You might also like
- Dynamical Systems Method for Solving Nonlinear Operator EquationsFrom EverandDynamical Systems Method for Solving Nonlinear Operator EquationsRating: 5 out of 5 stars5/5 (1)
- Dynamic Behavior of First - Second Order SystemsDocument19 pagesDynamic Behavior of First - Second Order SystemsCuong TranNo ratings yet
- Process Dynamics and Control - Ch05Document20 pagesProcess Dynamics and Control - Ch05etayhailuNo ratings yet
- AnswersDocument8 pagesAnswersMika Pelagio100% (1)
- Process Dynamics and Control 3rd Edition Chapter 12 Problem 3E SolutionDocument8 pagesProcess Dynamics and Control 3rd Edition Chapter 12 Problem 3E Solutioneduardo acunia0% (1)
- Process Dynamics and Control SolutionsDocument27 pagesProcess Dynamics and Control Solutionsciotti6209No ratings yet
- Tutorial Questions 2Document21 pagesTutorial Questions 2Lv Liska71% (7)
- Chapter 3 - Batch ProcessesDocument54 pagesChapter 3 - Batch ProcessesMuhamad Hazim Zaaba100% (1)
- Symbols and Units: Script Fonts Are Used For Physical Quantities and in Bold FontDocument127 pagesSymbols and Units: Script Fonts Are Used For Physical Quantities and in Bold FontSingh AnujNo ratings yet
- Process Dynamics and Control, Ch. 24 Solution ManualDocument27 pagesProcess Dynamics and Control, Ch. 24 Solution ManualBen Spearman100% (1)
- Signal Flow GraphDocument38 pagesSignal Flow Graphgaurav_juneja_4No ratings yet
- Seborg Process Control Chapter 1Document50 pagesSeborg Process Control Chapter 1Tanvir AhmedNo ratings yet
- University of Cambridge Department of Chemical Engineering DatabookDocument40 pagesUniversity of Cambridge Department of Chemical Engineering DatabookwaterdrinkNo ratings yet
- Exp-40 Part2Document22 pagesExp-40 Part2Ahmet Samet ÖzdilekNo ratings yet
- Mat Lab PresentationDocument6 pagesMat Lab PresentationShivamNo ratings yet
- dx10 02 3 Gen2factor PDFDocument18 pagesdx10 02 3 Gen2factor PDFELFER OBISPO GAVINONo ratings yet
- Answer For Tutorial 2Document9 pagesAnswer For Tutorial 2Mukul ParasharNo ratings yet
- rr320803 Process Dynamics and ControlDocument6 pagesrr320803 Process Dynamics and ControlSRINIVASA RAO GANTANo ratings yet
- Process Dynamics and Control SolutionsDocument27 pagesProcess Dynamics and Control Solutionsciotti6209100% (2)
- Gate 2006 PDFDocument21 pagesGate 2006 PDFVammsy Manikanta SaiNo ratings yet
- Poiseuille Flow: An Internet Book On Fluid DynamicsDocument4 pagesPoiseuille Flow: An Internet Book On Fluid DynamicsFelix EzomoNo ratings yet
- Design of HEDocument35 pagesDesign of HESaurabh SengarNo ratings yet
- Bettering Operation of Robots by Learning, Arimoto Et AlDocument18 pagesBettering Operation of Robots by Learning, Arimoto Et AlPeps Peps PepsNo ratings yet
- Certain Numerical Problems Chemical Engineering MATLABDocument44 pagesCertain Numerical Problems Chemical Engineering MATLABvadseries0% (1)
- Signal Flow DiagramsDocument20 pagesSignal Flow DiagramsSingappuliNo ratings yet
- Assignment Thermal UiTMDocument29 pagesAssignment Thermal UiTMiwe1234No ratings yet
- Process Dynamics and ControlDocument7 pagesProcess Dynamics and ControlTitilope Oreoluwa MorolariNo ratings yet
- First-Order System: Transient Response of A Thermocouple To A Step Temperature ChangeDocument3 pagesFirst-Order System: Transient Response of A Thermocouple To A Step Temperature ChangeAnand RajNo ratings yet
- PsoDocument17 pagesPsoKanishka SahniNo ratings yet
- Exam 2017 Questions SeparationsDocument12 pagesExam 2017 Questions SeparationsJules ArseneNo ratings yet
- Process Dynamics and ControlDocument31 pagesProcess Dynamics and ControlKim Joon sungNo ratings yet
- Process Dynamics and ControlDocument32 pagesProcess Dynamics and ControlJohn Ray Clarin100% (1)
- SoLucion ControlDocument63 pagesSoLucion Controllurafa1No ratings yet
- Gujarat Technological University: Bachelor of Engineering Subject Code: 150501Document4 pagesGujarat Technological University: Bachelor of Engineering Subject Code: 150501lata sinsinwarNo ratings yet
- The Bernoulli EquationDocument4 pagesThe Bernoulli Equationdether acopiadoNo ratings yet
- Weighted Residual MethodsDocument17 pagesWeighted Residual MethodsYoosef NadireeNo ratings yet
- Lecture W12 20232Document29 pagesLecture W12 2023214Adi Zawawi AzmanNo ratings yet
- Internal Forced ConvectionDocument18 pagesInternal Forced ConvectionMohd Jamal Mohd MoktarNo ratings yet
- Fluidos Cap4Document50 pagesFluidos Cap4SebastianKornejoNo ratings yet
- Mini Project For Sem I 1920Document3 pagesMini Project For Sem I 1920Nurul Izzati0% (1)
- 002general Energy Analysis of THERMODYNAMICSDocument30 pages002general Energy Analysis of THERMODYNAMICSm7sen mohammedNo ratings yet
- Ahmad, Linnhoff, Smith - Design of Multipass Heat Exchangers - An Alternative Approach (ASME) PDFDocument6 pagesAhmad, Linnhoff, Smith - Design of Multipass Heat Exchangers - An Alternative Approach (ASME) PDFjdgh1986No ratings yet
- Developing and Using Stio Tables NotesDocument27 pagesDeveloping and Using Stio Tables NotesThabangNo ratings yet
- Root Locus and Closed Loop Transfer Function CalculationDocument8 pagesRoot Locus and Closed Loop Transfer Function CalculationAkashNo ratings yet
- Resumen CH03 FelderDocument57 pagesResumen CH03 Feldercuberbill1980No ratings yet
- Multivariable Control SystemDocument39 pagesMultivariable Control SystemAmeerRashidNo ratings yet
- Viva Question For PDCDocument1 pageViva Question For PDCJunaid ParkerNo ratings yet
- Process Systems Analysis and Control - S. E. LeBlanc and D. R. CoughanowrDocument63 pagesProcess Systems Analysis and Control - S. E. LeBlanc and D. R. CoughanowrLekkala RameshNo ratings yet
- Lecture 2 - Chapter 1-Mole BalanceDocument40 pagesLecture 2 - Chapter 1-Mole BalanceNizam JumadiNo ratings yet
- MC CabeDocument18 pagesMC CabeSata AjjamNo ratings yet
- Vapor/Liquid Equilibrium: Vle by Modified Raoult'S LawDocument16 pagesVapor/Liquid Equilibrium: Vle by Modified Raoult'S LawAby JatNo ratings yet
- Process Modeling Lecture 1Document41 pagesProcess Modeling Lecture 1Virginia ElenaNo ratings yet
- Acre RTD ProblemsDocument10 pagesAcre RTD ProblemsHassan Al-AraimiNo ratings yet
- CN2116 HW11 Solution (XJP - 2012) FinalDocument9 pagesCN2116 HW11 Solution (XJP - 2012) FinalPrimus OngNo ratings yet
- Lect09-Matbal Nonreactive ProcessDocument28 pagesLect09-Matbal Nonreactive ProcessAnasua PalNo ratings yet
- Chapter 5Document20 pagesChapter 5Ana PereiraNo ratings yet
- Class20 (Second Order)Document11 pagesClass20 (Second Order)Audrey Patrick KallaNo ratings yet
- Dynamic Behavior of First-Order and Second-Order ProcessesDocument28 pagesDynamic Behavior of First-Order and Second-Order Processesحاتم غيدان خلفNo ratings yet
- Dynamic Behavior of First-Order and Second-Order ProcessesDocument28 pagesDynamic Behavior of First-Order and Second-Order Processesحاتم غيدان خلفNo ratings yet
- IC Project Charter With Example Data 8556 WORD PotraitDocument2 pagesIC Project Charter With Example Data 8556 WORD PotraitMuhaiminul IslamNo ratings yet
- Bianchi 2017Document21 pagesBianchi 2017Muhaiminul IslamNo ratings yet
- OCT-2022 Total BillDocument6 pagesOCT-2022 Total BillMuhaiminul IslamNo ratings yet
- (Final) 2022 Dec - MonthlyDocument3 pages(Final) 2022 Dec - MonthlyMuhaiminul IslamNo ratings yet
- EDL2015 Flyer A4 LOBP en WEBDocument2 pagesEDL2015 Flyer A4 LOBP en WEBMuhaiminul IslamNo ratings yet
- Why Franchise Companies Expand Overseas: ExecutiveDocument16 pagesWhy Franchise Companies Expand Overseas: ExecutiveMuhaiminul IslamNo ratings yet
- 1664 01759991229 010130006222 9jj07ik7xuDocument1 page1664 01759991229 010130006222 9jj07ik7xuMuhaiminul IslamNo ratings yet
- Artisan CouponDocument1 pageArtisan CouponMuhaiminul IslamNo ratings yet
- Shut Down Hystory For AuditDocument1 pageShut Down Hystory For AuditMuhaiminul IslamNo ratings yet
- Demand Forecasting and Determination of Optimum Product Mix in A RefineryDocument13 pagesDemand Forecasting and Determination of Optimum Product Mix in A RefineryMuhaiminul IslamNo ratings yet
- Assignment Assessment Guideline - DR - TanvirDocument8 pagesAssignment Assessment Guideline - DR - TanvirMuhaiminul IslamNo ratings yet
- Culture and International Business: Recent Advances and Their Implications For Future ResearchDocument22 pagesCulture and International Business: Recent Advances and Their Implications For Future ResearchMuhaiminul IslamNo ratings yet
- Eastern Refinery LTD.: North Patenga, ChittagongDocument1 pageEastern Refinery LTD.: North Patenga, ChittagongMuhaiminul IslamNo ratings yet
- Chlorine Agent DosingDocument1 pageChlorine Agent DosingMuhaiminul IslamNo ratings yet
- Drained Water CalculationDocument3 pagesDrained Water CalculationMuhaiminul IslamNo ratings yet
- Servicing For Spare Parts Permit Note (08.09.18)Document1 pageServicing For Spare Parts Permit Note (08.09.18)Muhaiminul IslamNo ratings yet
- Eastern Refinery Limited: North Patenga, ChittagongDocument2 pagesEastern Refinery Limited: North Patenga, ChittagongMuhaiminul IslamNo ratings yet
- Printed On: Valid TillDocument2 pagesPrinted On: Valid TillMuhaiminul IslamNo ratings yet
- Valid Till: (AM) - Manager (DGM) 2Document2 pagesValid Till: (AM) - Manager (DGM) 2Muhaiminul IslamNo ratings yet
- ProcuremenProc Plan 2017-18Document5 pagesProcuremenProc Plan 2017-18Muhaiminul IslamNo ratings yet
- HP500, 415, Brother 2320, T220Document3 pagesHP500, 415, Brother 2320, T220Muhaiminul IslamNo ratings yet
- Servicing Contract Spare Parts Note (20.09.18)Document1 pageServicing Contract Spare Parts Note (20.09.18)Muhaiminul IslamNo ratings yet
- Servicing Contract Permit Note (20.09.18)Document2 pagesServicing Contract Permit Note (20.09.18)Muhaiminul IslamNo ratings yet
- Furniture 27.01.2020Document1 pageFurniture 27.01.2020Muhaiminul IslamNo ratings yet
- Justification of Gas AnalyzerDocument1 pageJustification of Gas AnalyzerMuhaiminul IslamNo ratings yet
- Servicing Permit Note (08.09.18)Document1 pageServicing Permit Note (08.09.18)Muhaiminul IslamNo ratings yet
- Servicing Permit Note (08.09.18)Document1 pageServicing Permit Note (08.09.18)Muhaiminul IslamNo ratings yet
- Daily Operation Data SheetDocument1 pageDaily Operation Data SheetMuhaiminul IslamNo ratings yet
- Steaming of Topping Unit: Shutdown-November, 2019 Fixed Point: 01 (PM 1101 To C 1101)Document2 pagesSteaming of Topping Unit: Shutdown-November, 2019 Fixed Point: 01 (PM 1101 To C 1101)Muhaiminul IslamNo ratings yet
- Balance of PaymentDocument8 pagesBalance of PaymentMuhaiminul IslamNo ratings yet
- Full Download Short Term Financial Management 3rd Edition Maness Test BankDocument35 pagesFull Download Short Term Financial Management 3rd Edition Maness Test Bankcimanfavoriw100% (31)
- 04 SAMSS 005 Check ValvesDocument9 pages04 SAMSS 005 Check ValvesShino UlahannanNo ratings yet
- ASCE Snow Loads On Solar-Paneled RoofsDocument61 pagesASCE Snow Loads On Solar-Paneled RoofsBen100% (1)
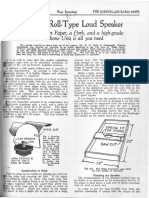
- Simple Roll-Type: A Loud SpeakerDocument1 pageSimple Roll-Type: A Loud SpeakerEudes SilvaNo ratings yet
- IPC's 2 Edition of Guidance Manual For Herbs and Herbal Products Monographs ReleasedDocument1 pageIPC's 2 Edition of Guidance Manual For Herbs and Herbal Products Monographs ReleasedRakshaNo ratings yet
- Fret Position Calculator - StewmacDocument1 pageFret Position Calculator - StewmacJuan Pablo Sepulveda SierraNo ratings yet
- TranscriptDocument1 pageTranscriptapi-310448954No ratings yet
- LPG GasDocument39 pagesLPG Gasv prasanthNo ratings yet
- Chapter 04 Product and ServDocument43 pagesChapter 04 Product and ServAlireza AlborziNo ratings yet
- 39ED3050CT - RT49S - AP Service ManualDocument31 pages39ED3050CT - RT49S - AP Service Manualبوند بوند100% (1)
- Class 12 Maths Project On Prime NumbersDocument13 pagesClass 12 Maths Project On Prime Numbersanon_3835245630% (1)
- Pref - 2 - Grammar 1.2 - Revisión Del IntentoDocument2 pagesPref - 2 - Grammar 1.2 - Revisión Del IntentoJuan M. Suarez ArevaloNo ratings yet
- Manual 35S EnglishDocument41 pagesManual 35S EnglishgugiNo ratings yet
- YellowstoneDocument1 pageYellowstoneOana GalbenuNo ratings yet
- In-Service Welding of Pipelines Industry Action PlanDocument13 pagesIn-Service Welding of Pipelines Industry Action Planعزت عبد المنعم100% (1)
- Kuiz1 210114Document12 pagesKuiz1 210114Vincent HoNo ratings yet
- Astm A194 2020Document12 pagesAstm A194 2020rolando cuadro blancoNo ratings yet
- SP 73Document105 pagesSP 73Rodrigo Vilanova100% (3)
- Banachek UnlimitedDocument34 pagesBanachek UnlimitedserenaNo ratings yet
- Pythagorean Theorem WorksheetDocument11 pagesPythagorean Theorem WorksheetJames ChanNo ratings yet
- Frontinus - Water Management of RomeDocument68 pagesFrontinus - Water Management of RomezElfmanNo ratings yet
- Accsap 10 VHDDocument94 pagesAccsap 10 VHDMuhammad Javed Gaba100% (2)
- Thermoplastic Tubing: Catalogue 5210/UKDocument15 pagesThermoplastic Tubing: Catalogue 5210/UKGeo BuzatuNo ratings yet
- Firestone & Scholl - Cognition Does Not Affect Perception, Evaluating Evidence For Top-Down EffectsDocument77 pagesFirestone & Scholl - Cognition Does Not Affect Perception, Evaluating Evidence For Top-Down EffectsRed JohnNo ratings yet
- Salem RPGDocument16 pagesSalem RPGabstockingNo ratings yet
- A Presentation On-: Dr. Nikhil Oza Intern BvdumcDocument43 pagesA Presentation On-: Dr. Nikhil Oza Intern BvdumcMaheboob GanjalNo ratings yet
- Spectroscopy (L-26 To 29)Document81 pagesSpectroscopy (L-26 To 29)Vashistha GargNo ratings yet
- Ii 2015 1Document266 pagesIi 2015 1tuni santeNo ratings yet
- RhythmDocument10 pagesRhythmSalcedo NoelNo ratings yet
- A Tired BrainDocument3 pagesA Tired BrainSivasonNo ratings yet