You might also like
- Resumen Mitos Griegos Mary Pope OsborneDocument5 pagesResumen Mitos Griegos Mary Pope Osbornetrespollitos64% (137)
- El Encuentro de Dos MundosDocument2 pagesEl Encuentro de Dos MundosMoises Tordoya88% (8)
- Manual de Organizacion NuevoDocument40 pagesManual de Organizacion NuevoGabriela Medina Solano71% (58)
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)From EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Rating: 2 out of 5 stars2/5 (1)
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311From EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Rating: 2 out of 5 stars2/5 (1)
- PruebaLibro Mamire El Ultimo NiñoDocument4 pagesPruebaLibro Mamire El Ultimo NiñoLorenzoCortezAraya100% (2)
- Modos de ControlDocument25 pagesModos de Controlzirtep57% (7)
- Los Demonios y Sus Rangos LeviatanDocument31 pagesLos Demonios y Sus Rangos LeviatanDelvis Leon100% (11)
- Mitología Sumeria PDFDocument25 pagesMitología Sumeria PDFManuel Historia100% (3)
- Unidad 4 Control ClasicoDocument10 pagesUnidad 4 Control ClasicoOmarNo ratings yet
- Unidad 4 Ing. ControlDocument11 pagesUnidad 4 Ing. Controlhector quiroz garciaNo ratings yet
- Acciones Basicos de ControlDocument21 pagesAcciones Basicos de ControlFer AvilaNo ratings yet
- Acciones Básicas de Control y Respuestas de Los SistemasDocument36 pagesAcciones Básicas de Control y Respuestas de Los SistemasCristian Velasquez Peña100% (1)
- Acción de Dos PosicionesDocument9 pagesAcción de Dos PosicionesAngel BelloNo ratings yet
- Acciones Basicas de ControlDocument19 pagesAcciones Basicas de ControlAnival Toribio Ortiz GonzalezNo ratings yet
- Investigación Unidad 4 InstrumentacionDocument27 pagesInvestigación Unidad 4 InstrumentacionDanna LopezNo ratings yet
- Control de Temperatura Proporcional Micrologix 1000Document13 pagesControl de Temperatura Proporcional Micrologix 1000serolfitnas100% (2)
- Acciones Básicas de Sistemas de ControlDocument25 pagesAcciones Básicas de Sistemas de ControlRalph MarietteNo ratings yet
- 1UNIDAD 4 Acciones Básicas de Control.11Document40 pages1UNIDAD 4 Acciones Básicas de Control.11ricardobarajasNo ratings yet
- Unidad 4 Ing - Control ClasicoDocument41 pagesUnidad 4 Ing - Control ClasicoJORGESOLANOIEM100% (3)
- Unidad 4 ControladoresDocument18 pagesUnidad 4 ControladoresGlobos LugrimNo ratings yet
- Control PIDDocument65 pagesControl PIDChristian OqNo ratings yet
- Unidad 4-Acciones Basicas de ControlDocument20 pagesUnidad 4-Acciones Basicas de ControlcontrolclasicoiemNo ratings yet
- Acciones Basicas de ControlDocument20 pagesAcciones Basicas de ControlrichardlivNo ratings yet
- Laboratorio 2 - Controladores de ProcesosDocument6 pagesLaboratorio 2 - Controladores de Procesosgeiner peraltaNo ratings yet
- UNIDAD 4 Acciones Basicas de ControlDocument20 pagesUNIDAD 4 Acciones Basicas de ControlricardobarajasNo ratings yet
- Tipos de Acción de ControlDocument4 pagesTipos de Acción de ControlLeoger Jesús Villamizar RamosNo ratings yet
- Ingeniería de Control IdDocument27 pagesIngeniería de Control IdRony Ynoquio RosalesNo ratings yet
- Controladores 2Document87 pagesControladores 2lindafioNo ratings yet
- Control AdoresDocument10 pagesControl AdoresAngélica Rodríguez CarrascoNo ratings yet
- Lazo Cerrado Seguidor de LuzDocument5 pagesLazo Cerrado Seguidor de LuzDanNo ratings yet
- Proyecto de Control AnalogoDocument24 pagesProyecto de Control AnalogoMónik TelloNo ratings yet
- ControladoresDocument32 pagesControladoresKelvin MartínezNo ratings yet
- Control Analógico de Posición de Motor DCDocument5 pagesControl Analógico de Posición de Motor DCBryan Samos AlbornozNo ratings yet
- Laboratorio de Instrumentacion y ControlDocument16 pagesLaboratorio de Instrumentacion y ControlUriel CeballosNo ratings yet
- Acciones Basicas de Control y ControladoresDocument15 pagesAcciones Basicas de Control y ControladoresSofia GomezNo ratings yet
- Unidad 4 Acciones Bc3a1sicas de ControlDocument37 pagesUnidad 4 Acciones Bc3a1sicas de ControlDaniel Eduardo JrzNo ratings yet
- Aplicacion Sistemas de Control - PidDocument38 pagesAplicacion Sistemas de Control - PidKevinGuerreroNo ratings yet
- CTRL P Pi PidDocument16 pagesCTRL P Pi PidJoan Sebastian Ortiz TrujequeNo ratings yet
- Informe Examen FinalDocument15 pagesInforme Examen FinalGustavo CeccarelliNo ratings yet
- Lab 12Document17 pagesLab 12richard ccahuana laymeNo ratings yet
- CONTROLADORES y Acciones de ControlDocument8 pagesCONTROLADORES y Acciones de ControlHaide GarciaNo ratings yet
- Acciones Básicas de ControlDocument13 pagesAcciones Básicas de ControljavichapNo ratings yet
- Tipos de ControladoresDocument10 pagesTipos de Controladoresefec7267% (9)
- Practica Control On OffDocument5 pagesPractica Control On OffAlex MendozaNo ratings yet
- Tema 67Document12 pagesTema 67Beatriz San José SecoNo ratings yet
- Libro Servos SL 2017Document271 pagesLibro Servos SL 2017edgarjairNo ratings yet
- PDF Reporte de Investigacion Unidad 4 ControladoresDocument16 pagesPDF Reporte de Investigacion Unidad 4 ControladoresRicardo Hernandez bustosNo ratings yet
- Control de Posicion Motor - ElectronicaDocument5 pagesControl de Posicion Motor - ElectronicaErick Stanley Arevalo LopezNo ratings yet
- Qué Es Control - MergedDocument74 pagesQué Es Control - Mergedjhon.simba2014No ratings yet
- Guia 7Document15 pagesGuia 7FabianBañoNo ratings yet
- Unidad 1Document4 pagesUnidad 1Genaro ortega aguirreNo ratings yet
- Electronica CatDocument41 pagesElectronica CatConfiequipos Administración100% (1)
- U4. Control ClásicoDocument19 pagesU4. Control ClásicoJose Alfredo Morales GonzalezNo ratings yet
- 4Document14 pages4Rosvit De la CruzNo ratings yet
- Esquema de MandoDocument7 pagesEsquema de MandozujeidisandreaNo ratings yet
- ManriqueDocument6 pagesManriqueJose Yair Chuc ZapataNo ratings yet
- Apuntes ControladoresDocument7 pagesApuntes ControladoresDiego Fragoso SalinasNo ratings yet
- Modos de ControlDocument12 pagesModos de ControlAnonymous qjfLLSHo100% (1)
- Informe 1 Instrumentación y Control de ProcesosDocument13 pagesInforme 1 Instrumentación y Control de ProcesosKenny SalazarNo ratings yet
- Automatizacion Industrial Exposicion Unidad 4Document10 pagesAutomatizacion Industrial Exposicion Unidad 4Felipe R RodriguezNo ratings yet
- Cap 02Document57 pagesCap 02enmanuel fernandezNo ratings yet
- Tema LazosDocument9 pagesTema LazosFërnändä ToäquïzäNo ratings yet
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311From EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Rating: 4.5 out of 5 stars4.5/5 (2)
- Metodolgia Cad CamDocument3 pagesMetodolgia Cad CamKatty PintoNo ratings yet
- Respuesta en El Tiempo de Sistemas de Control en Tiempo DiscretoDocument2 pagesRespuesta en El Tiempo de Sistemas de Control en Tiempo DiscretoKatty PintoNo ratings yet
- Ensayo - Viaje Del Presidente A ChinaDocument3 pagesEnsayo - Viaje Del Presidente A ChinaKatty PintoNo ratings yet
- Informe Final PID LuminosidadDocument19 pagesInforme Final PID LuminosidadKatty PintoNo ratings yet
- Diseño Mecatrónico Ciclo de Vida de Un ProductoDocument1 pageDiseño Mecatrónico Ciclo de Vida de Un ProductoKatty PintoNo ratings yet
- Tipos de RimasDocument4 pagesTipos de RimasKatty PintoNo ratings yet
- MODBUSDocument29 pagesMODBUSKatty PintoNo ratings yet
- Formatos de ImagenDocument5 pagesFormatos de ImagenKatty PintoNo ratings yet
- Resumen Exposicion 2Document2 pagesResumen Exposicion 2Katty PintoNo ratings yet
- Sensosr DTH11Document2 pagesSensosr DTH11Katty PintoNo ratings yet
- Manual de Pruebas Del 555Document4 pagesManual de Pruebas Del 555Katty PintoNo ratings yet
- Actividades Idea NegocioDocument9 pagesActividades Idea NegocioKatty PintoNo ratings yet
- Informe Cad CAMDocument20 pagesInforme Cad CAMKatty PintoNo ratings yet
- 2011 - Clase NI IMAQDocument12 pages2011 - Clase NI IMAQjirlfeNo ratings yet
- Material EsDocument1 pageMaterial EsKatty PintoNo ratings yet
- Proyecto Medición de VelocidadDocument13 pagesProyecto Medición de VelocidadKatty PintoNo ratings yet
- Partes de NI ELVIS IIDocument13 pagesPartes de NI ELVIS IIKatty Pinto100% (1)
- Practica de Diseño ElectrónicoDocument17 pagesPractica de Diseño ElectrónicoKatty Pinto100% (1)
- Ciencias de Los MaterialesDocument6 pagesCiencias de Los MaterialesKatty PintoNo ratings yet
- Informe RS232Document9 pagesInforme RS232Katty PintoNo ratings yet
- Informe Cad CAMDocument6 pagesInforme Cad CAMKatty PintoNo ratings yet
- Em Prendi Mien ToDocument6 pagesEm Prendi Mien ToKatty PintoNo ratings yet
- Una Comparación de WirelessHART y ZigBee para Aplicaciones IndustrialesDocument8 pagesUna Comparación de WirelessHART y ZigBee para Aplicaciones IndustrialesKatty PintoNo ratings yet
- Informe de Ciencia de Los MaterialesDocument6 pagesInforme de Ciencia de Los MaterialesKatty PintoNo ratings yet
- Mecanismo Ruedas DentadasDocument6 pagesMecanismo Ruedas DentadasKatty PintoNo ratings yet
- Mecanismo Ruedas DentadasDocument6 pagesMecanismo Ruedas DentadasKatty PintoNo ratings yet
- G.E.2Apreciacion EsculturaDocument8 pagesG.E.2Apreciacion EsculturaKatty PintoNo ratings yet
- Informe de Teorema TheveninDocument7 pagesInforme de Teorema TheveninKatty PintoNo ratings yet
- Captura de PantallaDocument2 pagesCaptura de PantallaKatty PintoNo ratings yet
- Habilidades Del Siglo XXIDocument2 pagesHabilidades Del Siglo XXIJimmy Vásquez SánchezNo ratings yet
- Breve Historia Del Universalismo y Otros Escritos (2020-2023)Document237 pagesBreve Historia Del Universalismo y Otros Escritos (2020-2023)El FachaNo ratings yet
- De Grados A Radianes y Radianes A GradosDocument19 pagesDe Grados A Radianes y Radianes A GradosrodrigoaguilaraguayoNo ratings yet
- Triptico de CienciasDocument2 pagesTriptico de CienciasMArcos ARenas EUstaquioNo ratings yet
- EvangelizarDocument2 pagesEvangelizarRamiro Ortiz AlcocerNo ratings yet
- Unidad 1.1 Teoría General de SistemasDocument66 pagesUnidad 1.1 Teoría General de SistemasSantiago CouraultNo ratings yet
- Entrenamiento y Capacidad Profesional ZZDocument3 pagesEntrenamiento y Capacidad Profesional ZZP.r. JHuber0% (1)
- Cuaderno de CampoDocument37 pagesCuaderno de CampoJazmin TiconaNo ratings yet
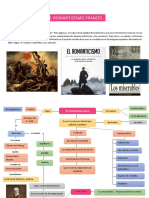
- El RomanticismoDocument4 pagesEl RomanticismoMariito NeymaRtins Sayaverde RospigLiosiNo ratings yet
- Carcinoma BasocelularDocument6 pagesCarcinoma BasocelularPiedad KatherineNo ratings yet
- Panorama Etnolinguistico Trabajo GrupalDocument19 pagesPanorama Etnolinguistico Trabajo GrupalFelix DozaNo ratings yet
- Nuevo Documento de Microsoft WordDocument1 pageNuevo Documento de Microsoft WordParque Ecoturistico la PlataNo ratings yet
- Levántate Alma CristianaDocument2 pagesLevántate Alma CristianaOmar OmarNo ratings yet
- Claves de Vitoria para Su Doctrina Sobre Los IndiosDocument22 pagesClaves de Vitoria para Su Doctrina Sobre Los IndiosAntonio García MegíaNo ratings yet
- La Importancia de La Paciencia en La Vida CotidianaDocument6 pagesLa Importancia de La Paciencia en La Vida CotidianabajabizmanNo ratings yet
- Historia de La Escuela Amable ArauzDocument2 pagesHistoria de La Escuela Amable ArauzMauricio Pilataxi67% (3)
- Used ToDocument2 pagesUsed ToRossy de SharonNo ratings yet
- Guia de Educación Física para Padres de Familias Del Iii Ciclo de e PDFDocument45 pagesGuia de Educación Física para Padres de Familias Del Iii Ciclo de e PDFMIGUEL SALHUANANo ratings yet
- NT1 Cuadernillo LenguajeDocument12 pagesNT1 Cuadernillo Lenguajepaoyarzo22No ratings yet
- Folleto Autoestima 2020 PDFDocument2 pagesFolleto Autoestima 2020 PDFGiro 360 gradosNo ratings yet
- Los Informes Contables Externos y La Legitimidad OrganizacionalDocument2 pagesLos Informes Contables Externos y La Legitimidad OrganizacionalAlexander OrozcoNo ratings yet
- Vicios Del LenguajeDocument16 pagesVicios Del Lenguajealexander ramos100% (1)
- Tecnica para Generar Equipo Creativo, Unidad 3Document19 pagesTecnica para Generar Equipo Creativo, Unidad 3ELUniversoDELATecnologia0% (1)
- Vyf PLDocument3 pagesVyf PLyofacu19No ratings yet