanDocument5 pagesFauna de Juchi TanAngel GarciaNo ratings yet
- Informe TecnicoDocument15 pagesInforme TecnicoC CNo ratings yet
- Masas Patron ResumenDocument2 pagesMasas Patron Resumencamila65No ratings yet
- 1 Sierra CintaDocument5 pages1 Sierra CintaNANCY AGUIRRE GIRALDONo ratings yet
- Capitulo 8 Resumen Introducción A La TGSDocument1 pageCapitulo 8 Resumen Introducción A La TGSYessenia Gajardo FicaNo ratings yet
- Configuracion MonoestableDocument43 pagesConfiguracion MonoestableJihnmar Joel Mancco CunyasNo ratings yet
- Sensor Q85vr3dl-T9-BannerDocument3 pagesSensor Q85vr3dl-T9-Bannermackito10100% (1)
- Cinematica y Dinamica Del Un Seguidor de LineaDocument10 pagesCinematica y Dinamica Del Un Seguidor de LineaDiana ArciniegasNo ratings yet
- Trabajo Del Servicio SocialDocument21 pagesTrabajo Del Servicio SocialAlfonso CruzNo ratings yet
- Celula de MecanizadoDocument12 pagesCelula de MecanizadoVictor EspinosaNo ratings yet
- Caracteriticas RobotDocument6 pagesCaracteriticas RobotAnonymous 125xJQNo ratings yet
- Practica #1: Escuela Superior Politecnica Del Litoral Facultad de Ingenieria en Electricidad Y ComputacionDocument19 pagesPractica #1: Escuela Superior Politecnica Del Litoral Facultad de Ingenieria en Electricidad Y ComputacionAlex Guamán EspinozaNo ratings yet
- Historia de Motor OttoDocument7 pagesHistoria de Motor OttoErica RobinsonNo ratings yet
- Motores Diesel FuncionamientoDocument12 pagesMotores Diesel FuncionamientoAndres Phun100% (1)
- Motor OttoDocument17 pagesMotor OttoErica Robinson100% (1)
- Fundamento Del Diseño OrganizacionalDocument5 pagesFundamento Del Diseño OrganizacionalErica RobinsonNo ratings yet
- Fundamento Del Diseño OrganizacionalDocument5 pagesFundamento Del Diseño OrganizacionalErica RobinsonNo ratings yet
- Trabajo de Identificacion de Codigo de Colores en ProlonDocument9 pagesTrabajo de Identificacion de Codigo de Colores en ProlonSantos BustinzaNo ratings yet
- Diseño y Simulación Mediante PROTEUS ISIS de Un Control PID en Un Sistema de CalefacciónDocument12 pagesDiseño y Simulación Mediante PROTEUS ISIS de Un Control PID en Un Sistema de CalefacciónErica RobinsonNo ratings yet
- Diseño y Simulación Mediante PROTEUS ISIS de Un Control PID en Un Sistema de CalefacciónDocument12 pagesDiseño y Simulación Mediante PROTEUS ISIS de Un Control PID en Un Sistema de CalefacciónErica RobinsonNo ratings yet
- 7 Trabajo Final Und 3 Contabilidad GeneralDocument2 pages7 Trabajo Final Und 3 Contabilidad GeneralJosé SolorzanoNo ratings yet
- Micro Curriculo Dibujo de IngenieriaDocument5 pagesMicro Curriculo Dibujo de IngenieriaKatty GonzalezNo ratings yet
- Taller6MariaDB 926405eeab574f3Document9 pagesTaller6MariaDB 926405eeab574f3Fernando RojasNo ratings yet
- LAQUA1000 CatálogoDocument16 pagesLAQUA1000 CatálogomiltonerazoalvNo ratings yet
- Xdoc - MX Omega Un Sistema Mejorado de Texaco para La Mezcla de GasolinaDocument10 pagesXdoc - MX Omega Un Sistema Mejorado de Texaco para La Mezcla de GasolinaLitman RSNo ratings yet
- Latinum InstruccionesDocument8 pagesLatinum Instruccionespmug0001No ratings yet
- Catalogo PL 50Document24 pagesCatalogo PL 50Fernando AlegriaNo ratings yet
- Plan Curricular SistemasDocument2 pagesPlan Curricular SistemasJose EstradaNo ratings yet
- Camara Vivotek IP8161Document11 pagesCamara Vivotek IP8161TecnoSmartNo ratings yet
- PLAN DE CLASE DECIMO 4a SEMANADocument2 pagesPLAN DE CLASE DECIMO 4a SEMANAjohana gonzalesNo ratings yet
- PUNTO ABSTRACTO Gumiel Laura Abner GabrielDocument8 pagesPUNTO ABSTRACTO Gumiel Laura Abner GabrielAbnerGabriel GumielLauraNo ratings yet
- Las 8 Fases de Una Compra E-CommerceDocument1 pageLas 8 Fases de Una Compra E-CommerceSidu-PNo ratings yet
- Apuntes de Introduccion A La ComputacionDocument3 pagesApuntes de Introduccion A La ComputacionDylan Crespo SuarezNo ratings yet
- Tarea Semana 03-TutoriaDocument10 pagesTarea Semana 03-TutoriaEMILIANA DEL PILAR ENEQUE GAMARRANo ratings yet
- Computer Hoy #406 - 25 de Abril de 2014Document68 pagesComputer Hoy #406 - 25 de Abril de 2014Jacko BillyNo ratings yet
- Historia de La CpmputadoraDocument2 pagesHistoria de La CpmputadoraSamy GarcíaNo ratings yet
- Instalación de Un Servidor Xampp en Una Maquina Virtual LinuxDocument9 pagesInstalación de Un Servidor Xampp en Una Maquina Virtual LinuxSoniaFernandezSapenaNo ratings yet
- Presentacion Del Uso Del Equipo MTO de MeggerDocument24 pagesPresentacion Del Uso Del Equipo MTO de MeggerCris PolNo ratings yet
- Guía Rápida PadletDocument10 pagesGuía Rápida Padleteduardo garinNo ratings yet
- EKAHAU - Starting Guide - Ed02Document22 pagesEKAHAU - Starting Guide - Ed02ferneyNo ratings yet
- Electricidad Automotriz 12Document77 pagesElectricidad Automotriz 12daniel larrea vasconezNo ratings yet
- Proyecto Ejecutivo Evacuacion El Burgo IDocument175 pagesProyecto Ejecutivo Evacuacion El Burgo IANGEL LOPEZ CORONNo ratings yet
- 5G y Tipo de Estaciones BaseDocument6 pages5G y Tipo de Estaciones BaseCesar ccorahua espillcoNo ratings yet
- Conalux Led Tarifa 10 2022 Baja 1Document444 pagesConalux Led Tarifa 10 2022 Baja 1Antonio Vergara RuizNo ratings yet
- Tesis. Jorge D. Chavez. G.Document13 pagesTesis. Jorge D. Chavez. G.Jorge Daniel Chavez GonzalezNo ratings yet
- Base de Datos en AccessDocument12 pagesBase de Datos en AccessFranklin MendezNo ratings yet
- COMPROBANTESDocument30 pagesCOMPROBANTESBarajas ChavezNo ratings yet
- Pregunta 1, 2 y 3 Examen Parcial AutomatizaciónDocument10 pagesPregunta 1, 2 y 3 Examen Parcial AutomatizaciónCARLOS DANIEL HUAMAN QUISPENo ratings yet
- 1275Document24 pages1275thuanderNo ratings yet
- Trabajo FinalDocument9 pagesTrabajo FinalRoberto Carlos Vencis EspinozaNo ratings yet