International Journal of Computer Networks & Communications (IJCNC) Vol.7, No.
4, July 2015
A GENETIC ALGORITHM TO SOLVE THE
MINIMUM-COST PATHS TREE PROBLEM
Ahmed Y. Hamed1 and M. R. Hassan2
1
College of Applied Studies and Community Services, University of Dammam,
KSA.
2
Computer Science Branch, Mathematics Department, Faculty of Science, Aswan
University, Egypt.
ABSTRACT
One of the important steps in routing is to find a feasible path based on the state information. In order to
support real-time multimedia applications, the feasible path that satisfies one or more constraints has to be
computed within a very short time. Therefore, the paper presents a genetic algorithm to solve the paths tree
problem subject to cost constraints. The objective of the algorithm is to find the set of edges connecting all
nodes such that the sum of the edge costs from the source (root) to each node is minimized. I.e. the path
from the root to each node must be a minimum cost path connecting them. The algorithm has been applied
on two sample networks, the first network with eight nodes, and the last one with eleven nodes to illustrate
its efficiency.
KEYWORDS
Computer networks; Minimum-cost paths tree; Genetic algorithms.
1. INTRODUCTION
The shortest paths tree rooted at vertex s is a spanning tree T of G, such that the path distance
from root v to any other vertex u in T is the shortest path distance from v to u in G,[1]. In the case
of single link failure, [2], proposed an algorithm to solve the optimal shortest paths tree. When
considering multicast tree, [3], the authors presented an algorithm to find the Shortest Best Path
Tree (SBPT). Based on labeling techniques, Ziliaskopoulos et al. in [4], proposed an algorithm to
solve the shortest path trees. Also, The shortest paths tree problem has been solved by an efficient
modified continued pulse coupled neural network (MCPCNN) model, [5].
Heuristic and approximate algorithms for multi-constrained routing (MCR) are not effective in
dynamic network environment for real-time applications when the state information of the
network is out of date, [6]. The authors in [6] presented a genetic algorithm to solve the MCR
problem subject to transmission delay and transmission success ratio. Younes in [7] proposed a
genetic algorithm to determine the k shortest paths with bandwidth constraints from a single
source node to multiple destinations nodes. Liu et al. in [8] presented an oriented spanning tree
(OST) based genetic algorithm (GA) for solving both the multi-criteria shortest path problem
(MSPP) and the multi-criteria constrained shortest path problems (MCSPP). Also, in [9] the
genetic algorithm is used to find the low-cost multicasting tree with bandwidth and delay
constraints.
The paper presents a genetic algorithm to solve the paths tree problem under cost constraint. The
algorithm reads the connection matrix and the cost matrix of a given network. Also, given the
source (root) node s, then the genetic operations are executed to search the minimum cost paths
that construct the minimum cost paths tree rooted at the source node s.
DOI : 10.5121/ijcnc.2015.7405
75
International Journal of Computer Networks & Communications (IJCNC) Vol.7, No.4, July 2015
The rest of the paper is organized as follows: Section 2 presents notations. The problem
description in section 3. The proposed GA and its components are given in section 4. Section 5
provides the pseudo code of the entire GA. Section 6 shows the illustrative examples. Finally,
section 7 presents conclusions.
2. Notations
G
A network graph.
The number of nodes in G.
The number of edges in G.
eij
An edge between node i and node j in G.
ce
The cost of an edge e.
The connection matrix of the given network.
CM
The cost matrix of the given network.
np
The number of paths from node s to t
Ts
The shortest path rooted at node s
3. THE PROBLEM DESCRIPTION
Given a specified vertex s. Let Pi(s, t) be a path number i from s to t. Let Ci(P(s, t)) be the cost of the
path Pi(s, t), i = 1,2, , np. The path Pk(s, t) has a minimum cost among all the (s, t)-paths if:
Where
Therefore, the minimum-cost paths tree Ts is the collection of minimum cost paths from the
source (root) node s to the destination nodes ti. I.e.
The presented method in this paper depend on reading both the connection and cost matrices of a
given network, and then find the minimum-cost paths tree rooted at the source node.
Consider the following network with five nodes, shown in Figure 1.
76
International Journal of Computer Networks & Communications (IJCNC) Vol.7, No.4, July 2015
Figure 1. Five nodes network.
The connection matrix (a square matrix of dimension N x N that represents a connection between
each node-pairs) of the Figure 1 network is:
Figure 2. The connection matrix of network in Figure 1
The cost matrix CM for the network shown in Figure 1 is in the following form:
Figure 3. The cost matrix network in Figure 1.
In Figure 4, we show that the minimum-cost paths tree rooted at node 1 with the minimum cost
equals to 23.
Figure 4. Minimum-cost paths tree rooted at node 1
77
International Journal of Computer Networks & Communications (IJCNC) Vol.7, No.4, July 2015
4. THE PROPOSED GENETIC ALGORITHM (GA)
In the proposed GA, each candidate path is represented by a binary string with length N that can
be used as a chromosome. Each element of the chromosome represents a node in the network
topology. So, for a network of N nodes, there are N string components in each candidate solution
x. Each chromosome must contain at least two none zero elements.
For example if N = 8, the path of Figure 5 is represented as a chromosome as shown in Figure 6.
Figure
Figure 5. A candidate Path.
Figure 6. The chromosome corresponding to the path given in Figure 2.
In the following subsections we give an explanation of different components (operations) of the
presented genetic algorithm.
4.1. Initial Population
The generated chromosome in initial population must contain at least two none zero elements to
be a real candidate path. The following steps show how to generate pop_size chromosomes of the
initial population:
1. Randomly generate a chromosome x.
2. Check if x represents a real candidate path, i.e. contains at least two non zero elements.
3. Repeat steps 1 to 2 to generate pop_size chromosomes.
4.2. The objective function
The cost of the candidate path is used as objective function to compare the solutions and find the
best one. The cost of the candidate path is calculated when it satisfies the following conditions:
The chromosome must contain at least two none zero elements.
The chromosome contains a connected candidate path. I.e. each node in the path connects
at least one another.
78
International Journal of Computer Networks & Communications (IJCNC) Vol.7, No.4, July 2015
4.3. Genetic Crossover Operation
In the proposed GA, we use the single cut point crossover to breed a new offspring from two
parents. The crossover operation will be performed if the crossover ratio (Pc=0.90) is verified.
The cut point is randomly selected. Figure 7 shows the crossover operation.
Parent
Cut point
1
1
1
Child
Parent
Figure 7. Example of the crossover operation.
4.4. Genetic Mutation Operation
The mutation operation is performed on bit-by-bit basis. In the proposed approach, the mutation
operation will be performed if the mutation ratio (Pm) is verified. The Pm in this approach is
chosen experimentally to be 0.02. The point to be mutated is selected randomly. The offspring
generated by mutation is shown in Figure 8.
Figure 8. An example of the mutation operation.
5. THE ENTIRE ALGORITHM
The following pseudocode illustrates the use of our different components of the GA algorithm to
generate the minimum-cost paths tree of a given network.
Algorithm Find minimum-cost paths tree
Input : Set the parameters: pop_size, max_gen, Pm, Pc.
Output : Minimum-cost paths tree
1. Set j = 2, the destination node.
2. Generate the initial population according to the steps in Section 0.
3. gen1.
4. While (gen < = max_gen) do {
5.
P1
6.
While (P <= pop_size) do {
7.
Apply Genetic operations to obtain new population
7.1. Apply crossover according to Pc parameter (Pc >=0.90) as described in section 4.3.
7.2. Apply Mutation as shown in section 4.4.
7.3. Compute the total cost of the candidate path according to Section 3.
8.
P P+1.
9. }
10. Set gen =gen + 1
79
International Journal of Computer Networks & Communications (IJCNC) Vol.7, No.4, July 2015
11. if gen > max_gen then stop
12. }
13. Save the candidate path for the destination j that has the minimum cost (the shortest path
between the root node and the destination node j).
14. Set j = j + 1
15. If j <= N Goto Step 2, otherwise stop the entire algorithm and print out the minimum-cost
paths tree.
5. EXPERIMENTAL RESULTS
The proposed algorithm is implemented using Borland C++ Ver. 5.5 and the initial values of the
parameters are: population size (pop-size=20), maximum generation (max_gen=50), Pc=0.90,
and Pm=0.02. The technique reads both the connection and cost matrices of the given network.
Then it generates the shortest paths tree of the network that posses the minimum cost. Two
Examples are used to test and validate the proposed technique.
5.1 Eight nodes example
In this section, we illustrate the results of applying the presented GA on an eight nodes
network example, as shown in Figure 9. The final output o the GA is shown in Table 1.
Figure 10 shows the shortest paths tree rooted at node 1.
Figure 9. Eight nodes network.
Table 1: The final output of the GA.
The chromosome
(1 1 0 0 0 0 0 0)
(1 0 1 0 0 0 0 0)
(1 0 1 1 0 0 0 0)
(1 0 0 0 1 0 0 0)
(1 0 0 0 0 1 0 0)
(1 0 0 0 0 1 1 0)
(1 0 1 1 0 0 0 1)
The shortest paths set
{1, 2}
{1, 3}
{1, 3, 4}
{1, 5}
{1, 6}
{1, 6, 7}
{1, 3, 4, 8}
The cost
6
5
9
4
6
10
13
80
International Journal of Computer Networks & Communications (IJCNC) Vol.7, No.4, July 2015
Figure 10: The shortest paths tree
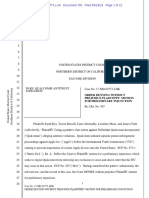
6.2. Eleven nodes example
In this section, the GA is applied on eleven nodes example as shown in Figure 11. The final
output of the GA is shown in Table 2. Figure 12 shows the minimum-cost paths tree rooted at
node 1.
Figure 11: Eleven nodes network.
81
International Journal of Computer Networks & Communications (IJCNC) Vol.7, No.4, July 2015
Table 2. The final output of the GA.
The chromosome
(1 1 0 0 0 0 0 0 0 0 0)
(1 0 1 0 0 0 0 0 0 0 1)
(1 0 1 1 0 0 0 0 0 0 1)
(1 1 0 0 1 0 0 0 0 0 0)
(1 0 0 0 0 1 1 0 0 0 0)
(1 0 0 0 0 1 0 0 0 0 0)
(1 0 0 0 0 0 0 1 1 0 0)
(1 0 0 0 0 0 0 0 1 0 0)
(1 0 0 0 0 0 0 0 0 1 1)
(1 0 0 0 0 0 0 0 0 0 1)
The shortest paths set
The cost
{1, 2}
{1, 11, 3}
{1, 11, 3, 4}
{1, 2, 5}
{1, 7, 6}
{1, 7}
{1, 9, 8}
{1, 9}
{1, 11, 10}
{1, 11}
8
8
17
10
17
9
9
6
11
3
Figure 12: The minimum-cost paths tree rooted at node 1.
6.3. Sixteen nodes example
Also, the GA is applied on sixteen nodes example as shown in Figure 13. The final output of the
GA is shown in Table 3. Figure 14 shows the minimum-cost paths tree rooted at node 1.
82
International Journal of Computer Networks & Communications (IJCNC) Vol.7, No.4, July 2015
Figure 13: Sixteen nodes network
Table 3. The final output of the GA.
The chromosome
The shortest paths set
(1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0)
(1 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0)
(1 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0)
(1 1 0 0 1 0 0 0 0 0 0 0 0 0 0 0)
(1 0 1 0 0 0 1 1 0 0 0 0 0 0 0 0)
(1 0 1 0 0 0 1 0 0 0 0 0 0 0 0 0)
(1 0 1 0 0 0 1 1 0 0 0 0 0 0 0 0)
(1 0 1 0 0 0 1 0 1 1 0 0 0 0 0 0 )
(1 1 1 0 1 0 0 0 0 1 0 0 0 0 0 0 )
(1 0 0 1 0 0 1 1 0 0 1 0 0 0 0 0 )
(1 0 1 0 0 0 1 0 0 0 1 1 0 0 0 0)
(1 0 1 0 0 0 1 0 0 0 1 1 1 0 0 )
(1 0 1 0 0 0 0 0 0 0 1 1 0 1 1 0 )
(1 0 1 0 0 0 1 0 0 0 1 0 0 1 1 0 )
(1 0 1 0 0 0 1 0 0 0 1 0 0 1 0 1 )
{1, 3, 2}
{1, 3}
{1, 4}
{1, 3, 2, 5}
(1, 3, 7, 6}
(1, 3, 7}
(1, 3,7, 8}
(1, 3, 7, 10, 9}
(1, 3, 7, 10}
(1, 3, 7, 11}
(1, 3, 7, 11, 12}
(1, 3, 7, 11, 14, 13}
(1, 3, 11, 12, 15, 14}
(1, 3, 7, 11, 14, 15}
(1, 3, 7, 11, 14, 16}
The
cost
11
3
7
14
21
13
30
28
22
15
18
26
31
24
28
83
International Journal of Computer Networks & Communications (IJCNC) Vol.7, No.4, July 2015
Figure 14: The minimum-cost paths tree rooted at node 1.
7. CONCLUSIONS
The paper addressed the minimum-cost paths tree problem and presented an efficient GA to solve
this problem. The algorithm reads both the connection and cost matrices of a given network, then
search the minimum-cost paths that construct the minimum-cost paths tree rooted at a given node
s. The GA has been applied on two examples, the results proved that the efficiency of the
proposed GA. For the future work, the GA can be extended to solve multi-constrained paths tree
problem.
References
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8
[9]
Pierre Hansen and Maolin Zheng, Shortest shortest path trees of a network, Discrete Applied
Mathematics, Vol. 65, Issues 13, March 1996, pp.275284.
Yueping Li, Zhe Nie and Xiaohong Zhou, Finding the Optimal Shortest Path Tree with Respect to
Single Link Failure Recovery, Fourth International Conference on Networked Computing and
Advanced Information Management, 2008, NCM '08, Vol. 1, pp. 412 415.
Hiroshi Fujinoki and Kenneth J. Christensen, The New Shortest Best Path Tree (SBPT) Algorithm
for Dynamic Multicast Trees, Conference onLocal Computer Networks, 1999. LCN '99. pp. 201211.
Athanasios K. Ziliaskopoulos, Fotios D. Mandanas, and Hani S. Mahmassani,An extension of
labeling techniques for finding shortest path trees, European Journal of Operational Research, Vol.
198 (2009), pp. 6372.
Hong Qua, Simon X. Yang, Zhang Yi, and Xiaobin Wanga, A novel neural network method for
shortest path tree computation, Applied Soft Computing, Vol. 12 (2012), pp. 32463259.
Ting Lu and Jie Zhu, A genetic algorithm for finding a path subject to two constraints, Applied Soft
Computing, Vol. 13, Issue 2, February 2013, pp. 891-898.
A. Younes , A genetic algorithm for finding the k shortest paths in a network, Egyptian Informatics
Journal, Vol. 11, Issue 2, December 2010, pp. 75-79.
Linzhong Liu, Haibo Mu, Xinfeng Yang, Ruichun He, and Yinzhen LiAn, oriented spanning tree
based genetic algorithm for multi-criteria shortest path problems, Applied Soft Computing, Vol. 12,
Issue 1, January 2012, pp. 506-515.
A. Younes, Multicast routing with bandwidth and delay constraints based on genetic algorithms,
Egyptian Informatics Journal, Vol. 12, Issue 2, July 2011, pp. 107-114.
84
International Journal of Computer Networks & Communications (IJCNC) Vol.7, No.4, July 2015
AUTHORS
Ahmed Younes Hamed received his PhD degree in Sept. 1996 from South Valley
University, Egypt. His research interests include Artificial Intelligence and genetic
algorithms; specifically in the area of computer networks. Recently, he has started conducting
a research in the area of Image Processing. Currently, he works as an Associate Professor in
University of Dammam, KSA. Younes always publishes the outcome of his research in
international journals and conferences.
Moatamad Hassan holds a PhD of Computer Science in June 2006 from Aswan University,
Faculty of Science, Aswan, Egypt. He is currently an assistant professor at the Department of
Mathematics, Computer Science Branch, Faculty of Science, Aswan University, Aswan,
Egypt. His work deals with QoS, Reliability, and Computer Network Design problems.
85
You might also like
- Machine Learning Based Ensemble Classifier For Android Malware DetectionDocument18 pagesMachine Learning Based Ensemble Classifier For Android Malware DetectionAIRCC - IJCNCNo ratings yet
- International Journal of Computer Networks & Communications (IJCNC)Document1 pageInternational Journal of Computer Networks & Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- PUMMP: Phishing URL Detection Using Machine Learning With Monomorphic and Polymorphic Treatment of FeaturesDocument20 pagesPUMMP: Phishing URL Detection Using Machine Learning With Monomorphic and Polymorphic Treatment of FeaturesAIRCC - IJCNCNo ratings yet
- Iot-Based Mobile Adaptive Routing Algorithm in A Ubiquitous NetworkDocument16 pagesIot-Based Mobile Adaptive Routing Algorithm in A Ubiquitous NetworkAIRCC - IJCNCNo ratings yet
- Efficient Ecc-Based Authentication Scheme For Fog-Based Iot EnvironmentDocument17 pagesEfficient Ecc-Based Authentication Scheme For Fog-Based Iot EnvironmentAIRCC - IJCNCNo ratings yet
- International Journal of Computer Networks Communications (IJCNC)Document1 pageInternational Journal of Computer Networks Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- Enhancing HTTP Web Protocol Performance With Updated Transport Layer TechniquesDocument17 pagesEnhancing HTTP Web Protocol Performance With Updated Transport Layer TechniquesAIRCC - IJCNCNo ratings yet
- Intrusion Detection System (IDS) Development Using Tree-Based Machine Learning AlgorithmsDocument17 pagesIntrusion Detection System (IDS) Development Using Tree-Based Machine Learning AlgorithmsAIRCC - IJCNCNo ratings yet
- Investigation of Ant Colony Optimization Algorithm For Efficient Energy Utilization in Wireless Sensor NetworkDocument20 pagesInvestigation of Ant Colony Optimization Algorithm For Efficient Energy Utilization in Wireless Sensor NetworkAIRCC - IJCNCNo ratings yet
- International Journal of Computer Networks & Communications (IJCNC)Document2 pagesInternational Journal of Computer Networks & Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- Ddos Attacks Detection Using Dynamic Entropy Insoftware-Defined Network Practical EnvironmentDocument16 pagesDdos Attacks Detection Using Dynamic Entropy Insoftware-Defined Network Practical EnvironmentAIRCC - IJCNC100% (1)
- Congestion and Energy Aware Multipath Load Balancing Routing For LLNSDocument22 pagesCongestion and Energy Aware Multipath Load Balancing Routing For LLNSAIRCC - IJCNCNo ratings yet
- International Journal of Computer Networks Communications (IJCNC)Document1 pageInternational Journal of Computer Networks Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- Evaluating Latency in Fifth-Generation Vehicle-To-Everything Communications Using Adaptive Neuro-Fuzzy Inference System ModelDocument20 pagesEvaluating Latency in Fifth-Generation Vehicle-To-Everything Communications Using Adaptive Neuro-Fuzzy Inference System ModelAIRCC - IJCNCNo ratings yet
- Secure Routing Protocol To Mitigate Attacks by Using Blockchain Technology in ManetDocument20 pagesSecure Routing Protocol To Mitigate Attacks by Using Blockchain Technology in ManetAIRCC - IJCNCNo ratings yet
- International Journal of Computer Networks Communications (IJCNC)Document1 pageInternational Journal of Computer Networks Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- International Journal of Computer Networks Communications (IJCNC)Document1 pageInternational Journal of Computer Networks Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- International Journal of Computer Networks Communications (IJCNC)Document1 pageInternational Journal of Computer Networks Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- Detection of Peer-to-Peer Botnets Using Graph MiningDocument21 pagesDetection of Peer-to-Peer Botnets Using Graph MiningAIRCC - IJCNCNo ratings yet
- International Journal of Computer Networks Communications (IJCNC)Document1 pageInternational Journal of Computer Networks Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- International Journal of Computer Networks Communications (IJCNC)Document1 pageInternational Journal of Computer Networks Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- Security Culture, Top Management, and Training On Security Effectiveness: A Correlational Study Without Cissp ParticipantsDocument24 pagesSecurity Culture, Top Management, and Training On Security Effectiveness: A Correlational Study Without Cissp ParticipantsAIRCC - IJCNCNo ratings yet
- Performance Evaluation of The KVM Hypervisor Running On Arm-Based Single-Board ComputersDocument18 pagesPerformance Evaluation of The KVM Hypervisor Running On Arm-Based Single-Board ComputersAIRCC - IJCNCNo ratings yet
- International Journal of Computer Networks Communications (IJCNC)Document1 pageInternational Journal of Computer Networks Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- VHFRP: Virtual Hexagonal Frame Routing Protocol For Wireless Sensor NetworkDocument17 pagesVHFRP: Virtual Hexagonal Frame Routing Protocol For Wireless Sensor NetworkAIRCC - IJCNCNo ratings yet
- An Efficient Mobile Gateway Selection and Discovery Based-Routing Protocol in Heterogeneous Lte-Vanet NetworksDocument23 pagesAn Efficient Mobile Gateway Selection and Discovery Based-Routing Protocol in Heterogeneous Lte-Vanet NetworksAIRCC - IJCNCNo ratings yet
- An Efficient Mobile Gateway Selection and Discovery Based-Routing Protocol in Heterogeneous Lte-Vanet NetworksDocument23 pagesAn Efficient Mobile Gateway Selection and Discovery Based-Routing Protocol in Heterogeneous Lte-Vanet NetworksAIRCC - IJCNCNo ratings yet
- International Journal of Computer Networks Communications (IJCNC)Document1 pageInternational Journal of Computer Networks Communications (IJCNC)AIRCC - IJCNCNo ratings yet
- Secure Routing Protocol To Mitigate Attacks by Using Blockchain Technology in ManetDocument20 pagesSecure Routing Protocol To Mitigate Attacks by Using Blockchain Technology in ManetAIRCC - IJCNCNo ratings yet
- Security Culture, Top Management, and Training On Security Effectiveness: A Correlational Study Without Cissp ParticipantsDocument24 pagesSecurity Culture, Top Management, and Training On Security Effectiveness: A Correlational Study Without Cissp ParticipantsAIRCC - IJCNCNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Acc400 Chapter 8 Quiz Note FileDocument6 pagesAcc400 Chapter 8 Quiz Note Filemad_hatter_No ratings yet
- Shekhar - Business Ecosystem Analysis For Strategic Decision MakingDocument82 pagesShekhar - Business Ecosystem Analysis For Strategic Decision MakingTuladhar LindaNo ratings yet
- Computer Processing of Human LanguageDocument2 pagesComputer Processing of Human LanguageKym Algarme50% (2)
- Allprog II EnglishDocument12 pagesAllprog II Englishmohcin_111_124No ratings yet
- Bhaardwaj New ResumeDocument3 pagesBhaardwaj New Resumek deviNo ratings yet
- Infosys Technologies Limited: Automotive IndustryDocument19 pagesInfosys Technologies Limited: Automotive IndustrySharath ReddyNo ratings yet
- Tortoise HGDocument93 pagesTortoise HGKhanoyants M. ArmenNo ratings yet
- Origin C Programming GuideDocument287 pagesOrigin C Programming GuideRaviranjan Kumar SinghNo ratings yet
- The ZFS File System: A New Architecture for Strong Data Integrity, Simple Administration and Immense CapacityDocument13 pagesThe ZFS File System: A New Architecture for Strong Data Integrity, Simple Administration and Immense CapacityRijy LoranceNo ratings yet
- GuiXT InputScriptDocument8 pagesGuiXT InputScriptKumud RanjanNo ratings yet
- 18 08 29Document22 pages18 08 29Florian MuellerNo ratings yet
- Worksheet BFH - SolutionDocument7 pagesWorksheet BFH - SolutionAmogh D GNo ratings yet
- Flip-Flops, Registers, Counters, and A Simple ProcessorDocument33 pagesFlip-Flops, Registers, Counters, and A Simple ProcessorsupriantoNo ratings yet
- E Gazette User Manual PDF 07052018Document26 pagesE Gazette User Manual PDF 07052018Gitesh SalunkeNo ratings yet
- Assignment 4 - ArraysDocument3 pagesAssignment 4 - ArraysSarthak SNo ratings yet
- Antonius Steven Dimas Prasetya Sinaga - Tugas11Document4 pagesAntonius Steven Dimas Prasetya Sinaga - Tugas11Steven SinagaNo ratings yet
- Access the new Azure Portal and view subscription information in the dashboardDocument2 pagesAccess the new Azure Portal and view subscription information in the dashboardSaikrishNo ratings yet
- DsfssafaDocument4 pagesDsfssafaGasNo ratings yet
- ChatScript Basic User ManualDocument28 pagesChatScript Basic User ManualSharanya KMNo ratings yet
- Datapath OverviewDocument7 pagesDatapath OverviewJonathan TinnerNo ratings yet
- C++ Nested Loops LabDocument8 pagesC++ Nested Loops LabFikriZainNo ratings yet
- Programming Logic and Design Comprehensive 7th Edition Joyce Farrell Solutions ManualDocument36 pagesProgramming Logic and Design Comprehensive 7th Edition Joyce Farrell Solutions Manualhangingboune82um100% (9)
- GHG Protocol Guidance for Assessing Emissions from ICT Products and ServicesDocument6 pagesGHG Protocol Guidance for Assessing Emissions from ICT Products and ServicesNikhil AnandNo ratings yet
- Mujtaba HabibDocument2 pagesMujtaba HabibMujtaba HabibNo ratings yet
- 3VA91570EK11 Datasheet en PDFDocument4 pages3VA91570EK11 Datasheet en PDFAmanda RezendeNo ratings yet
- Iso-Pas 17004 2005 PDFDocument11 pagesIso-Pas 17004 2005 PDFCarlos Felipe Orjuela RamírezNo ratings yet
- Cost Management: PMP Study Guide (PMBOK 6th Edition)Document7 pagesCost Management: PMP Study Guide (PMBOK 6th Edition)abhasNo ratings yet
- GSLC 2 - Group 1-Hal 541 - Rabu, 05 Desember 2018Document3 pagesGSLC 2 - Group 1-Hal 541 - Rabu, 05 Desember 2018twenty4seven100% (2)
- 01 Linux BasicsDocument19 pages01 Linux Basicssampurnakumar100% (1)
- Automotive Fuel Tank Sloshing AnalysisDocument34 pagesAutomotive Fuel Tank Sloshing AnalysisEdwin SpencerNo ratings yet