You might also like
- Robotics Design Process:: Unit-Iii Robot DesignDocument4 pagesRobotics Design Process:: Unit-Iii Robot DesignNithya ParanthamanNo ratings yet
- Milestone 4 Most Critical Module (MCM)Document1 pageMilestone 4 Most Critical Module (MCM)elvagojpNo ratings yet
- Programmer's Motivation for Beginners: Real Learning Stories & TipsFrom EverandProgrammer's Motivation for Beginners: Real Learning Stories & TipsRating: 5 out of 5 stars5/5 (2)
- UdacityCourse Lesson 1 2 3 4Document145 pagesUdacityCourse Lesson 1 2 3 4krishna chaitanya100% (1)
- How To Prepare Robot For Robotic CompetitionDocument19 pagesHow To Prepare Robot For Robotic CompetitionminumcincauNo ratings yet
- Learn Xcode Fast! - A Beginner's Guide To Programming in Xcode: How To Program, #3From EverandLearn Xcode Fast! - A Beginner's Guide To Programming in Xcode: How To Program, #3Rating: 1 out of 5 stars1/5 (1)
- Intro To Scrum in Under 10 MinutesDocument3 pagesIntro To Scrum in Under 10 MinutesKaramela MelakaraNo ratings yet
- Spring Assignment 2024Document12 pagesSpring Assignment 2024Soham KalburgiNo ratings yet
- S - Development/: 35 Points 1 Year AgoDocument6 pagesS - Development/: 35 Points 1 Year AgoDejan KumricNo ratings yet
- Programming in Python For Linguists A Gentle IntroductionDocument31 pagesProgramming in Python For Linguists A Gentle IntroductioneverlucyNo ratings yet
- How+to+Become+a+Web+Developer+in+4 6+months 1Document15 pagesHow+to+Become+a+Web+Developer+in+4 6+months 1Bogdan DumitruNo ratings yet
- Mini Project DesignDocument4 pagesMini Project DesignÎQbãl HãikãmNo ratings yet
- H07M DebuggingWithXcode PDFDocument9 pagesH07M DebuggingWithXcode PDFrahulmnnit_csNo ratings yet
- dataEngineerRoadmap To Make MoneyDocument19 pagesdataEngineerRoadmap To Make MoneyChristian RamiresNo ratings yet
- Answer Script: University of BedfordshireDocument13 pagesAnswer Script: University of BedfordshireAbdul NafayNo ratings yet
- Preparation 1Document13 pagesPreparation 1SuchitraNo ratings yet
- Frontend Guide Material by Arun MDocument16 pagesFrontend Guide Material by Arun Mgepiged536No ratings yet
- How To Prepare A Project Report For Your Final Year ProjectDocument5 pagesHow To Prepare A Project Report For Your Final Year ProjectRohith GowdaNo ratings yet
- Disciplined Agile Delivery: Saroj TripathiDocument4 pagesDisciplined Agile Delivery: Saroj TripathiArturo HernándezNo ratings yet
- How To Improve Your Skills As A Programmer: StepsDocument7 pagesHow To Improve Your Skills As A Programmer: StepsHarsh KhajuriaNo ratings yet
- Unit 8 Statement of AimsDocument5 pagesUnit 8 Statement of Aimsapi-651739125No ratings yet
- Physics Simulations in PythonDocument85 pagesPhysics Simulations in PythonBalendra SinghNo ratings yet
- Coursework Guide: Version HistoryDocument6 pagesCoursework Guide: Version HistoryBilly GeneNo ratings yet
- 14 Ways To Succeed at Project ManagementDocument7 pages14 Ways To Succeed at Project ManagementDiego GonzalezNo ratings yet
- Agile Project Management: Scrum for BeginnersFrom EverandAgile Project Management: Scrum for BeginnersRating: 4 out of 5 stars4/5 (7)
- SaltStack For DevOpsDocument17 pagesSaltStack For DevOpseon01No ratings yet
- Practical QA Process FlowDocument13 pagesPractical QA Process FlowMandy100% (1)
- Debugging With Visual Studio 2005: The Philosophy of DebuggingDocument9 pagesDebugging With Visual Studio 2005: The Philosophy of Debuggingrahulmnnit_csNo ratings yet
- Scrum: What You Need to Know About This Agile Methodology for Project ManagementFrom EverandScrum: What You Need to Know About This Agile Methodology for Project ManagementRating: 4.5 out of 5 stars4.5/5 (32)
- Agile PlanningDocument39 pagesAgile PlanningYerlin ReyesNo ratings yet
- Agile Project Management - Beginner - S Step by Step Guide To Learn ScrumDocument91 pagesAgile Project Management - Beginner - S Step by Step Guide To Learn ScrumbynotteNo ratings yet
- Advanced C# Programming Learning ManualDocument308 pagesAdvanced C# Programming Learning ManualThato MathabathaNo ratings yet
- A Lightning Introduction to ScrumFrom EverandA Lightning Introduction to ScrumRating: 4.5 out of 5 stars4.5/5 (3)
- Project 1: Bit HacksDocument12 pagesProject 1: Bit HacksMartinescu NicolaeNo ratings yet
- SourceDocument63 pagesSourceylananheide45No ratings yet
- Quiz 1 - Software ProcessDocument4 pagesQuiz 1 - Software ProcessRyan RobinsonNo ratings yet
- What Is Engineering ProcessDocument4 pagesWhat Is Engineering Processex4182No ratings yet
- Jira Essentials For Product OwnersDocument24 pagesJira Essentials For Product Ownersmanoj sharma100% (2)
- Learning in Artificial IntelligenceDocument8 pagesLearning in Artificial IntelligenceR Ravi Teja50% (2)
- Unit 8 Statement of AimsDocument6 pagesUnit 8 Statement of Aimsapi-638989644No ratings yet
- Beyond Effective Go: Part 1 - Achieving High-Performance CodeFrom EverandBeyond Effective Go: Part 1 - Achieving High-Performance CodeNo ratings yet
- Introduction To Mobile Robotics 6-Week Immersion Unit: Goal: Introduce Students ToDocument3 pagesIntroduction To Mobile Robotics 6-Week Immersion Unit: Goal: Introduce Students ToRio ArdianNo ratings yet
- Physics Simulations in PythonDocument85 pagesPhysics Simulations in PythonIANo ratings yet
- Itsc 2132 Object Oriented Programing: Lecture OneDocument22 pagesItsc 2132 Object Oriented Programing: Lecture OnenathyNo ratings yet
- Final Year Project GuidelinesDocument10 pagesFinal Year Project Guidelinesemingliu1No ratings yet
- An Introduction To Agile Performance ManagementDocument8 pagesAn Introduction To Agile Performance ManagementGoodRevuNo ratings yet
- Module II Problem Solving Techniques: CDS101 Introduction To ComputersDocument25 pagesModule II Problem Solving Techniques: CDS101 Introduction To ComputersAlipriya ChatterjeeNo ratings yet
- Introduction To Robotics and Robot Programming (Assignment)Document5 pagesIntroduction To Robotics and Robot Programming (Assignment)Dipon GhoshNo ratings yet
- Week 1 - Overview of ML Lifecycle and DeploymentDocument21 pagesWeek 1 - Overview of ML Lifecycle and DeploymentBhuwan BhattNo ratings yet
- Article Estimations PDFDocument9 pagesArticle Estimations PDFanadinath sharmaNo ratings yet
- EL2311 Courswork Brief With SolutionDocument5 pagesEL2311 Courswork Brief With SolutionSamreenNo ratings yet
- Business Analyst (BA), Role Based On My Experience Is Not Confined To Requirements GatheringDocument4 pagesBusiness Analyst (BA), Role Based On My Experience Is Not Confined To Requirements GatheringNikhil SatavNo ratings yet
- Lec 2 3 SW Construction and Management SEC 2070Document43 pagesLec 2 3 SW Construction and Management SEC 2070Ali Hasnat TahirNo ratings yet
- Network Hospital Paramount - 11apr19Document826 pagesNetwork Hospital Paramount - 11apr19Swapnil MishraNo ratings yet
- ARM - 30hrsDocument5 pagesARM - 30hrsSwapnil MishraNo ratings yet
- מעבדה למעגלים ספרתיים- דפי נתונים של 1N4001 DIODEDocument4 pagesמעבדה למעגלים ספרתיים- דפי נתונים של 1N4001 DIODERonNo ratings yet
- Blueboard LPC1768 Stamp V2R1Document1 pageBlueboard LPC1768 Stamp V2R1Swapnil MishraNo ratings yet
- 2N3904Document7 pages2N3904zabroma1717No ratings yet
- Ramp-Up Guide CloudPractitionerDocument3 pagesRamp-Up Guide CloudPractitionerSwapnil MishraNo ratings yet
- Datasheet Ic Regulator 3,3vDocument7 pagesDatasheet Ic Regulator 3,3vSlamet RiyadiNo ratings yet
- L 293 DDocument6 pagesL 293 DSuman Saurabh MohantyNo ratings yet
- Robotic Arm Control Using AccelerometerDocument3 pagesRobotic Arm Control Using AccelerometerSwapnil Mishra100% (1)
- Questionnaires Regarding RobotsDocument3 pagesQuestionnaires Regarding RobotsSwapnil MishraNo ratings yet
- Chapter1 IoTDocument60 pagesChapter1 IoTSwapnil Mishra100% (2)
- Gloves Control Robot Using AccelerometerDocument3 pagesGloves Control Robot Using AccelerometerSwapnil Mishra100% (1)
- Stepper Motor KietDocument2 pagesStepper Motor KietSwapnil Mishra100% (1)
- Fig 6-Jungle GymDocument1 pageFig 6-Jungle GymSwapnil MishraNo ratings yet
- SCRA Paper 3 (Maths)Document32 pagesSCRA Paper 3 (Maths)Swapnil MishraNo ratings yet
- Questionnaires Regarding RobotsDocument3 pagesQuestionnaires Regarding RobotsSwapnil MishraNo ratings yet
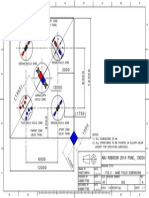
- Abu Robocon 2014 Pune, India: Seesaw Child Zone (Red Team) 4Document1 pageAbu Robocon 2014 Pune, India: Seesaw Child Zone (Red Team) 4Swapnil MishraNo ratings yet
- Dimensions of RoboconDocument1 pageDimensions of RoboconSwapnil MishraNo ratings yet
- PSU SyllabusDocument3 pagesPSU Syllabusrahaman.besu5321No ratings yet
- National Robocon Poster 2014Document1 pageNational Robocon Poster 2014Swapnil MishraNo ratings yet
- FinalDocument61 pagesFinalSwapnil MishraNo ratings yet
- AVRcam Users Manual v1 4Document31 pagesAVRcam Users Manual v1 4Cosmas EricNo ratings yet
- 4th YrDocument20 pages4th YrKaran SharmaNo ratings yet
- SCRA Paper 1 (General Ability Test) SolDocument17 pagesSCRA Paper 1 (General Ability Test) SolSwapnil MishraNo ratings yet
- Six SenseDocument7 pagesSix SenseashmitashrivasNo ratings yet
- Sixth Sense TechnologyDocument12 pagesSixth Sense TechnologySwapnil MishraNo ratings yet
- Six SenseDocument7 pagesSix SenseashmitashrivasNo ratings yet
- MTU 1 ST YEAR SYLLABUSDocument80 pagesMTU 1 ST YEAR SYLLABUSaditya7195488No ratings yet
- MCQ On ErgonomicsDocument4 pagesMCQ On Ergonomicszoom milind67% (3)
- Neuralink DocumentationDocument25 pagesNeuralink DocumentationVAIDIK Kasoju100% (6)
- Business Information Systems 2021: Cardiff Metropolitan UniversityDocument30 pagesBusiness Information Systems 2021: Cardiff Metropolitan UniversityMichelle FernandoNo ratings yet
- Chap 9 Special Rules of Court On ADR Ver 1 PDFDocument8 pagesChap 9 Special Rules of Court On ADR Ver 1 PDFambahomoNo ratings yet
- Dwnload Full Western Civilization Beyond Boundaries 7th Edition Noble Solutions Manual PDFDocument36 pagesDwnload Full Western Civilization Beyond Boundaries 7th Edition Noble Solutions Manual PDFgramendezwv100% (8)
- Security and Azure SQL Database White PaperDocument15 pagesSecurity and Azure SQL Database White PaperSteve SmithNo ratings yet
- Comparative Analysis Betwee Fast Restaurats & Five Star Hotels RestaurantsDocument54 pagesComparative Analysis Betwee Fast Restaurats & Five Star Hotels RestaurantsAman RajputNo ratings yet
- Project Level 2Document5 pagesProject Level 2Alexa GonzalezNo ratings yet
- DonatelloDocument12 pagesDonatelloGiorgia Ronfo SP GironeNo ratings yet
- Basic Foundation of Iv TherapyDocument10 pagesBasic Foundation of Iv Therapyjanna mae patriarcaNo ratings yet
- Introducing Identity - SummaryDocument4 pagesIntroducing Identity - SummarylkuasNo ratings yet
- Tips On Being A Successful StudentDocument2 pagesTips On Being A Successful Studentshimbir100% (3)
- 2 - The British Legal SystemDocument4 pages2 - The British Legal SystemSTAN GABRIELA ELENANo ratings yet
- Laser 1Document22 pagesLaser 1Mantu KumarNo ratings yet
- Robbins Ob14 PPT 11Document27 pagesRobbins Ob14 PPT 11daneshnedaieNo ratings yet
- Ethics - FinalsDocument18 pagesEthics - Finalsannie lalangNo ratings yet
- The Christ of NankingDocument7 pagesThe Christ of NankingCarlos PérezNo ratings yet
- Handout For Chapters 1-3 of Bouchaud: 1 DenitionsDocument10 pagesHandout For Chapters 1-3 of Bouchaud: 1 DenitionsStefano DucaNo ratings yet
- Final Draft Basel II DissertationDocument110 pagesFinal Draft Basel II DissertationWilliam Weru80% (5)
- Project Procurement Management: 1 WWW - Cahyo.web - Id IT Project Management, Third Edition Chapter 12Document28 pagesProject Procurement Management: 1 WWW - Cahyo.web - Id IT Project Management, Third Edition Chapter 12cahyodNo ratings yet
- Grammar Exercises AnswersDocument81 pagesGrammar Exercises Answerspole star107100% (1)
- Review of Related LiteratureDocument5 pagesReview of Related LiteratureRJ PareniaNo ratings yet
- NefelometriaDocument25 pagesNefelometriaJuan Marcos Martinez ZevallosNo ratings yet
- Assignment 1 TVM, Bonds StockDocument2 pagesAssignment 1 TVM, Bonds StockMuhammad Ali SamarNo ratings yet
- All New Keys DictionaryDocument7 pagesAll New Keys DictionaryvishntNo ratings yet
- Novel Synthesis of BarbituratesDocument3 pagesNovel Synthesis of BarbituratesRafaella Ferreira100% (2)
- Finlatics Investment Banking Experience ProgramDocument4 pagesFinlatics Investment Banking Experience ProgramSameer BheriNo ratings yet
- Anesthesia Considerations in Microlaryngoscopy or Direct LaryngosDocument6 pagesAnesthesia Considerations in Microlaryngoscopy or Direct LaryngosRubén Darío HerediaNo ratings yet
- Cry The Beloved CountryDocument6 pagesCry The Beloved CountryDaniel RañolaNo ratings yet
- Operate A Word Processing Application BasicDocument46 pagesOperate A Word Processing Application Basicapi-24787158267% (3)