You might also like
- Corner Grounded Delta PDFDocument8 pagesCorner Grounded Delta PDFmivey100% (1)
- Em Lab-II ManualDocument45 pagesEm Lab-II Manualrkadiraj701150% (4)
- (Iiird Mechanical/Industrial) Generator and Motor Electrical Technology Unit 4Document124 pages(Iiird Mechanical/Industrial) Generator and Motor Electrical Technology Unit 4signjpcoe100% (1)
- Instruktsiya Po Ekspluatatsii - YCIV (En) .1218012617Document128 pagesInstruktsiya Po Ekspluatatsii - YCIV (En) .1218012617lilli786No ratings yet
- DC Machine PDFDocument434 pagesDC Machine PDFറിജിൽ വി ആർNo ratings yet
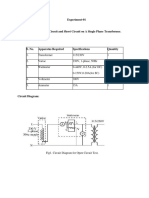
- Experiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheoryDocument7 pagesExperiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheorySur ShriNo ratings yet
- National Institute of Technology, Rourkela: Department of Electrical EngineeringDocument11 pagesNational Institute of Technology, Rourkela: Department of Electrical Engineeringvineeth kumarNo ratings yet
- Finite Element AnalysisDocument25 pagesFinite Element AnalysisAnonymous lV8E5mEONo ratings yet
- Ee2351 Question BankDocument59 pagesEe2351 Question Banksaran_0666100% (1)
- Eee 205-W1Document24 pagesEee 205-W1mahamudul hasan100% (1)
- Lecture 2a. Introduction To Fault AnalysisDocument54 pagesLecture 2a. Introduction To Fault Analysiswakolesha Tadeo100% (2)
- Electrical Machines-II Lab ManualDocument52 pagesElectrical Machines-II Lab Manualsai100% (1)
- 2019-20 HV Lab Manual Updated 078Document55 pages2019-20 HV Lab Manual Updated 078madhulavNo ratings yet
- V and Inverted V Curves of Synchronous MotorDocument7 pagesV and Inverted V Curves of Synchronous Motorkarthikeyan249No ratings yet
- Process Control Instrumentation Technology 8th EdDocument22 pagesProcess Control Instrumentation Technology 8th EdmitulNo ratings yet
- Ac Machines Lab ManualDocument102 pagesAc Machines Lab ManualAshwin Gopinath100% (3)
- Fault AnalysisDocument29 pagesFault AnalysisWaqar Ahmed0% (1)
- Eee-Vi-power System Analysis and Stability (10ee61) - NotesDocument119 pagesEee-Vi-power System Analysis and Stability (10ee61) - NotesNurul Islam Faruk0% (1)
- Induction MachinesDocument81 pagesInduction MachinesSandeep SoniNo ratings yet
- Induction MachinesDocument81 pagesInduction MachinesSandeep SoniNo ratings yet
- (2 2) Short Circuit CalculationDocument38 pages(2 2) Short Circuit CalculationElectro Tractrix100% (1)
- Droop Mode Setting in Governor - CaterpillarDocument36 pagesDroop Mode Setting in Governor - CaterpillarSrinivasan TR100% (1)
- Machines II ManualsDocument37 pagesMachines II ManualsAtharv ParanjpeNo ratings yet
- Elctrical Protection SystemDocument80 pagesElctrical Protection SystemAvnish Bhasin100% (1)
- EM-II Lab Manual 28.10.08 LatestDocument72 pagesEM-II Lab Manual 28.10.08 LatestPakala YedukondaluNo ratings yet
- Electrical Machines 1 Lab Manual May 2015Document129 pagesElectrical Machines 1 Lab Manual May 2015SufiSayyidZakiyahNo ratings yet
- Electrical Machine Lab ManualDocument61 pagesElectrical Machine Lab ManualPrem SharmaNo ratings yet
- Electrical Machine Lab ManualDocument61 pagesElectrical Machine Lab ManualPrem SharmaNo ratings yet
- Diploma ELECTRICAl 6th Sem SylDocument21 pagesDiploma ELECTRICAl 6th Sem SylAadil Ashraf KhanNo ratings yet
- Unit IV Ac Machines TamilDocument25 pagesUnit IV Ac Machines TamilDeivathin adimaikalNo ratings yet
- Synchronous MotorDocument4 pagesSynchronous MotorLiviu DeaconuNo ratings yet
- High VoltageDocument30 pagesHigh VoltageMohammed Mansoor100% (1)
- 17eel37 Eml Lab ManualDocument64 pages17eel37 Eml Lab ManualpriyaNo ratings yet
- Powwer Systems Lab List of ExperimentsDocument8 pagesPowwer Systems Lab List of ExperimentsAneesh AbhiNo ratings yet
- EM-I Lab Viva Questions Updated OnDocument6 pagesEM-I Lab Viva Questions Updated OnNagamohan BilluNo ratings yet
- EE4003 Power Systems II: Course SyllabusDocument24 pagesEE4003 Power Systems II: Course SyllabusKalum ChandraNo ratings yet
- Brushless DC MotorsDocument7 pagesBrushless DC MotorsRonald LugwireNo ratings yet
- Transmission Line EditorDocument4 pagesTransmission Line EditorHassen LazharNo ratings yet
- Transmission LinesDocument6 pagesTransmission LineskgovindrajanNo ratings yet
- All Classroom Class ExamplesDocument51 pagesAll Classroom Class ExamplesAhmed Sabri0% (1)
- AC Lines SVS CompensationDocument8 pagesAC Lines SVS CompensationSagar ThakerNo ratings yet
- Lab Manual Electrical Workshop4 IDocument47 pagesLab Manual Electrical Workshop4 Ishoaib ehsanNo ratings yet
- Control System Lab ManualDocument56 pagesControl System Lab ManualSrinivas Kondal Rao100% (3)
- Network Analysis &transmission Lines PDFDocument183 pagesNetwork Analysis &transmission Lines PDFmlsawhney2996No ratings yet
- EE2092!1!2011 FundamentalsDocument84 pagesEE2092!1!2011 FundamentalsshrnbolonneNo ratings yet
- Series & Shunt CapacitorsDocument5 pagesSeries & Shunt Capacitorsneo100% (3)
- EE2092!2!2011 Coupled Circuits Dependant SourcesDocument100 pagesEE2092!2!2011 Coupled Circuits Dependant SourcesshrnbolonneNo ratings yet
- Parameters Which Effect Real and Reactive Power Flow: I I E X+ZDocument12 pagesParameters Which Effect Real and Reactive Power Flow: I I E X+ZvenkatNo ratings yet
- Load FlowDocument5 pagesLoad FlowReshab SahooNo ratings yet
- DC Machines: 6.1 What Does One Look Like?Document7 pagesDC Machines: 6.1 What Does One Look Like?phoenix226No ratings yet
- Svcet: Sri Vidya College of Engg and Tech Course Material Unit IDocument36 pagesSvcet: Sri Vidya College of Engg and Tech Course Material Unit IGokul ChandrasekaranNo ratings yet
- Static RelaysDocument89 pagesStatic RelaysAnonymous DbmKEDxNo ratings yet
- Electro-Thermal Analysis of An Induction MotorDocument5 pagesElectro-Thermal Analysis of An Induction MotorS Bharadwaj Reddy100% (1)
- Unit-3 PsocDocument23 pagesUnit-3 PsocDESI BRAHMNNo ratings yet
- Retardation TestDocument5 pagesRetardation TestAnkit Shetty100% (1)
- Government Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesDocument18 pagesGovernment Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesVK DNo ratings yet
- II - PowerPoint Slides To Chapter 01 IntroductionDocument17 pagesII - PowerPoint Slides To Chapter 01 IntroductionVishesh Dhillon100% (2)
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDocument3 pagesExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalNo ratings yet
- Advance Power SystemsDocument88 pagesAdvance Power SystemsRachit KhannaNo ratings yet
- Basic Electrical Laboratory Manual: Department of Electrical EngineeringDocument42 pagesBasic Electrical Laboratory Manual: Department of Electrical EngineeringSourav SahooNo ratings yet
- Yog Patil - Expt. No. 3Document8 pagesYog Patil - Expt. No. 3Yog PatilNo ratings yet
- Sr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorDocument40 pagesSr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorSagar G ReddyNo ratings yet
- Govt. Engineering College, Ajmer: Electrical Measurement LabDocument6 pagesGovt. Engineering College, Ajmer: Electrical Measurement LabAnkit0% (1)
- Manual Ee IVDocument56 pagesManual Ee IVAkhilesh Kumar MishraNo ratings yet
- EEE Department Electrical Measurements Lab ManualDocument47 pagesEEE Department Electrical Measurements Lab ManualZer ZENITHNo ratings yet
- Exp1 The Single Phase TransformerDocument8 pagesExp1 The Single Phase Transformernaveen rajNo ratings yet
- 19bei0067 VL2021220100832 Ast03Document12 pages19bei0067 VL2021220100832 Ast03freeretdocsNo ratings yet
- Machine LabDocument7 pagesMachine LabNurjahan-Ara StudentNo ratings yet
- IM ModelingDocument27 pagesIM ModelingIrfan QureshiNo ratings yet
- Active Filter NotesDocument19 pagesActive Filter NotesSrinivasu RajuNo ratings yet
- Ee2305 PDFDocument81 pagesEe2305 PDFറിജിൽ വി ആർNo ratings yet
- 109ee0039 PDFDocument47 pages109ee0039 PDFrijilpoothadiNo ratings yet
- Kelvins Double Bridge: Experiment 11Document1 pageKelvins Double Bridge: Experiment 11റിജിൽ വി ആർNo ratings yet
- Lec 28Document14 pagesLec 28റിജിൽ വി ആർNo ratings yet
- EE2259 Lab Manual PDFDocument97 pagesEE2259 Lab Manual PDFsivaeinfoNo ratings yet
- Guidelines For Filling Let-2015 Application FormDocument1 pageGuidelines For Filling Let-2015 Application Formറിജിൽ വി ആർNo ratings yet
- Cruise Missile - Article From Defence TodayDocument3 pagesCruise Missile - Article From Defence TodayAmey KulkarniNo ratings yet
- Guidelines For Filling Let-2015 Application FormDocument1 pageGuidelines For Filling Let-2015 Application Formറിജിൽ വി ആർNo ratings yet
- MPPTDraftDocument6 pagesMPPTDraftറിജിൽ വി ആർNo ratings yet
- Power Supply Functional Test System: Adapter/Converter Test 400 SeriesDocument2 pagesPower Supply Functional Test System: Adapter/Converter Test 400 Seriesറിജിൽ വി ആർNo ratings yet
- DC - AC ConverterDocument10 pagesDC - AC ConverterLukman Hakim BaharuddinNo ratings yet
- Recent Trends in Brushless DC (BLDC) Motor FundamentalsDocument8 pagesRecent Trends in Brushless DC (BLDC) Motor Fundamentalsറിജിൽ വി ആർNo ratings yet
- Sfa Star Charts ProDocument18 pagesSfa Star Charts Proറിജിൽ വി ആർNo ratings yet
- Cruise Missile - Article From Defence TodayDocument3 pagesCruise Missile - Article From Defence TodayAmey KulkarniNo ratings yet
- BJTDocument36 pagesBJTMarchelius KalvinNo ratings yet
- SL - No Name of Materials Specification Quantity Rate Amount RemarksDocument1 pageSL - No Name of Materials Specification Quantity Rate Amount Remarksറിജിൽ വി ആർNo ratings yet
- BezickDocument12 pagesBezickറിജിൽ വി ആർNo ratings yet
- Pss Manual NewDocument34 pagesPss Manual Newറിജിൽ വി ആർNo ratings yet
- BezickDocument12 pagesBezickറിജിൽ വി ആർNo ratings yet
- IES CONV Electrical Engineering 1999Document8 pagesIES CONV Electrical Engineering 1999jitenNo ratings yet
- Capacitor Motor - Generator FinalDocument10 pagesCapacitor Motor - Generator FinalPiyush SinghNo ratings yet
- Ajmera New Price List W.E.F. 01.05.2016Document3 pagesAjmera New Price List W.E.F. 01.05.2016RITESH SENTANo ratings yet
- Cable Sizing CalculationDocument1 pageCable Sizing CalculationhafizheryNo ratings yet
- Unisonic Technologies Co., LTD: 14.7A, 100V (D-S) N-CHANNEL Power MosfetDocument5 pagesUnisonic Technologies Co., LTD: 14.7A, 100V (D-S) N-CHANNEL Power MosfetEnrique LandraNo ratings yet
- Catalogo Disjuntores 3VA (ENG)Document114 pagesCatalogo Disjuntores 3VA (ENG)Renato100% (1)
- Sistema ElectricoDocument7 pagesSistema ElectricoJesus BombasNo ratings yet
- Beie Important Questions For Unit 3 and Unit 4Document5 pagesBeie Important Questions For Unit 3 and Unit 4vlkumashankardeekshithNo ratings yet
- 11 KV SwitchgearDocument24 pages11 KV SwitchgearMD Zakirul Islam SarkerNo ratings yet
- Materials System SpecificationDocument10 pagesMaterials System SpecificationMudabbir Hussain100% (1)
- Nfpa 70 2020 - 245Document3 pagesNfpa 70 2020 - 245heladio huaqui100% (1)
- RELESDocument24 pagesRELESROBINSON FERNEYNo ratings yet
- 1N/FDLL 914/A/B / 916/A/B / 4148 / 4448: Small Signal DiodeDocument1 page1N/FDLL 914/A/B / 916/A/B / 4148 / 4448: Small Signal DiodelejigeNo ratings yet
- Semi Lab 2Document17 pagesSemi Lab 2Fatima AmjadNo ratings yet
- DATA SHEET DTB72.5 2GJA601062 - Rev ADocument9 pagesDATA SHEET DTB72.5 2GJA601062 - Rev AHernan GeovannyNo ratings yet
- Vector Control of Induction Motor Without Shaft EncoderDocument8 pagesVector Control of Induction Motor Without Shaft Encoderapi-3826450No ratings yet
- Automatic Load Sharing of Transformers: Ashish R. Ambalkar Nitesh M. Bhoyar Vivek V. Badarkhe Vivek B. BatheDocument3 pagesAutomatic Load Sharing of Transformers: Ashish R. Ambalkar Nitesh M. Bhoyar Vivek V. Badarkhe Vivek B. BatheBhart NiraniaNo ratings yet
- Basics For The GFMDocument6 pagesBasics For The GFMReno BoilardNo ratings yet
- Vox Cambridge30R PDFDocument9 pagesVox Cambridge30R PDFGabriel WilliamsNo ratings yet
- 08 DetectingDocument88 pages08 DetectingStanley PolancoNo ratings yet
- Catalogo Record PlusDocument252 pagesCatalogo Record PlusCarlos HernandezNo ratings yet
- Water Tank Indicator DLD Open EndedDocument3 pagesWater Tank Indicator DLD Open EndedZayd IqbalNo ratings yet
- Grid Solutions: Auxiliary RelayDocument4 pagesGrid Solutions: Auxiliary RelayC&P Group0% (1)
- Asco PV Emxx Solenoid Valve Operator II 2 G Ex MB II t6..t3 II 2 D Ex MD 21 Ip67Document2 pagesAsco PV Emxx Solenoid Valve Operator II 2 G Ex MB II t6..t3 II 2 D Ex MD 21 Ip67Mustafa TemelNo ratings yet
- Regulated Power Supply Circuit - Arguelles, Allona Laine J.Document5 pagesRegulated Power Supply Circuit - Arguelles, Allona Laine J.spyde austriaNo ratings yet
- ThiristorDocument10 pagesThiristorNarasimhaPrasadNo ratings yet