You might also like
- Chopra - Singla - Dewan - 54 - PID Inverse PDFDocument15 pagesChopra - Singla - Dewan - 54 - PID Inverse PDFLarry LimNo ratings yet
- Paper 1Document8 pagesPaper 1AmmarALJodahNo ratings yet
- Controlling of D.C. Motor Using Fuzzy Logic Controller: Husain AhmedDocument5 pagesControlling of D.C. Motor Using Fuzzy Logic Controller: Husain AhmedCristian SsggNo ratings yet
- Observer-Based Nonlinear Feedback Controls For Heartbeat ECG Tracking SystemsDocument11 pagesObserver-Based Nonlinear Feedback Controls For Heartbeat ECG Tracking SystemsBilalAwanNo ratings yet
- Ecg Based Heart Rate Monitoring System Implementation Using Fpga For Low Power Devices and Applications PDFDocument5 pagesEcg Based Heart Rate Monitoring System Implementation Using Fpga For Low Power Devices and Applications PDFesatjournalsNo ratings yet
- Study of Neural Network PID Control in Variable Frequency Air-Conditioning SystemDocument6 pagesStudy of Neural Network PID Control in Variable Frequency Air-Conditioning Systemsolarflare_No ratings yet
- Real Time Wireless Health Monitoring SystemDocument8 pagesReal Time Wireless Health Monitoring SystemSaurav KishoreNo ratings yet
- Design of Feedback Controller For Boost Converter Using Optimization TechniqueDocument12 pagesDesign of Feedback Controller For Boost Converter Using Optimization Techniquekiem_nguyenmanhNo ratings yet
- CHR MethodDocument9 pagesCHR Methodsanyo0612No ratings yet
- Tuning of PID Controller Using Ziegler-NicholsDocument16 pagesTuning of PID Controller Using Ziegler-NicholsPraveen Meena100% (1)
- Optimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranDocument6 pagesOptimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranztztztztNo ratings yet
- Tuning of PID Controller Using Ziegler-Nichols Method For Speed Control of DC MotorDocument6 pagesTuning of PID Controller Using Ziegler-Nichols Method For Speed Control of DC Motoreubis_machado4370No ratings yet
- £π sqrt (1−£) 0.1π sqrt (1−0.1)Document1 page£π sqrt (1−£) 0.1π sqrt (1−0.1)Alex WilliamsNo ratings yet
- IOT Based Low Cost Blood Pressure Monitoring System Using LPC 2148Document16 pagesIOT Based Low Cost Blood Pressure Monitoring System Using LPC 2148Pratima ChavanNo ratings yet
- Design of PID Controller For Automatic Voltage Regulator and Validation Using Hardware in The Loop TechniqueDocument15 pagesDesign of PID Controller For Automatic Voltage Regulator and Validation Using Hardware in The Loop TechniqueroyclhorNo ratings yet
- Temperature Control Waterbath Control System Using PID ControllerDocument5 pagesTemperature Control Waterbath Control System Using PID ControllerReno Sandy YusufNo ratings yet
- Method To Control The Output Power of Laser in The Variation of Ambient TemperatureDocument5 pagesMethod To Control The Output Power of Laser in The Variation of Ambient TemperatureInternational Journal of Engineering Inventions (IJEI)No ratings yet
- 12 Lead ECG Data Compression Using Principal Component AnalysisDocument6 pages12 Lead ECG Data Compression Using Principal Component AnalysisInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Area and Performance Aware ECG Encoder Design For Wireless Healthcare ServicesDocument6 pagesAn Area and Performance Aware ECG Encoder Design For Wireless Healthcare ServiceskalaiyarasiNo ratings yet
- InTech-Pid Control TheoryDocument17 pagesInTech-Pid Control TheoryAbner BezerraNo ratings yet
- Fuzzy Gain Scheduling of PID ControllersDocument1 pageFuzzy Gain Scheduling of PID ControllersRio Ananda PutraNo ratings yet
- Speed Control of A Real Time D.C. Shunt Motor Using SA Based Tuning of A PID ControllerDocument7 pagesSpeed Control of A Real Time D.C. Shunt Motor Using SA Based Tuning of A PID Controllerprince1991kundraNo ratings yet
- Robust Classification of Cardiac Arrhythmia Using Machine LearningDocument9 pagesRobust Classification of Cardiac Arrhythmia Using Machine LearningIJRASETPublicationsNo ratings yet
- 2616-Article Text-4940-1-10-20210416Document5 pages2616-Article Text-4940-1-10-20210416maxor4242No ratings yet
- Implementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesDocument8 pagesImplementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesIngole DeepakNo ratings yet
- R T Time of Shunt: Eduction in The Ransient Active Filters Using Intelligent ControllersDocument8 pagesR T Time of Shunt: Eduction in The Ransient Active Filters Using Intelligent ControllersijscmcNo ratings yet
- ECG Compression and Labview Implementation: Tatiparti Padma, M. Madhavi Latha, Abrar AhmedDocument7 pagesECG Compression and Labview Implementation: Tatiparti Padma, M. Madhavi Latha, Abrar AhmedManjot AroraNo ratings yet
- Proposal Modified LatestDocument8 pagesProposal Modified LatestusmanzahidNo ratings yet
- Patient Monitoring System For Cardiovascular Patient With Body Temperature Using Lab VIEWDocument4 pagesPatient Monitoring System For Cardiovascular Patient With Body Temperature Using Lab VIEWIJERDNo ratings yet
- Hardware Implementation of PID and ACO Based Wireless Heating SystemDocument9 pagesHardware Implementation of PID and ACO Based Wireless Heating SystemMutiaAfifahNo ratings yet
- Fuzzy Pid BasicDocument6 pagesFuzzy Pid BasichabbythomasaNo ratings yet
- Analysis Ofh-Infinity Controllers in Fuel Cell Powered Uninterruptible Power Supply SystemDocument4 pagesAnalysis Ofh-Infinity Controllers in Fuel Cell Powered Uninterruptible Power Supply SystemMurali DharanNo ratings yet
- PID Control TheoryDocument17 pagesPID Control TheoryManuel Santos MNo ratings yet
- Temperature Control Water Bath System Using PID ControllerDocument5 pagesTemperature Control Water Bath System Using PID Controllerprapya pokharelNo ratings yet
- CLP 1Document8 pagesCLP 1ace4No ratings yet
- Development and Evaluation of One Arm Electrode BasedDocument4 pagesDevelopment and Evaluation of One Arm Electrode BasedKarthik Raj VNo ratings yet
- 4.design FullDocument12 pages4.design FullTJPRC PublicationsNo ratings yet
- Uncertainty AnalysisDocument14 pagesUncertainty AnalysisVictorTomaNo ratings yet
- Case Study of PID Control in An FPGA PDFDocument18 pagesCase Study of PID Control in An FPGA PDFwigaYeHtetNo ratings yet
- Controller TuningDocument7 pagesController TuningsaxenanikitaNo ratings yet
- Average Modelling of Boost ConverterDocument21 pagesAverage Modelling of Boost ConverterSwarn ShahiNo ratings yet
- Abnormality Detection in ECG Signal Using Wavelets and Fourier TransformDocument6 pagesAbnormality Detection in ECG Signal Using Wavelets and Fourier TransformAJER JOURNALNo ratings yet
- ECG Health Monitoring System Using ARDUINO - Formatted PaperDocument5 pagesECG Health Monitoring System Using ARDUINO - Formatted Paperlokesh patilNo ratings yet
- Model Reference Adaptive Control of Jacketed Stirred Tank HeaterDocument6 pagesModel Reference Adaptive Control of Jacketed Stirred Tank HeaterChung ChuanNo ratings yet
- Study of Fuzzy Logic and Pid Controller in Buck-Boost ConverterDocument4 pagesStudy of Fuzzy Logic and Pid Controller in Buck-Boost ConverterijsretNo ratings yet
- HM1100 UM EU E Rev.1.1 131101 Screen PDFDocument8 pagesHM1100 UM EU E Rev.1.1 131101 Screen PDFMukesh LavanNo ratings yet
- Tuning of Pid Controller Used in Agc Scheme With Genetic AlgorithmsDocument6 pagesTuning of Pid Controller Used in Agc Scheme With Genetic Algorithmsjjm_8679641No ratings yet
- A Genetically Tuned Optimal PID ControllerDocument5 pagesA Genetically Tuned Optimal PID ControllerkasdoellahNo ratings yet
- Engine Status Monitoring System Using Real Time Clock (ds1307)Document4 pagesEngine Status Monitoring System Using Real Time Clock (ds1307)International Journal of computational Engineering research (IJCER)No ratings yet
- Vital Signs Monitoring in Human BodyDocument4 pagesVital Signs Monitoring in Human BodyEditor IJRITCCNo ratings yet
- A Comparative Study of Heart Rate Estimation Via Air Pressure SensorDocument6 pagesA Comparative Study of Heart Rate Estimation Via Air Pressure SensorJavier NavarroNo ratings yet
- A Simulator For Oscillometric Blood-Pressure SignalsDocument8 pagesA Simulator For Oscillometric Blood-Pressure SignalsOscar Ramirez GarciaNo ratings yet
- Dynamics and ControlDocument5 pagesDynamics and Controlbhagwat26No ratings yet
- Design PID Controllers For Desired Time-Domain or Frequency-Domain ResponseDocument10 pagesDesign PID Controllers For Desired Time-Domain or Frequency-Domain ResponseAnonymous WkbmWCa8MNo ratings yet
- The Design of Digital Heart Rate Meter Using MicrocontrollerDocument4 pagesThe Design of Digital Heart Rate Meter Using MicrocontrollerAMELIA RIZKI SHUFYANANDA SISWANo ratings yet
- Simulation & Controlling of Brushless DC Motor Using PI/Fuzzy HybridDocument4 pagesSimulation & Controlling of Brushless DC Motor Using PI/Fuzzy Hybridsunil kumarNo ratings yet
- Automatic Voltage Regulator (AVR) Optimization Based On PID Using The Hybrid Grey Wolf Optimization - Genetic Algorithm (HGWGA) MethodDocument6 pagesAutomatic Voltage Regulator (AVR) Optimization Based On PID Using The Hybrid Grey Wolf Optimization - Genetic Algorithm (HGWGA) MethodArdhito PrimatamaNo ratings yet
- Artificial Intelligence for Computational Modeling of the HeartFrom EverandArtificial Intelligence for Computational Modeling of the HeartTommaso MansiNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Effective Intermolecular Interaction Potentials of Gaseous Fluorine, Chlorine, Bromine, and IodineDocument14 pagesEffective Intermolecular Interaction Potentials of Gaseous Fluorine, Chlorine, Bromine, and IodineJakler NicheleNo ratings yet
- Olmi 2017 Meas. Sci. Technol. 28 014003Document7 pagesOlmi 2017 Meas. Sci. Technol. 28 014003Jakler NicheleNo ratings yet
- Molecular Dynamics Calculation Ofthe Dielectric Constant Dynamic Properties of A Fluid of 2-D Stockmayer MoleculesDocument20 pagesMolecular Dynamics Calculation Ofthe Dielectric Constant Dynamic Properties of A Fluid of 2-D Stockmayer MoleculesJakler NicheleNo ratings yet
- Commentary For Academic Writing For Graduate StudentsDocument123 pagesCommentary For Academic Writing For Graduate StudentsJakler Nichele100% (1)
- Chemical Physics Letters: Orsolya Gereben, László PusztaiDocument4 pagesChemical Physics Letters: Orsolya Gereben, László PusztaiJakler NicheleNo ratings yet
- (1964) Correlations in The Motions of Atoms in Liquid ArgonDocument7 pages(1964) Correlations in The Motions of Atoms in Liquid ArgonJakler Nichele100% (1)
- (1959) Studies in Molecular Dynamics. I. General MethodDocument8 pages(1959) Studies in Molecular Dynamics. I. General MethodJakler NicheleNo ratings yet
- Carolyn J. Sharp, Irony and Meaning in The Hebrew Bible. Bloomington: IndianaDocument2 pagesCarolyn J. Sharp, Irony and Meaning in The Hebrew Bible. Bloomington: IndianaJakler NicheleNo ratings yet
- Finely Dispersed ParticlesDocument936 pagesFinely Dispersed ParticlesJakler NicheleNo ratings yet
- SPH LAMMPS UserguideDocument23 pagesSPH LAMMPS UserguideJakler NicheleNo ratings yet
- (1967) History of The Lenz-Ising ModelDocument13 pages(1967) History of The Lenz-Ising ModelJakler NicheleNo ratings yet
- Modi Fied Blalock Taussig Shunt: A Not-So-Simple Palliative ProcedureDocument7 pagesModi Fied Blalock Taussig Shunt: A Not-So-Simple Palliative ProcedureJakler NicheleNo ratings yet
- Nooma #08 - DustDocument17 pagesNooma #08 - DustJakler NicheleNo ratings yet
- Bomba de Vácuo Sotorbilt 4mrDocument12 pagesBomba de Vácuo Sotorbilt 4mrWormInchNo ratings yet
- Punjab Bye Laws For Commercial BuildingsDocument11 pagesPunjab Bye Laws For Commercial BuildingsAshween ManchandaNo ratings yet
- Catalogo Towel RailsDocument1 pageCatalogo Towel RailsrodijammoulNo ratings yet
- Bosch Powerpack-BrochureDocument16 pagesBosch Powerpack-BrochurengazawooNo ratings yet
- NAEC Approved Continuing Education 2018marchDocument26 pagesNAEC Approved Continuing Education 2018marchRuano Andreola StumpfNo ratings yet
- Citrix Xenserver ® 6.0.2 Emergency Network Reset: Published Wednesday, 29 February 2012 1.0 EditionDocument6 pagesCitrix Xenserver ® 6.0.2 Emergency Network Reset: Published Wednesday, 29 February 2012 1.0 EditionJuan CarlosNo ratings yet
- Dataproducts - LZR 1260 Laser Printer (1989)Document6 pagesDataproducts - LZR 1260 Laser Printer (1989)Bobby ChippingNo ratings yet
- Operational Definition of TermsDocument2 pagesOperational Definition of TermsHazel Grace Tugado Torrecampo67% (3)
- How To Fix - External Disk Drive Suddenly Became RAWDocument96 pagesHow To Fix - External Disk Drive Suddenly Became RAWAntonio Marcano0% (1)
- Hot Water Recirculation PumpsDocument22 pagesHot Water Recirculation Pumpsniaz kilamNo ratings yet
- Plumbing Fixture CatalogueDocument10 pagesPlumbing Fixture CatalogueNoemi D. BreñaNo ratings yet
- Technical LetteringDocument12 pagesTechnical LetteringMaverick Timbol50% (2)
- Breakdown Price by DivisionsDocument6 pagesBreakdown Price by DivisionsFoisulAlamNo ratings yet
- BC 20s HandbuchDocument173 pagesBC 20s HandbuchmanoharNo ratings yet
- Uponor Dop Klett CPR 20 Ic 251 V 001Document3 pagesUponor Dop Klett CPR 20 Ic 251 V 001jamppajoo2No ratings yet
- Electrochemical Measurement of Diffusible Hydrogen in Steels (Barnacle Electrode)Document6 pagesElectrochemical Measurement of Diffusible Hydrogen in Steels (Barnacle Electrode)Faiber AndrésNo ratings yet
- Jadual 6 MpobDocument11 pagesJadual 6 MpobTipah HafizahNo ratings yet
- Gulfco Fleet Premium: Heavy Duty Gas Engine Oil For Mobile ApplicationDocument1 pageGulfco Fleet Premium: Heavy Duty Gas Engine Oil For Mobile ApplicationAlisson Marcela ContrerasNo ratings yet
- Lab 2.1Document2 pagesLab 2.1Manjari Srivastava100% (3)
- On The Gaussian Error Function (1935) : Robert J. KolkerDocument4 pagesOn The Gaussian Error Function (1935) : Robert J. KolkerSanthosh KulandaiyanNo ratings yet
- ASTM D287-92 (Metodo de Prueba Estandar para Gravedad API de Petroleo Crudo y Productos Del Petroleo Metodo Del Hidrómetro)Document3 pagesASTM D287-92 (Metodo de Prueba Estandar para Gravedad API de Petroleo Crudo y Productos Del Petroleo Metodo Del Hidrómetro)Juan MonjeNo ratings yet
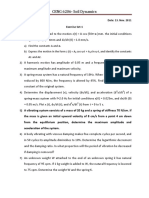
- CENG6206 Soil Dynamics ExerciseProblemDocument4 pagesCENG6206 Soil Dynamics ExerciseProblemFekadu Wub100% (1)
- Procedure For Field Joint CoatingDocument10 pagesProcedure For Field Joint CoatingM Waqas HabibNo ratings yet
- EC8093 - Digital Image Processing (Ripped From Amazon Kindle Ebooks by Sai Seena) PDFDocument102 pagesEC8093 - Digital Image Processing (Ripped From Amazon Kindle Ebooks by Sai Seena) PDFSivaramakrishnan Kanagaraj0% (1)
- Códigos de Falhas Hyundai R3607ADocument13 pagesCódigos de Falhas Hyundai R3607AGuemep GuemepNo ratings yet
- Calculation Rail Beam (Hoist Capacity 3 Ton)Document4 pagesCalculation Rail Beam (Hoist Capacity 3 Ton)Edo Faizal2No ratings yet
- Invalid Keyword Argument Python - December 25 2017Document3 pagesInvalid Keyword Argument Python - December 25 2017Kaleab TekleNo ratings yet
- IMDSDocument13 pagesIMDSJohn OoNo ratings yet
- 7695v2.1 (G52 76951X8) (A55 G45 - A55 G55)Document70 pages7695v2.1 (G52 76951X8) (A55 G45 - A55 G55)Dávid SzabóNo ratings yet
- E3 - 5.5.3 - PTAct Troubleshooting Spanning Tree ProtocolDocument2 pagesE3 - 5.5.3 - PTAct Troubleshooting Spanning Tree ProtocolIvandiNo ratings yet