You might also like
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoFrom EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoRating: 4.5 out of 5 stars4.5/5 (12)
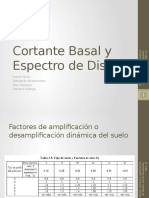
- Cortante Basal y Espectro de DiseñoDocument16 pagesCortante Basal y Espectro de DiseñoJosé Sebastián BustamanteNo ratings yet
- 1civ25 Ame - Ex2 2020-1Document6 pages1civ25 Ame - Ex2 2020-1Jhon Cano NalverteNo ratings yet
- Modelo para Predecir El Comportamiento Cíclico Del Acero de RefuerzoDocument2 pagesModelo para Predecir El Comportamiento Cíclico Del Acero de RefuerzoPiers Raph100% (1)
- Tarea AcademicaDocument11 pagesTarea AcademicaManuel Antonio Antón CalderónNo ratings yet
- Apuntes de Ingeniería Antisísmica PDFDocument121 pagesApuntes de Ingeniería Antisísmica PDFignacioNo ratings yet
- Elemento Triangular 2017 2 PDFDocument57 pagesElemento Triangular 2017 2 PDFANDRES RIVERANo ratings yet
- Analisis Matricial de Estructuras-Mohamed Mehdi HadiDocument93 pagesAnalisis Matricial de Estructuras-Mohamed Mehdi Hadijmartinez455088% (8)
- Libro Edificaciones Con Disipadores Viscosos - Opt PDFDocument133 pagesLibro Edificaciones Con Disipadores Viscosos - Opt PDFOscar Pinedo MendozaNo ratings yet
- Introduccion Curso Ingenieria Antisismica - 2012Document16 pagesIntroduccion Curso Ingenieria Antisismica - 2012Albeins Reyes Melgarejo0% (1)
- 1civ25 Ame - T6 2019-1Document5 pages1civ25 Ame - T6 2019-1Paul EscamiloNo ratings yet
- Dimensionamiento de Elementos Estructurales - Ing Carlos IralaDocument15 pagesDimensionamiento de Elementos Estructurales - Ing Carlos IralaMisaicoSairitupacKevinNo ratings yet
- Matlab en El Analisis EstructuralDocument17 pagesMatlab en El Analisis EstructuralJoselynn Salcedo Tejeda100% (1)
- Analisis de Portico 3D PDFDocument34 pagesAnalisis de Portico 3D PDFEmanuel Sifuentes100% (1)
- Modelado de Muros de Albañilería ConfinadaDocument9 pagesModelado de Muros de Albañilería ConfinadaGabriel Medina Fernandez100% (1)
- Metodo Rigidez de Seccion VariableDocument90 pagesMetodo Rigidez de Seccion VariableMateo Iban Damian Vega100% (1)
- Analisis Estructural IIDocument5 pagesAnalisis Estructural IIJIMMY_3788No ratings yet
- Trabajo Matematica AvanzadaDocument6 pagesTrabajo Matematica AvanzadaedgarNo ratings yet
- Análisis Sísmico Modal Espectral & Tiempo Historia de Una Edificación Con MATHCAD Prime, CSI SAP2000 y ETABS - CivilGeeks PDFDocument57 pagesAnálisis Sísmico Modal Espectral & Tiempo Historia de Una Edificación Con MATHCAD Prime, CSI SAP2000 y ETABS - CivilGeeks PDFwesr1956No ratings yet
- Combinación ModalDocument12 pagesCombinación ModalEdwin CahuatijoNo ratings yet
- Carrasco 2011 - Estructuras Metálicas en Elementos Finitos (PUCP+)Document102 pagesCarrasco 2011 - Estructuras Metálicas en Elementos Finitos (PUCP+)Victor Reyna AranaNo ratings yet
- Cap 7Document9 pagesCap 7Anonymous 1fKeMfwFNo ratings yet
- Mohamed Mehdi HadiDocument53 pagesMohamed Mehdi HadiHenry Valverde88% (8)
- Librocalculoestructuras IDocument40 pagesLibrocalculoestructuras ICesar Cari Flores100% (1)
- Capitulo 21 PDFDocument20 pagesCapitulo 21 PDFING.CIVILNo ratings yet
- Segunda Parte Analisis PseudotridimensionalDocument32 pagesSegunda Parte Analisis PseudotridimensionalJose Belito Belito Mancha100% (1)
- Matriz de Rigidez de Elemento Con Brazos RigidosDocument1 pageMatriz de Rigidez de Elemento Con Brazos RigidosArturo Yoshimar VillanuevaNo ratings yet
- Restrepo y Rodriguez PDFDocument10 pagesRestrepo y Rodriguez PDFjoseataviNo ratings yet
- 7 Viga Diafragma Cesar VallejoDocument18 pages7 Viga Diafragma Cesar VallejojuanobaldoNo ratings yet
- LIBRO1 FinalDocument151 pagesLIBRO1 Finalabner cusiNo ratings yet
- Silabo Análisis Estructural IIDocument2 pagesSilabo Análisis Estructural IIJhor GoicocheaNo ratings yet
- Diseno Sismico Por Desempeno 2002 PDFDocument55 pagesDiseno Sismico Por Desempeno 2002 PDFCarmen HLópezNo ratings yet
- Sesión N°05 PDFDocument22 pagesSesión N°05 PDFedgarNo ratings yet
- Diseño de Placa Maciza en Sap2000Document10 pagesDiseño de Placa Maciza en Sap2000Rutbel RuedaNo ratings yet
- Matriz de Rigidez y El. FinitosDocument18 pagesMatriz de Rigidez y El. FinitoswalterrqcNo ratings yet
- Elementos Finitos en El Análisis Estructural YamaDocument13 pagesElementos Finitos en El Análisis Estructural YamaLinda CamargoNo ratings yet
- Metodos MatricialesDocument17 pagesMetodos MatricialesKir Torres RojasNo ratings yet
- Ánálisis Matricial de Cerchas 3DDocument10 pagesÁnálisis Matricial de Cerchas 3DGuillermo GamezNo ratings yet
- Class 1Document15 pagesClass 1Joel AranaNo ratings yet
- Trabajo de A2Document32 pagesTrabajo de A2yimy valen ciaNo ratings yet
- Analisis MatricialDocument3 pagesAnalisis MatricialMiguel RomeroNo ratings yet
- Trabajo de Elementos Finitos 2019-IIDocument30 pagesTrabajo de Elementos Finitos 2019-IIManuel Calero EvangelistaNo ratings yet
- Sigfrido LogesDocument85 pagesSigfrido LogesJennifer RodriquezNo ratings yet
- Determinacion de RedundantesDocument11 pagesDeterminacion de RedundantesestebanNo ratings yet
- Informe de AnalisisDocument43 pagesInforme de AnalisisHalver de lacruzNo ratings yet
- Métodos MatricialesDocument13 pagesMétodos MatricialesJeanpier DancourtNo ratings yet
- Trabajo de Mecanica COSMOSDocument6 pagesTrabajo de Mecanica COSMOSjdavidcvNo ratings yet
- Cuestionario 2Document30 pagesCuestionario 2Dulce AlegriaNo ratings yet
- Trabajo de Elementos FinitosDocument29 pagesTrabajo de Elementos FinitosDulce AlegriaNo ratings yet
- Algebra LinealDocument12 pagesAlgebra LinealDeivid DavilaNo ratings yet
- Elementos Finitos en El Análisis EstructuralDocument16 pagesElementos Finitos en El Análisis Estructurallguerra73No ratings yet
- Examen de Ii Fase A.E Ii - Parte IiDocument13 pagesExamen de Ii Fase A.E Ii - Parte IiJordannoYañezNo ratings yet
- Matrices en La Ingenieria CivilDocument14 pagesMatrices en La Ingenieria CivilLORD TRAUMASNo ratings yet
- COMPLEMENTODocument9 pagesCOMPLEMENTOAriel plutarco cardoso herreraNo ratings yet
- Cuestionario de Ingeniería Asistida Por ComputadoraDocument9 pagesCuestionario de Ingeniería Asistida Por ComputadoraCuenta FakeNo ratings yet
- Uso de Elementos Shell y Membrane en ETABSDocument15 pagesUso de Elementos Shell y Membrane en ETABSelbander100% (3)
- Problemas de AnesmefDocument13 pagesProblemas de AnesmefJoseNo ratings yet
- U2. Modelado Geométrico y Análisis Por FEM.Document11 pagesU2. Modelado Geométrico y Análisis Por FEM.Miguel Angel CastroNo ratings yet
- Pontificia Universidad Catolica Del PeruDocument2 pagesPontificia Universidad Catolica Del PeruManuel Antonio Antón CalderónNo ratings yet
- Completen Sus PartesDocument14 pagesCompleten Sus PartesNayder MejiaNo ratings yet
- Presupuesto EncomDocument3 pagesPresupuesto EncomferdemanaperuNo ratings yet
- Letras Barra para CivilDocument2 pagesLetras Barra para CivilferdemanaperuNo ratings yet
- Plano de Ubicacion Casa de Velille-Model - PDF UltimoDocument1 pagePlano de Ubicacion Casa de Velille-Model - PDF UltimoferdemanaperuNo ratings yet
- Ejercicios Propuestos PresforzadoDocument3 pagesEjercicios Propuestos PresforzadoferdemanaperuNo ratings yet
- Estadistica CarlosDocument88 pagesEstadistica CarlosGiancarlo Salamanca ColqueNo ratings yet
- ET026 1500-1750 EsDocument60 pagesET026 1500-1750 Esluis gerardo valdez gutierrezNo ratings yet
- RESULTADOS Informe 3 DensidadesDocument7 pagesRESULTADOS Informe 3 DensidadesMariela Andagua MorenoNo ratings yet
- 12 - Regla de MezclaDocument4 pages12 - Regla de MezclaIsaac Flores OstosNo ratings yet
- Lixiviacion en AnamaDocument20 pagesLixiviacion en AnamaJuan Carlos Moreno Basilio0% (1)
- RocLab Users Guide - En.esDocument27 pagesRocLab Users Guide - En.eswily tenorio chuchonNo ratings yet
- Mantención de Camiones y Maquinarias Rev. 01Document16 pagesMantención de Camiones y Maquinarias Rev. 01Rodrigo Enrique Aburto LuengoNo ratings yet
- 3527 4003 1 PBDocument24 pages3527 4003 1 PBanderson lopezNo ratings yet
- Emayn Ficha Tecnica Az 1Document2 pagesEmayn Ficha Tecnica Az 1Jerson Ramos HuertaNo ratings yet
- NeumáticosDocument33 pagesNeumáticosArnold Miranda VilcaNo ratings yet
- Mecánica de Materiales VigasDocument6 pagesMecánica de Materiales VigasJulio César LópezNo ratings yet
- Taller CompensadoresDocument11 pagesTaller CompensadoresGabriela Portilla CastroNo ratings yet
- LJKBJKBGJKGBDocument39 pagesLJKBJKBGJKGBGaspar ToselloNo ratings yet
- Martin Mora, Angel Campos - SueñonautaDocument38 pagesMartin Mora, Angel Campos - SueñonautaRay GamiNo ratings yet
- Sistema de Propagacion y Diseño de AntenasDocument245 pagesSistema de Propagacion y Diseño de AntenasMatias AyllonNo ratings yet
- SECADODocument9 pagesSECADOEliel ChavezNo ratings yet
- ROXANADocument7 pagesROXANAJose L Huaman GasparNo ratings yet
- Rendimientos y Pruebas de Sistemas Propulsivos - Ver - Final - 2 - 1Document10 pagesRendimientos y Pruebas de Sistemas Propulsivos - Ver - Final - 2 - 1alexzaviNo ratings yet
- Libro Del GuerreroDocument22 pagesLibro Del GuerreroMaura GonzalezNo ratings yet
- Banco Hidrostático Y Propiedades de Fluidos (Bhi)Document2 pagesBanco Hidrostático Y Propiedades de Fluidos (Bhi)CdeEC FIM UMSNHNo ratings yet
- Exposicion 1 Tecnologia Del Concreto-Miriam ZeaDocument19 pagesExposicion 1 Tecnologia Del Concreto-Miriam ZeaMiluska DavalosNo ratings yet
- Actividadderepasogrado 10Document5 pagesActividadderepasogrado 10Claudia parraNo ratings yet
- Temperatura FisicaDocument11 pagesTemperatura FisicaLisbethLopezNo ratings yet
- 1 ConfortDocument7 pages1 ConfortAngeleZz GaRziiaNo ratings yet
- Teoria Del Caos (Clase 3)Document22 pagesTeoria Del Caos (Clase 3)agus maciasNo ratings yet
- LCNC - Contracción Térmica Inicial Del ConcretoDocument3 pagesLCNC - Contracción Térmica Inicial Del ConcretoLuis Casely Nina CruzNo ratings yet
- Cine TicaDocument8 pagesCine TicaCarlosNo ratings yet
- Nuevas Tendencias en El Entrenamiento ConcurrenteDocument24 pagesNuevas Tendencias en El Entrenamiento ConcurrenteKevin MarcosNo ratings yet
- Destilacion AtmosfericaDocument3 pagesDestilacion Atmosfericajaqui1992No ratings yet