You might also like
- High Voltage Engineering QuestionsDocument4 pagesHigh Voltage Engineering QuestionsIsradani MjNo ratings yet
- Training ReportDocument49 pagesTraining ReportIsradani MjNo ratings yet
- Introduction To Electronics ComponentsDocument23 pagesIntroduction To Electronics ComponentsIsradani MjNo ratings yet
- Unitrolf CatalogDocument8 pagesUnitrolf CatalogIsradani MjNo ratings yet
- SC Um 8279Document35 pagesSC Um 8279Isradani MjNo ratings yet
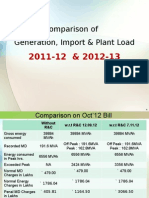
- Comparison of Generation, Import & Plant LoadDocument8 pagesComparison of Generation, Import & Plant LoadIsradani MjNo ratings yet
- Introduction To Drives: Teamwork & TechnologyDocument20 pagesIntroduction To Drives: Teamwork & TechnologyIsradani MjNo ratings yet
- Hey Brother - AviciiDocument2 pagesHey Brother - AviciiIsradani MjNo ratings yet
- 5parameter ListDocument86 pages5parameter ListIsradani MjNo ratings yet
- Protection of GeneratorDocument60 pagesProtection of GeneratorIsradani MjNo ratings yet
- VVVF DrivesDocument16 pagesVVVF DrivesIsradani MjNo ratings yet
- Varispeed-F7 Manual PDFDocument463 pagesVarispeed-F7 Manual PDFIsradani MjNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Oracle LinuxKsplice User's Guide - E39380Document48 pagesOracle LinuxKsplice User's Guide - E39380Layka2009No ratings yet
- Curriculum VitaeDocument2 pagesCurriculum VitaeNavdiep SandharNo ratings yet
- Installation LogDocument30 pagesInstallation LogJohn Miguel AndulaNo ratings yet
- Embedded Systems Lecture 5 Board Based Embedded SystemDocument79 pagesEmbedded Systems Lecture 5 Board Based Embedded SystemElihu GetachewNo ratings yet
- Quiz 2 Fall 2021Document5 pagesQuiz 2 Fall 2021Rayan Al GhawiNo ratings yet
- Sun Storedge 3000 Family Cli 2.5 User'S GuideDocument308 pagesSun Storedge 3000 Family Cli 2.5 User'S GuideHanumantha Rao PNo ratings yet
- PalindromeDocument7 pagesPalindromeZy AdrianneNo ratings yet
- Forensic Analysis of Windows 7 Jump ListsDocument48 pagesForensic Analysis of Windows 7 Jump ListsRob LynessNo ratings yet
- Assingment AnswersDocument9 pagesAssingment AnswersMohammad saheemNo ratings yet
- Digit Magazine - April 2016Document124 pagesDigit Magazine - April 2016Mohit PremaniNo ratings yet
- Sentinel PricingDocument13 pagesSentinel PricingyangningNo ratings yet
- Manual Roller 20 PNDocument33 pagesManual Roller 20 PNSilvio Luiz SalotiNo ratings yet
- Delphi - Pointers in DelphiDocument3 pagesDelphi - Pointers in DelphipahduarteNo ratings yet
- Nodeb LMT User Guide (v100r015c00 - 02) (PDF) - enDocument206 pagesNodeb LMT User Guide (v100r015c00 - 02) (PDF) - ennayaritNo ratings yet
- Python (Programming Language)Document20 pagesPython (Programming Language)MichelNo ratings yet
- Distributed Computing System (DCS) Solved MCQs (Set-1)Document5 pagesDistributed Computing System (DCS) Solved MCQs (Set-1)GamergenixNo ratings yet
- HUAWEI U8820 V100R001USAC189B667 Software Upgrade GuidelineDocument10 pagesHUAWEI U8820 V100R001USAC189B667 Software Upgrade GuidelineElver DiosesNo ratings yet
- Apple Cjenovnik Juni 2013Document8 pagesApple Cjenovnik Juni 2013BarrneyNo ratings yet
- Atmega 32 InterfacingDocument34 pagesAtmega 32 InterfacingvineethrajanNo ratings yet
- Invitation To Computer Science 8Th Edition G Michael Schneider Full ChapterDocument67 pagesInvitation To Computer Science 8Th Edition G Michael Schneider Full Chaptererika.hemmings524100% (4)
- Device ListDocument9 pagesDevice ListZoran MoravacNo ratings yet
- Instruction For Tabula (Python)Document33 pagesInstruction For Tabula (Python)SEAN YONATHAN TANJUNG ,No ratings yet
- Pricelist Evio Multimedia - Februari 2022Document8 pagesPricelist Evio Multimedia - Februari 2022Yusuf GunawanNo ratings yet
- Topic 4 MicroprocessorDocument40 pagesTopic 4 MicroprocessorKucing HitemNo ratings yet
- Russia ResearchDocument163 pagesRussia Researchdarren5566No ratings yet
- John P Berry Resume 2Document2 pagesJohn P Berry Resume 2api-251291236No ratings yet
- Free Wifi On 2023 Without Paying BillsDocument1 pageFree Wifi On 2023 Without Paying BillsAleph TavNo ratings yet
- Voltage Regulators For The 8202-E4BDocument106 pagesVoltage Regulators For The 8202-E4Bender40No ratings yet
- Principles of Compiler Design: Unit IDocument9 pagesPrinciples of Compiler Design: Unit IAbhijeet MoharkarNo ratings yet
- Enq US Contention Row Cache ObjectsDocument2 pagesEnq US Contention Row Cache ObjectspulaksayNo ratings yet