You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- ENV 13670-1-2000 Execution of Concrete StructuresDocument64 pagesENV 13670-1-2000 Execution of Concrete Structuressofronije200590% (10)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Motor CAT C13 AcertDocument3 pagesMotor CAT C13 AcertJosé Gonzalez100% (4)
- Commentary and Worked Examples To en 1993-1-5 Plated Structural ElementsDocument242 pagesCommentary and Worked Examples To en 1993-1-5 Plated Structural ElementsMaris VeitsNo ratings yet
- Commentary and Worked Examples To en 1993-1-5 Plated Structural ElementsDocument242 pagesCommentary and Worked Examples To en 1993-1-5 Plated Structural ElementsMaris VeitsNo ratings yet
- Guidebook-2 Design of BridgesDocument232 pagesGuidebook-2 Design of BridgesVERUSH13100% (2)
- Methods of Analysis of Piled Raft Foundations - H.G. PoulosDocument46 pagesMethods of Analysis of Piled Raft Foundations - H.G. PoulosMuhammad Yunus100% (10)
- 14 528Lecture6-GroupandLateralAnalysesDocument47 pages14 528Lecture6-GroupandLateralAnalysesSuhas JoshiNo ratings yet
- MioPocket ReadmeDocument30 pagesMioPocket Readmelion78No ratings yet
- NA Topic 2 Bridge Design Seminar Colombo March 2016Document152 pagesNA Topic 2 Bridge Design Seminar Colombo March 2016alex abrhaNo ratings yet
- Hydraulic Cylinders English Metric E329e - v4 PDFDocument67 pagesHydraulic Cylinders English Metric E329e - v4 PDFsofronije2005No ratings yet
- MAURER Elastomeric Bearings PDFDocument13 pagesMAURER Elastomeric Bearings PDFIrma HasanahNo ratings yet
- PDFDocument9 pagesPDFandre redobleNo ratings yet
- NR 30951Document226 pagesNR 30951sofronije2005No ratings yet
- GE July 1976 - Foundations and Earthworks For Cylindrical Steel Storage TanksDocument6 pagesGE July 1976 - Foundations and Earthworks For Cylindrical Steel Storage Tankssofronije2005No ratings yet
- Nokia Asha 300 User GuideDocument56 pagesNokia Asha 300 User GuideKamdan 'Abu Kalvinda' KurniawanNo ratings yet
- Technical PaperDocument9 pagesTechnical Papersofronije2005No ratings yet
- Epfl TH5575 PDFDocument188 pagesEpfl TH5575 PDFsofronije2005No ratings yet
- HMT Dome Presentation GenericDocument12 pagesHMT Dome Presentation Genericsofronije2005No ratings yet
- Full TextDocument15 pagesFull TextSaulo Marcondes de MouraNo ratings yet
- WF Sections Cisc 1967Document14 pagesWF Sections Cisc 1967sarrivisNo ratings yet
- Probabilistic Seismic Hazard Assessment For Albania, Macedonia and SerbiaDocument10 pagesProbabilistic Seismic Hazard Assessment For Albania, Macedonia and Serbiasofronije2005100% (1)
- Settlement of Piled FoundationsDocument24 pagesSettlement of Piled FoundationsWubetie MengistNo ratings yet
- Provia BrochureDocument8 pagesProvia Brochuresofronije2005No ratings yet
- GE July 1976 - Foundations and Earthworks For Cylindrical Steel Storage TanksDocument6 pagesGE July 1976 - Foundations and Earthworks For Cylindrical Steel Storage Tankssofronije2005No ratings yet
- Randolph - McClelland Lecture - Powerpoint SlidesDocument34 pagesRandolph - McClelland Lecture - Powerpoint Slidessofronije2005No ratings yet
- Broms Method From Reese BookDocument15 pagesBroms Method From Reese BookMauricio Segovia JilabertNo ratings yet
- Handbook 4 BridgeDocument174 pagesHandbook 4 BridgeVlad MihaiNo ratings yet
- Evaluation of Static Cap..Document43 pagesEvaluation of Static Cap..sofronije2005No ratings yet
- Testi I Konit Ne PilotaDocument115 pagesTesti I Konit Ne PilotaRajmonda RamaNo ratings yet
- RahullDocument5 pagesRahullsofronije2005No ratings yet
- Earth Pressures Against and Stability of Retaining - StructuresDocument200 pagesEarth Pressures Against and Stability of Retaining - StructuresIon PusculitaNo ratings yet
- Lecture 5 FoundationsDocument44 pagesLecture 5 Foundationsbeddows_sNo ratings yet
- PAG7.1 Student The Effects of Antibiotics On Microbial Growth - v0.3Document3 pagesPAG7.1 Student The Effects of Antibiotics On Microbial Growth - v0.3Habib UddinNo ratings yet
- ST 36Document4 pagesST 36ray72roNo ratings yet
- Greater Occipital Nerve Block: Pain ManagementDocument3 pagesGreater Occipital Nerve Block: Pain Managementkillingeyes177No ratings yet
- HMT RM65 Radial DrillDocument2 pagesHMT RM65 Radial Drillsomnath213No ratings yet
- Unit 2 - Presentations (Image, Impact and Making An Impression) 2Document25 pagesUnit 2 - Presentations (Image, Impact and Making An Impression) 2LK Chiarra Panaligan100% (1)
- Properties of Matter ReviewDocument8 pagesProperties of Matter Reviewapi-290100812No ratings yet
- Communication Guide: For Vita 62 Compliant VPX Power SuppliesDocument8 pagesCommunication Guide: For Vita 62 Compliant VPX Power Suppliesk.saikumarNo ratings yet
- Rankine-Hugoniot Curve: CJ: Chapman JouguetDocument6 pagesRankine-Hugoniot Curve: CJ: Chapman Jouguetrattan5No ratings yet
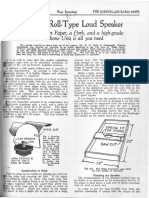
- Simple Roll-Type: A Loud SpeakerDocument1 pageSimple Roll-Type: A Loud SpeakerEudes SilvaNo ratings yet
- Sudip Praposal - 1Document20 pagesSudip Praposal - 1Usha BbattaNo ratings yet
- LighthouseDocument4 pagesLighthousejaneborn5345No ratings yet
- Latihan To: Nilai: 7.4 Benar: 37 Salah: 13Document17 pagesLatihan To: Nilai: 7.4 Benar: 37 Salah: 13glensNo ratings yet
- Hazard Assessment For PPE - XX-DRAFTDocument4 pagesHazard Assessment For PPE - XX-DRAFTWayne VanderhoofNo ratings yet
- Abdominal Examination OSCE GuideDocument30 pagesAbdominal Examination OSCE Guideزياد سعيدNo ratings yet
- Project Title Discipline Project Stage Client Attendance CirculationDocument4 pagesProject Title Discipline Project Stage Client Attendance CirculationgregNo ratings yet
- LPG GasDocument39 pagesLPG Gasv prasanthNo ratings yet
- (G. Lakshmi Narasaiah) Finite Element Analysis PDFDocument349 pages(G. Lakshmi Narasaiah) Finite Element Analysis PDFmoljaime1326No ratings yet
- A Tired BrainDocument3 pagesA Tired BrainSivasonNo ratings yet
- Aluminium Alloy - Wikipedia, The Free EncyclopediaDocument12 pagesAluminium Alloy - Wikipedia, The Free EncyclopediaAshishJoshi100% (1)
- SP 73Document105 pagesSP 73Rodrigo Vilanova100% (3)
- HY-TB3DV-M 3axis Driver PDFDocument10 pagesHY-TB3DV-M 3axis Driver PDFjoelgcrNo ratings yet
- Solid Modeling Techniques: Constructive Solid Geometry (CSG)Document22 pagesSolid Modeling Techniques: Constructive Solid Geometry (CSG)amolNo ratings yet
- Killer Kohler Part I IDocument17 pagesKiller Kohler Part I Irusyn100% (1)
- Relationsh Between EM and Young S ModuliDocument7 pagesRelationsh Between EM and Young S ModuliDwight AndersonNo ratings yet
- Ventricular Septal DefectDocument9 pagesVentricular Septal DefectpepotchNo ratings yet
- Intumescent Paint For Steel NZ - Coating - Co.nzDocument8 pagesIntumescent Paint For Steel NZ - Coating - Co.nzPeter ThomsonNo ratings yet
- Dialog Bahasa InggirsDocument2 pagesDialog Bahasa InggirsKeRtha NeghaRaNo ratings yet