You might also like
- Following Is The Verilog Code For FlipDocument26 pagesFollowing Is The Verilog Code For FlipDivya MuraliNo ratings yet
- Digital Signal Processing: A Practical Guide for Engineers and ScientistsFrom EverandDigital Signal Processing: A Practical Guide for Engineers and ScientistsRating: 4.5 out of 5 stars4.5/5 (7)
- Pioneer Avic-5100nex 6100nex f970bt Crt5701Document268 pagesPioneer Avic-5100nex 6100nex f970bt Crt5701boroda2410No ratings yet
- Matlab Exercises To Explain Discrete Fourier Transforms PDFDocument9 pagesMatlab Exercises To Explain Discrete Fourier Transforms PDFsenthil kumarNo ratings yet
- Ece V Digital Signal Processing (10ec52) NotesDocument160 pagesEce V Digital Signal Processing (10ec52) NotesVijay SaiNo ratings yet
- FFT VHDLDocument28 pagesFFT VHDLRaheetha AhmedNo ratings yet
- DSPDocument94 pagesDSPRasha Hassan0% (1)
- Digital Signal ProcessingDocument101 pagesDigital Signal ProcessingDheekshith ShettigaraNo ratings yet
- Assignment 2Document2 pagesAssignment 2RAHUL AGARWAL100% (1)
- Digital Signal Processing for Audio Applications: Volume 1 - FormulaeFrom EverandDigital Signal Processing for Audio Applications: Volume 1 - FormulaeNo ratings yet
- Eee-Vi-Digital Signal Processing (10ee64) - Notes PDFDocument150 pagesEee-Vi-Digital Signal Processing (10ee64) - Notes PDFLakshmi Oruganti85% (20)
- list iptv 18+ by Tín NguyễnDocument35 pageslist iptv 18+ by Tín NguyễnNguyễn Tín39% (18)
- Department of Electronics and Communication Engineering: Digital Signal ProcessingDocument25 pagesDepartment of Electronics and Communication Engineering: Digital Signal ProcessingSETNHILNo ratings yet
- DSP Two Marks - Unit I-IVDocument27 pagesDSP Two Marks - Unit I-IVDhariniNo ratings yet
- DSP Solved Question BankDocument19 pagesDSP Solved Question Banksakshi_kapuriaNo ratings yet
- 9 HRTHDocument22 pages9 HRTHNithindev GuttikondaNo ratings yet
- EC2302 QB PDFDocument22 pagesEC2302 QB PDFokhtayaNo ratings yet
- EC8553 2marksDocument20 pagesEC8553 2marksSNo ratings yet
- Two Marks DSPDocument16 pagesTwo Marks DSPReeshma.GogulaNo ratings yet
- Digital Signal Processing Two MarksDocument11 pagesDigital Signal Processing Two MarksDelphin ShibinNo ratings yet
- Digital Signal Processing Two Mark Question With Answer Unit IIIDocument4 pagesDigital Signal Processing Two Mark Question With Answer Unit IIIsarathbabumjNo ratings yet
- Digital Signal Processing 10EC52Document50 pagesDigital Signal Processing 10EC52Ratish NairNo ratings yet
- Ece Odd9Document17 pagesEce Odd9Venkat MuruganNo ratings yet
- University 2 Marks Ans DTSSPDocument5 pagesUniversity 2 Marks Ans DTSSPsanth_213No ratings yet
- Course Material (Question Bamk)Document4 pagesCourse Material (Question Bamk)Guna PriyaNo ratings yet
- DSPP Comprehensice Question BankDocument14 pagesDSPP Comprehensice Question BankAbhishek PandeyNo ratings yet
- Digital Signal Processing (DSP)Document0 pagesDigital Signal Processing (DSP)www.bhawesh.com.npNo ratings yet
- Digital Signal Processing (DSP) - Jeppiar CollegeDocument22 pagesDigital Signal Processing (DSP) - Jeppiar CollegeKarthi KeyanNo ratings yet
- Course Material (Question Bamk)Document4 pagesCourse Material (Question Bamk)lakshmiNo ratings yet
- DSP Te1 Answer KeyDocument21 pagesDSP Te1 Answer KeyshankarNo ratings yet
- Questions Bank For DSPDocument27 pagesQuestions Bank For DSPArchana OgaleNo ratings yet
- Digital Signal Processing 10EC52: - A Unit - 1Document160 pagesDigital Signal Processing 10EC52: - A Unit - 1Ramya C.N.100% (1)
- Ece V Digital Signal Processing (10ec52) NotesDocument161 pagesEce V Digital Signal Processing (10ec52) NotesrafeshNo ratings yet
- DSP 2 MarksDocument20 pagesDSP 2 MarksSanthosh SandyNo ratings yet
- Digital Signal Processing: Unit-1 and 2: Discrete Fourier TransformsDocument5 pagesDigital Signal Processing: Unit-1 and 2: Discrete Fourier TransformsjpsridharNo ratings yet
- Ec 2302 - DSPDocument49 pagesEc 2302 - DSPShyam SundarNo ratings yet
- DTSP 2marks PDFDocument20 pagesDTSP 2marks PDFishuNo ratings yet
- Ece V Digital Signal Processing (10ec52) NotesDocument161 pagesEce V Digital Signal Processing (10ec52) NotesDenise Nelson100% (1)
- DSP Question BankDocument5 pagesDSP Question Bank19R21A04H8 VANKA AJAY BABUNo ratings yet
- 2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CseDocument18 pages2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CsehariharankalyanNo ratings yet
- DSP 2marksDocument22 pagesDSP 2marksSuneelkrishna RallabhandiNo ratings yet
- AN4255Document43 pagesAN4255Achriyatul SetyoriniNo ratings yet
- Implementation of FFT by Using Matlab: Simulink On Xilinx Virtex-4 Fpgas: Performance of A Paired Transform Based FFTDocument7 pagesImplementation of FFT by Using Matlab: Simulink On Xilinx Virtex-4 Fpgas: Performance of A Paired Transform Based FFTKevin McintoshNo ratings yet
- DSP and Power System ProtectionDocument11 pagesDSP and Power System ProtectionsegamegaNo ratings yet
- DSP Algorithm and Architecture PDFDocument199 pagesDSP Algorithm and Architecture PDFBheemareddiNo ratings yet
- Oral Questions On DSP 2020-21Document41 pagesOral Questions On DSP 2020-21Pratibha VermaNo ratings yet
- Discrete Fourier Transform (DFT) : Dr. Parul Tyagi (Asso. Prof.) & Dr. Neha Singh (Asst. Prof.)Document65 pagesDiscrete Fourier Transform (DFT) : Dr. Parul Tyagi (Asso. Prof.) & Dr. Neha Singh (Asst. Prof.)Rõçky StrâñgëNo ratings yet
- DSP 2 Marks Q&a1Document38 pagesDSP 2 Marks Q&a1shankarNo ratings yet
- Fast Fourier Transform (FFT)Document25 pagesFast Fourier Transform (FFT)Jagdeep RahulNo ratings yet
- Biomedical Signal ProcessingDocument72 pagesBiomedical Signal Processingapi-19807868No ratings yet
- DSP Two MarksDocument33 pagesDSP Two MarksVijayendiran RhNo ratings yet
- DSP Lecture NotesDocument24 pagesDSP Lecture Notesvinothvin86No ratings yet
- 2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CseDocument18 pages2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CseprawinpsgNo ratings yet
- TC-212 DSPDocument43 pagesTC-212 DSPbakNo ratings yet
- DSP Asignment1 - ID - 117020990036Document20 pagesDSP Asignment1 - ID - 117020990036FRANCK MOREL BENE FANKEMNo ratings yet
- Question and AnseeDocument30 pagesQuestion and AnseeAshfaaq OchatoyaNo ratings yet
- DSP-Manual - R19Document74 pagesDSP-Manual - R19Ragha RamojuNo ratings yet
- DFT and FFT Chapter 6Document45 pagesDFT and FFT Chapter 6Egyptian BookstoreNo ratings yet
- Week 6Document12 pagesWeek 6vidishashukla03No ratings yet
- 18ee63 DSP Module-3Document19 pages18ee63 DSP Module-3Appasabgouda BiradarNo ratings yet
- Digital Signal Processing Techniques and Applications in Radar Image ProcessingFrom EverandDigital Signal Processing Techniques and Applications in Radar Image ProcessingNo ratings yet
- SC 2mark Material EditedDocument20 pagesSC 2mark Material EditedvinothNo ratings yet
- Wireless and Mobile Communication - SyllabusDocument1 pageWireless and Mobile Communication - SyllabusvinothNo ratings yet
- DESDocument2 pagesDESvinothNo ratings yet
- MATLAB and The File SystemDocument13 pagesMATLAB and The File SystemvinothNo ratings yet
- Suresha - AbstractDocument2 pagesSuresha - AbstractvinothNo ratings yet
- FormulasDocument1 pageFormulasvinothNo ratings yet
- DSP Cycle I & IiDocument88 pagesDSP Cycle I & IivinothNo ratings yet
- Development of Radio Journalism and Television JournalismDocument5 pagesDevelopment of Radio Journalism and Television JournalismAtul MumbarkarNo ratings yet
- Question Bank - 2131004 - DE - New - 11082016 - 075548AMDocument5 pagesQuestion Bank - 2131004 - DE - New - 11082016 - 075548AMRutvik JaniNo ratings yet
- TRBOnet Swift Agent A002.M1 User Guide ENGDocument29 pagesTRBOnet Swift Agent A002.M1 User Guide ENGRafael Jaimes SilvaNo ratings yet
- OP-GONT 90211VW - With VOIPDocument3 pagesOP-GONT 90211VW - With VOIPGururaj Revankar0% (1)
- Communication System TC-307: EL, Lecture 7, Week 3 Course Instructor: Nida NasirDocument58 pagesCommunication System TC-307: EL, Lecture 7, Week 3 Course Instructor: Nida NasirAhmad IrfanNo ratings yet
- Service Manual: ICF-C411Document20 pagesService Manual: ICF-C411Luis Pavia MarquesNo ratings yet
- Asus A88xm Plus RepairDocument6 pagesAsus A88xm Plus RepairErmin PinangNo ratings yet
- AUDISON Bit-Drive Product-Info 17BDocument16 pagesAUDISON Bit-Drive Product-Info 17BErwin HernandezNo ratings yet
- C DOT DSS MAX Maintenance Procedures PDFDocument186 pagesC DOT DSS MAX Maintenance Procedures PDFVenkata RamanaNo ratings yet
- AVR2106 DFU OwnersmanualDocument72 pagesAVR2106 DFU Ownersmanualchelib mdNo ratings yet
- Philips 6-IE550/ V Interstage Slope EqualizersDocument4 pagesPhilips 6-IE550/ V Interstage Slope Equalizersjose angel guzman lozanoNo ratings yet
- Transport LayerDocument87 pagesTransport LayerDHANYASRI BOLLANo ratings yet
- Philips Dcm5090 Ver.1.0Document19 pagesPhilips Dcm5090 Ver.1.0MantasPuskoriusNo ratings yet
- Plusnet Handbook PDFDocument13 pagesPlusnet Handbook PDFFredNo ratings yet
- NI - Digital I - O For Test, Control, and DesignDocument6 pagesNI - Digital I - O For Test, Control, and DesignbioNo ratings yet
- Analysis and Design of Series Combining Transformers For Integrated Doherty Power AmplifiersDocument4 pagesAnalysis and Design of Series Combining Transformers For Integrated Doherty Power Amplifiersreddy balajiNo ratings yet
- What Is A Medianet?: Executive SummaryDocument13 pagesWhat Is A Medianet?: Executive SummaryGoranLazniNo ratings yet
- TRBOnet PLUS User Manual v6.1 PDFDocument399 pagesTRBOnet PLUS User Manual v6.1 PDFlazib koceilaNo ratings yet
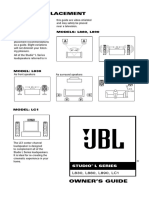
- StudioL830, L880, L890, LC1 OMDocument4 pagesStudioL830, L880, L890, LC1 OMfernando.pagnottaNo ratings yet
- Install LCTDocument56 pagesInstall LCTAnonymous lVLZ1ukcNo ratings yet
- 1Document2 pages1Cristel BautistaNo ratings yet
- A en SC05 Slimline v4 0 Installation and MaintenanceDocument140 pagesA en SC05 Slimline v4 0 Installation and MaintenanceDERRINGERNo ratings yet
- C4+ (PGN-403) Service ManualDocument29 pagesC4+ (PGN-403) Service ManualncirNo ratings yet
- Cns Lab 3Document9 pagesCns Lab 3towhidulNo ratings yet
- FortiOS 6.0 HandbookDocument2,719 pagesFortiOS 6.0 HandbookCarlos GomezNo ratings yet
- Radio CommandsDocument3 pagesRadio CommandsMangata AcaronarNo ratings yet