You might also like
- Review On Robust Control For SISO SystemsDocument7 pagesReview On Robust Control For SISO Systemsrodrigo_trentiniNo ratings yet
- H As Se N: Feedback Control System Characteristics and PerformanceDocument11 pagesH As Se N: Feedback Control System Characteristics and PerformanceYash maullooNo ratings yet
- EEE338A FeedBack CharacteristicsDocument19 pagesEEE338A FeedBack CharacteristicsKenvyl PhamNo ratings yet
- Week 4Document55 pagesWeek 4Raising StarNo ratings yet
- Week 3Document38 pagesWeek 3Raising StarNo ratings yet
- Solutions To Selected Problems in Chapter 5: 1 Problem 5.1Document13 pagesSolutions To Selected Problems in Chapter 5: 1 Problem 5.10721673895No ratings yet
- Control Crash CourseDocument41 pagesControl Crash Courseraa2010No ratings yet
- IN 227 Control Systems DesignDocument11 pagesIN 227 Control Systems DesignAbhinavNo ratings yet
- A Performance Comparison of Robust Adaptive Controllers: Linear SystemsDocument26 pagesA Performance Comparison of Robust Adaptive Controllers: Linear SystemsNacer LabedNo ratings yet
- Lecture 9-10 - Frequency Response MethodsDocument68 pagesLecture 9-10 - Frequency Response MethodsDerrick Maatla Moadi100% (1)
- 11 Gain SchedulingDocument8 pages11 Gain Schedulingstathiss11No ratings yet
- Notes-Nyquist Plot and Stability CriteriaDocument16 pagesNotes-Nyquist Plot and Stability CriteriaGanesh RadharamNo ratings yet
- C2 Sdof2 PDFDocument20 pagesC2 Sdof2 PDFArThur BangunNo ratings yet
- Objectives: Chapter 4: Feedback Control System CharacteristicsDocument17 pagesObjectives: Chapter 4: Feedback Control System CharacteristicsNikhil V NainoorNo ratings yet
- IN 227 Control Systems Design: Lectures 7 and 8Document15 pagesIN 227 Control Systems Design: Lectures 7 and 8AbhinavNo ratings yet
- I. Concepts and Tools: Mathematics For Dynamic SystemsDocument48 pagesI. Concepts and Tools: Mathematics For Dynamic SystemsRaveendhra IitrNo ratings yet
- EP 5511 - Lecture 07Document33 pagesEP 5511 - Lecture 07Solomon Tadesse AthlawNo ratings yet
- IN 227 Control Systems Design Lecture 19 on Non-Minimum Phase SystemsDocument12 pagesIN 227 Control Systems Design Lecture 19 on Non-Minimum Phase SystemsAbhinavNo ratings yet
- Disturbance Rejection and Noise Attenuation:: Control 1, Second MaterialDocument5 pagesDisturbance Rejection and Noise Attenuation:: Control 1, Second MaterialKaram AlmasriNo ratings yet
- ELEC4410 Control System Design Revision NotesDocument10 pagesELEC4410 Control System Design Revision Notescjman404No ratings yet
- Electrical Engineering Engineering Control Systems Stability in The Frequency Domain NotesDocument13 pagesElectrical Engineering Engineering Control Systems Stability in The Frequency Domain NotesSwapnil Gade007No ratings yet
- Chapter 4Document17 pagesChapter 4CarlosCD17No ratings yet
- PID control for improved damping and zero steady state errorDocument2 pagesPID control for improved damping and zero steady state errorGiri KandeNo ratings yet
- Capitulo 3 (Ackermanf)Document20 pagesCapitulo 3 (Ackermanf)Gabyta XikitaaNo ratings yet
- Control System Manual 1 To 5Document23 pagesControl System Manual 1 To 5Eashan PendseNo ratings yet
- OPERATION IN SYSTEMDocument16 pagesOPERATION IN SYSTEMHerdy Sang JuaraNo ratings yet
- Vib Meas Ins11Document12 pagesVib Meas Ins11113314No ratings yet
- Digital Control System - CompressedDocument18 pagesDigital Control System - CompressedSukhpal SinghNo ratings yet
- Lecture 04 Feedback Control System CharacteristicsDocument23 pagesLecture 04 Feedback Control System Characteristicscesar ruizNo ratings yet
- Block Diagram and The Closed-Loop Response: P D M C FDocument7 pagesBlock Diagram and The Closed-Loop Response: P D M C Fd_k_ÜNo ratings yet
- Lab 9a. Linear Predictive Coding For Speech Processing: Vocal Tract Parameters Pitch Period Voiced/Unvoiced Speech SwitchDocument5 pagesLab 9a. Linear Predictive Coding For Speech Processing: Vocal Tract Parameters Pitch Period Voiced/Unvoiced Speech SwitchHamouda AzzouzNo ratings yet
- Automatic Control Systems TheoryDocument9 pagesAutomatic Control Systems TheoryJames KabugoNo ratings yet
- Chap7 Digital FilterDocument18 pagesChap7 Digital FilterAzeem AliNo ratings yet
- Disturbance Observer DesignDocument15 pagesDisturbance Observer DesignEdmund Luke Benedict SimpsonNo ratings yet
- Ta Proj 1 ReportlDocument12 pagesTa Proj 1 ReportlshaheerdurraniNo ratings yet
- Gate Control QuestionsDocument4 pagesGate Control QuestionsAtanuMajiNo ratings yet
- Control Engineering Frequency Response AnalysisDocument27 pagesControl Engineering Frequency Response AnalysisRidir ZolkefleNo ratings yet
- Topic 3-Part 2-Frequency ResponseDocument54 pagesTopic 3-Part 2-Frequency ResponseBautista, Aljhon G.No ratings yet
- Thuật Toán Điều Khiển1Document23 pagesThuật Toán Điều Khiển1Văn Nghĩa NguyễnNo ratings yet
- 04 Handout 1 (Feedback)Document11 pages04 Handout 1 (Feedback)Kathleen Anne MendozaNo ratings yet
- Sliding Mode-: Modulation Control of A "Buck" ConverterDocument6 pagesSliding Mode-: Modulation Control of A "Buck" ConverterFarag AlargtNo ratings yet
- Bangladesh University of Engineering and TechnologyDocument10 pagesBangladesh University of Engineering and Technologyabbas uddinNo ratings yet
- Control Systems AssignmentDocument10 pagesControl Systems AssignmentBrightNo ratings yet
- Frequency ResponseDocument30 pagesFrequency ResponseGovind KumarNo ratings yet
- C.7 Sliding ControlDocument7 pagesC.7 Sliding ControlNhật NguyễnNo ratings yet
- Steady State ErrorDocument26 pagesSteady State ErrorAnonymous 4PTbXjPuZNo ratings yet
- Backwoods Control TheoryDocument18 pagesBackwoods Control TheoryakozyNo ratings yet
- Control System PracticalDocument19 pagesControl System PracticalYashNo ratings yet
- ME5012 - Electronic Systems, Control and ComputingDocument9 pagesME5012 - Electronic Systems, Control and ComputingMounir MikhaelNo ratings yet
- Military Institute of Science & Technology: Experiment No. 8Document10 pagesMilitary Institute of Science & Technology: Experiment No. 8ramisa rizwanNo ratings yet
- Control System - Position Control SystemDocument4 pagesControl System - Position Control SystemAnas Elgaud100% (1)
- Modelling Discrete Time SystemsDocument6 pagesModelling Discrete Time SystemsSandeep KumarNo ratings yet
- 6 - Time Response Analysis 2Document21 pages6 - Time Response Analysis 2حساب ويندوزNo ratings yet
- Frequency Response AnalysisDocument29 pagesFrequency Response AnalysisAravindh NatarajanNo ratings yet
- Frequency-Domain Analysis of Dynamic SystemsDocument27 pagesFrequency-Domain Analysis of Dynamic SystemsmoomeejeeNo ratings yet
- Internal Model Control: Part of A Set of Lecture Notes On Introduction To Robust Control by Ming T. Tham (2002)Document9 pagesInternal Model Control: Part of A Set of Lecture Notes On Introduction To Robust Control by Ming T. Tham (2002)jimi7No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- My Sample ResumeDocument2 pagesMy Sample ResumejayantabhbasuNo ratings yet
- TaliDocument3 pagesTalijayantabhbasuNo ratings yet
- GATE 2013 Electrical Engineering Previous Year Paper PDFDocument20 pagesGATE 2013 Electrical Engineering Previous Year Paper PDFArif Hussain AlamNo ratings yet
- Childrens Timetable Term 1 2009Document1 pageChildrens Timetable Term 1 2009jayantabhbasuNo ratings yet
- Tutorial On Fuzzy LogicDocument20 pagesTutorial On Fuzzy LogicnsadnanNo ratings yet
- Energy Scenario of IndiaDocument2 pagesEnergy Scenario of IndiajayantabhbasuNo ratings yet
- Ps2 QuestionDocument2 pagesPs2 QuestionjayantabhbasuNo ratings yet
- 25 Questions With AnswersDocument6 pages25 Questions With AnswersjayantabhbasuNo ratings yet
- Electrical EngineeringDocument2 pagesElectrical EngineeringSantosh SandyNo ratings yet
- TaliDocument3 pagesTalijayantabhbasuNo ratings yet
- Fuzzy Logic DataDocument8 pagesFuzzy Logic DataramachandraNo ratings yet
- PF Rules For EmployersDocument2 pagesPF Rules For EmployersPankaj JaswalNo ratings yet
- TaliDocument3 pagesTalijayantabhbasuNo ratings yet
- HarmonicsDocument2 pagesHarmonicsjayantabhbasuNo ratings yet
- The Main Effects of Harmonics in InstallationsDocument1 pageThe Main Effects of Harmonics in InstallationsjayantabhbasuNo ratings yet
- Simple Weekly ScheduleDocument2 pagesSimple Weekly SchedulejayantabhbasuNo ratings yet
- Remote Switches - Instructions ManualDocument6 pagesRemote Switches - Instructions ManualjayantabhbasuNo ratings yet
- Abstract Submission Form For ELECRAMADocument2 pagesAbstract Submission Form For ELECRAMAcoep05No ratings yet
- Syllabus PDFDocument9 pagesSyllabus PDFevsgoud_goudNo ratings yet
- Study of Transient Stability by Transient Energy FunctionDocument9 pagesStudy of Transient Stability by Transient Energy FunctionCS & ITNo ratings yet
- Transient Stability Analysis of Wind Integrated Power Systems With Central Area ControlleDocument6 pagesTransient Stability Analysis of Wind Integrated Power Systems With Central Area ControllejayantabhbasuNo ratings yet
- Dimensions of Energy ManagementDocument7 pagesDimensions of Energy ManagementjayantabhbasuNo ratings yet
- IMPORTANT QUESTION IN ELECTRICAL ENGG FOR ASSISTANT ENGINEER EXAMS OF UPRVUNL, UPPCL, MPPKVVNL, HPPSC, IES, GATE and Other State Psus.Document223 pagesIMPORTANT QUESTION IN ELECTRICAL ENGG FOR ASSISTANT ENGINEER EXAMS OF UPRVUNL, UPPCL, MPPKVVNL, HPPSC, IES, GATE and Other State Psus.Rishi Kant Sharma100% (1)
- IntroductionDocument5 pagesIntroductionjayantabhbasuNo ratings yet
- Kusb-3100 Series DsDocument7 pagesKusb-3100 Series DsjayantabhbasuNo ratings yet
- Fuzzy Logic DataDocument8 pagesFuzzy Logic DataramachandraNo ratings yet
- Electrical & Machanical DegreeDocument2 pagesElectrical & Machanical DegreejayantabhbasuNo ratings yet
- Fleming's Right-Hand Rule: This Rule Is Used To Determine TheDocument1 pageFleming's Right-Hand Rule: This Rule Is Used To Determine ThejayantabhbasuNo ratings yet
- Evolution of Computers from Vacuum Tubes to Integrated CircuitsDocument6 pagesEvolution of Computers from Vacuum Tubes to Integrated CircuitsjayantabhbasuNo ratings yet
- The 4 - 95 Stirling Engine For Underwater ApplicationDocument4 pagesThe 4 - 95 Stirling Engine For Underwater ApplicationVladimirDvortsovNo ratings yet
- QCAI476 LfiltersDocument11 pagesQCAI476 LfilterscivodulNo ratings yet
- Supersafari - 2 Activity BookDocument99 pagesSupersafari - 2 Activity BookShwe Yee Thet paingNo ratings yet
- TAM Acquisition and Analysis ManualDocument92 pagesTAM Acquisition and Analysis ManualJulian UribeNo ratings yet
- BSC Agri Engineering Course OutlineDocument117 pagesBSC Agri Engineering Course OutlineFarhanAwaisiNo ratings yet
- Centrifugal Vs Reciprocating Compressor - Turbomachinery Magazine PDFDocument2 pagesCentrifugal Vs Reciprocating Compressor - Turbomachinery Magazine PDFReyes SanchezNo ratings yet
- Hands On PythonDocument240 pagesHands On PythonAmol MunaseNo ratings yet
- Pro Line FusionDocument8 pagesPro Line FusionГригорий Омельченко50% (2)
- Barden Speciality Products Us enDocument73 pagesBarden Speciality Products Us enjonasmcgee2345No ratings yet
- Burnaby Fire Department - Evidentiary PaperDocument96 pagesBurnaby Fire Department - Evidentiary PaperNationalObserverNo ratings yet
- PJM535 StudentCourseSyllabusDocument7 pagesPJM535 StudentCourseSyllabusRonald McflurryNo ratings yet
- LDR Valu ChainDocument5 pagesLDR Valu ChainSheila EnglishNo ratings yet
- Sample BoqDocument144 pagesSample BoqDarren Dela CruzNo ratings yet
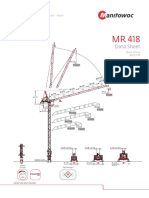
- MR418-FEM-Top Slewing Tower Cranes Imperial PDFDocument8 pagesMR418-FEM-Top Slewing Tower Cranes Imperial PDFCompass equipmentNo ratings yet
- 59E Agitator Seals in Chemical-En-18.09.2008Document24 pages59E Agitator Seals in Chemical-En-18.09.2008Daniel CostaNo ratings yet
- SanskritiDocument14 pagesSanskritiASEEM DUANo ratings yet
- HP TruCluster Server V5.1ADocument21 pagesHP TruCluster Server V5.1AAlexandru BotnariNo ratings yet
- Wind Load AnalysisDocument4 pagesWind Load AnalysisNiraj ShindeNo ratings yet
- CamScanner Scanned DocumentDocument1,284 pagesCamScanner Scanned DocumentGeorgeanne 25100% (1)
- Company Profile of DAEJU CONTROL CO., LTD.Document17 pagesCompany Profile of DAEJU CONTROL CO., LTD.Ki Ho ChungNo ratings yet
- Design and Detailing of RCC BeamsDocument4 pagesDesign and Detailing of RCC BeamsPhilip JohnNo ratings yet
- C11 Valves and InjDocument7 pagesC11 Valves and Injraymon1191No ratings yet
- Instrument TubingDocument11 pagesInstrument Tubingbab_ooNo ratings yet
- Private Key Addresses and Compressed AddressesDocument5 pagesPrivate Key Addresses and Compressed AddressesJeffrey Barnes100% (1)
- Danfoss Saginomiya FQS - 1Document2 pagesDanfoss Saginomiya FQS - 1istorletNo ratings yet
- Parabolic Leaf Spring OptimizationDocument8 pagesParabolic Leaf Spring OptimizationRajaSekarsajjaNo ratings yet
- AI Guide - What is Artificial Intelligence and How Does it WorkDocument10 pagesAI Guide - What is Artificial Intelligence and How Does it WorkZeus Kabadayı FanNo ratings yet
- User Manual Eg1150hDocument38 pagesUser Manual Eg1150hprulufreNo ratings yet
- Panduit Electrical CatalogDocument1,040 pagesPanduit Electrical CatalognumnummoNo ratings yet
- HIS 770B Series-User ManualDocument33 pagesHIS 770B Series-User ManualVishwas MaritronicsNo ratings yet