You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Manifest Your Desires with The Quantum CookbookDocument14 pagesManifest Your Desires with The Quantum CookbookAgarta1111No ratings yet
- Mathematics and RealityDocument13 pagesMathematics and RealityIan Thorpe100% (1)
- Dane Rudhyar - The Planets and Their Symbols - MARCADODocument13 pagesDane Rudhyar - The Planets and Their Symbols - MARCADOLuiza Machado100% (2)
- Analisis Edificio FEMA P-752 - Unit4Document505 pagesAnalisis Edificio FEMA P-752 - Unit4alexmolina3No ratings yet
- Fundamentals of the Pickett Plot: Recognizing Reservoir PatternsDocument9 pagesFundamentals of the Pickett Plot: Recognizing Reservoir PatternsAngelMeso100% (1)
- Mock Tests 20 20 Class 9 Science SampleDocument13 pagesMock Tests 20 20 Class 9 Science SamplesrilathaNo ratings yet
- Winitzki - Heidelberg Lectures On Advanced General Relativity 2007Document156 pagesWinitzki - Heidelberg Lectures On Advanced General Relativity 2007winitzkiNo ratings yet
- Two Dimensional Numerical and Experimental Models For The Study of Structure-Soil-Structure Interaction Involving Three BuildingsDocument14 pagesTwo Dimensional Numerical and Experimental Models For The Study of Structure-Soil-Structure Interaction Involving Three BuildingsAlejandro PérezNo ratings yet
- Evaluation of Interaction Effects On The System Period and The System Damping Due To Foundation Embedment and Layer Depth - IMPORTANTEDocument17 pagesEvaluation of Interaction Effects On The System Period and The System Damping Due To Foundation Embedment and Layer Depth - IMPORTANTEAlejandro PérezNo ratings yet
- Tension Design ExamplesDocument6 pagesTension Design ExamplesAgung SugiyatnoNo ratings yet
- A Discrete Model For Response Estimation of Soil-Structure Systems With Embedded FoundationsDocument14 pagesA Discrete Model For Response Estimation of Soil-Structure Systems With Embedded FoundationsAlejandro PérezNo ratings yet
- Sublimation and Melting Point DeterminationDocument3 pagesSublimation and Melting Point DeterminationRhone RoqueNo ratings yet
- Compressive Strength of Hydraulic Cement Mortars (Using 2-In. or (50-mm) Cube Specimens)Document9 pagesCompressive Strength of Hydraulic Cement Mortars (Using 2-In. or (50-mm) Cube Specimens)Jesús Luis Arce GuillermoNo ratings yet
- Docking With ArgusLabDocument24 pagesDocking With ArgusLabDesmond MacLeod Carey100% (1)
- T3-Revision-Internal-ResistanceDocument22 pagesT3-Revision-Internal-Resistancejordan2gardnerNo ratings yet
- Shoot For Your Grade Lab Write UpDocument5 pagesShoot For Your Grade Lab Write Upapi-254812059No ratings yet
- Improve Steel Quality with Electromagnetic StirrersDocument4 pagesImprove Steel Quality with Electromagnetic Stirrerst_pradipNo ratings yet
- Induction Heating - VerDocument2 pagesInduction Heating - Verdenivaldo2009No ratings yet
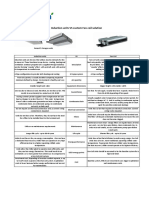
- HotelSolution: Induction Units VS Fan-Coil SolutionDocument1 pageHotelSolution: Induction Units VS Fan-Coil SolutionMoriyasu NguyenNo ratings yet
- 2015-04-21 - 3 - LPE Firemans SyllabusDocument9 pages2015-04-21 - 3 - LPE Firemans SyllabusSumanNo ratings yet
- Developing a Solar-Biomass Integrated Drying System for SpicesDocument30 pagesDeveloping a Solar-Biomass Integrated Drying System for SpicesSantosh AngadiNo ratings yet
- Rectilinear Motion and Rotating VesselDocument4 pagesRectilinear Motion and Rotating VesselJack PresadoNo ratings yet
- Topic 4 - Probability (Old Notes)Document22 pagesTopic 4 - Probability (Old Notes)Pradeep100% (1)
- Astm F1717-21Document11 pagesAstm F1717-21wenhsiaochuanNo ratings yet
- Review: Modeling Damping in Mechanical Engineering StructuresDocument10 pagesReview: Modeling Damping in Mechanical Engineering Structuresuamiranda3518No ratings yet
- Topic 1Document17 pagesTopic 1Trịnh Tuấn HiềnNo ratings yet
- Atomic absorption spectroscopy analysis of metalsDocument3 pagesAtomic absorption spectroscopy analysis of metalsVishnu VichuZNo ratings yet
- Fjbzr6wn50 - Class 7 Timetable - Fua 2024Document2 pagesFjbzr6wn50 - Class 7 Timetable - Fua 2024mrs.prernajainNo ratings yet
- TCL Air Conditioner Service ManualDocument138 pagesTCL Air Conditioner Service ManualFabian EtcheniqueNo ratings yet
- 079322C Int MR LD Int 1543 0004 3427 01Document1 page079322C Int MR LD Int 1543 0004 3427 01bolat.kukuzovNo ratings yet
- GEC 104 Week 1 Lesson 1 Math Modern WorldDocument4 pagesGEC 104 Week 1 Lesson 1 Math Modern WorldJahnna Marie PomaresNo ratings yet
- Abdel Jawad 2005Document8 pagesAbdel Jawad 2005Alberto Tupa OrtizNo ratings yet
- The Physics of Lorentz Transformation (A Simple Derivation of Lorentz Transformation)Document5 pagesThe Physics of Lorentz Transformation (A Simple Derivation of Lorentz Transformation)Glen PeachNo ratings yet
- Alpha 900 and HD LineDocument32 pagesAlpha 900 and HD Linebertan dağıstanlıNo ratings yet
- Atlas Copco: Parts ListDocument152 pagesAtlas Copco: Parts ListChathura SenanayakeNo ratings yet