You might also like
- L10 - Finite State RecognizersDocument33 pagesL10 - Finite State Recognizersnho_OsakaNo ratings yet
- L7 - Flip-Flops and Sequential Circuit DesignDocument41 pagesL7 - Flip-Flops and Sequential Circuit DesignSuresh ThallapelliNo ratings yet
- sc554 2014 Lecture09Document34 pagessc554 2014 Lecture09tharindu12No ratings yet
- L6 - Latches, The D Flip-Flop and Counter DesignDocument50 pagesL6 - Latches, The D Flip-Flop and Counter DesignultragaffNo ratings yet
- Capstone ResearchProject Moore Mealy MachineDocument9 pagesCapstone ResearchProject Moore Mealy MachineAnish ChatterjeeNo ratings yet
- Clocked Sequential CircuitDocument33 pagesClocked Sequential CircuitMarco Antonio BussanichNo ratings yet
- Finite State Machines: Moore MachineDocument4 pagesFinite State Machines: Moore Machineborakas_borakasNo ratings yet
- Isoparametric Elements and Solution TechniquesDocument41 pagesIsoparametric Elements and Solution Techniquessir867413140No ratings yet
- Finite State Machine Design: Prith Banerjee Ece C03 Advanced Digital Design Spring 1998Document47 pagesFinite State Machine Design: Prith Banerjee Ece C03 Advanced Digital Design Spring 1998VIKRAMNo ratings yet
- Comb CirDocument50 pagesComb Cirimcoolsha999No ratings yet
- Digital Design Assignment 40%Document2 pagesDigital Design Assignment 40%Obada Ar-ruzziNo ratings yet
- 10 SequentialCircuitDesignDocument51 pages10 SequentialCircuitDesignTony Kawai KanNo ratings yet
- Control Logic DesignDocument40 pagesControl Logic Designrameshaarya9980% (5)
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument30 pagesEmbedded Systems Design: A Unified Hardware/Software IntroductionNaresh Ks100% (1)
- Hardware Slides 08Document30 pagesHardware Slides 08Taqi ShahNo ratings yet
- Sequential Circuits II DocumentDocument21 pagesSequential Circuits II DocumentBlueNo ratings yet
- Viterbi Decoder: Presentation #2: Omar Ahmad Prateek Goenka Saim Qidwai Lingyan SunDocument13 pagesViterbi Decoder: Presentation #2: Omar Ahmad Prateek Goenka Saim Qidwai Lingyan SunSteven LeNo ratings yet
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument29 pagesEmbedded Systems Design: A Unified Hardware/Software IntroductionM Rameez Ur RehmanNo ratings yet
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument29 pagesEmbedded Systems Design: A Unified Hardware/Software IntroductionMurali KrishnaNo ratings yet
- The Design Process & ALU DesignDocument6 pagesThe Design Process & ALU DesignNarender KumarNo ratings yet
- Analysis BoostDocument6 pagesAnalysis BoostmelziambarNo ratings yet
- Designing A Data Synchronizer Logic CircuitDocument6 pagesDesigning A Data Synchronizer Logic CircuitbabahussainNo ratings yet
- Sequential Logic Implementation: Models For Representing Sequential CircuitsDocument18 pagesSequential Logic Implementation: Models For Representing Sequential CircuitsBrightNo ratings yet
- 19 MooreMealyDocument23 pages19 MooreMealyAkinwale Walexkino AwoyeleNo ratings yet
- Combinational Logic Design ProcessDocument21 pagesCombinational Logic Design ProcessILikeScribd5050No ratings yet
- Designing A Coffee Vending Machine ProjectDocument5 pagesDesigning A Coffee Vending Machine ProjectWildan Fauzan Wfz100% (1)
- M.D. BookDocument20 pagesM.D. Bookjaved alamNo ratings yet
- Topic 7. Combinational Logic Circuit: Ce232 Digital SystemDocument44 pagesTopic 7. Combinational Logic Circuit: Ce232 Digital SystemNep NepNo ratings yet
- L7 - Flip-Flops and Sequential Circuit Design (PDF Search Engine)Document21 pagesL7 - Flip-Flops and Sequential Circuit Design (PDF Search Engine)arfat_ahmad_khanNo ratings yet
- CO Unit - IIDocument45 pagesCO Unit - IISubathra Devi MourouganeNo ratings yet
- Chapter 2 Boolean Algebra Logic GatesDocument29 pagesChapter 2 Boolean Algebra Logic GatesZahra JafarNo ratings yet
- Chapter #8: Finite State Machine DesignDocument57 pagesChapter #8: Finite State Machine DesignAli AhmadNo ratings yet
- Modeling and Simulation of PFC ConvertersDocument93 pagesModeling and Simulation of PFC ConvertersSanjeev Singh100% (1)
- Digital Oscilloscope With FPGADocument36 pagesDigital Oscilloscope With FPGAAhmed YasserNo ratings yet
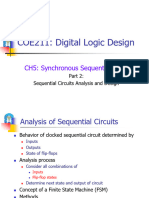
- COE211 CH5 Part2Document24 pagesCOE211 CH5 Part2hm100hm100hm100No ratings yet
- Lec17 FSM PDFDocument27 pagesLec17 FSM PDFNithin KumarNo ratings yet
- ETU 07322 Lecture 3 - Combinational Logic CircuitDocument43 pagesETU 07322 Lecture 3 - Combinational Logic CircuitFrancis LubangoNo ratings yet
- Multi Clock DesignDocument37 pagesMulti Clock DesignRoc Kim Sí ĐiểuNo ratings yet
- Basic Sequential Design Steps: Flip-Flop Inputs Primary OutputsDocument10 pagesBasic Sequential Design Steps: Flip-Flop Inputs Primary OutputsAnkur SinghNo ratings yet
- AO Module Electronics: Mark HuntenDocument24 pagesAO Module Electronics: Mark Huntensecretxd26No ratings yet
- Buck Boost ConverterDocument17 pagesBuck Boost Converteramohdzah100% (2)
- AC500 CPU: Task Configuration Basic ModuleDocument29 pagesAC500 CPU: Task Configuration Basic ModuleAnonymous 9WNqHZNo ratings yet
- CEN214 Chapter5 P3 Modified PDFDocument60 pagesCEN214 Chapter5 P3 Modified PDFAboNawaFNo ratings yet
- Analysis and Design of Sequential Logic CircuitsDocument115 pagesAnalysis and Design of Sequential Logic CircuitsQuoc Khanh PhamNo ratings yet
- Combinational Devices and ASM ChartsDocument10 pagesCombinational Devices and ASM ChartsSunny KumarNo ratings yet
- Stopwatch Using Logic GatesDocument7 pagesStopwatch Using Logic Gatesakarairi83% (6)
- Fundamentals of Digital IC Design: Haibo Wang ECE Department Southern Illinois University Carbondale, IL 62901Document29 pagesFundamentals of Digital IC Design: Haibo Wang ECE Department Southern Illinois University Carbondale, IL 62901Huzur AhmedNo ratings yet
- ECE 331 - Digital System Design: Derivation of State Graphs and State TablesDocument39 pagesECE 331 - Digital System Design: Derivation of State Graphs and State TablesRizulNo ratings yet
- 4 - Bit - Carry - Propagate - Adder PDFDocument32 pages4 - Bit - Carry - Propagate - Adder PDFAhmed GadNo ratings yet
- Finite State Machines: ECE 449 - Computer Design LabDocument49 pagesFinite State Machines: ECE 449 - Computer Design LabAvinash KumarNo ratings yet
- 8.RCX - View of CMOS Inverter and Nand GateDocument6 pages8.RCX - View of CMOS Inverter and Nand GatealokjadhavNo ratings yet
- Least Cost System Operation: Economic Dispatch 2: Smith College, EGR 325 March 10, 2006Document37 pagesLeast Cost System Operation: Economic Dispatch 2: Smith College, EGR 325 March 10, 2006engidawabelNo ratings yet
- Sequential Circuit Design: Slides ForDocument23 pagesSequential Circuit Design: Slides ForRamarao ChNo ratings yet
- CPS 104 Computer Organization and Programming Lecture-19: Busses, Registers, Building A DatapathDocument29 pagesCPS 104 Computer Organization and Programming Lecture-19: Busses, Registers, Building A DatapathprachesNo ratings yet
- MOD 21 CountersDocument10 pagesMOD 21 CountersrodzdNo ratings yet
- 4 - Bit - Carry - Propagate - Adder PDFDocument32 pages4 - Bit - Carry - Propagate - Adder PDFRennze Dominic DeveraNo ratings yet
- Combinational Logic Implementation Technologies: Hai Zhou ECE 303 Advanced Digital Design Spring 2002Document40 pagesCombinational Logic Implementation Technologies: Hai Zhou ECE 303 Advanced Digital Design Spring 2002Aravind Ramesh100% (1)
- Advanced Techniques and Technology of Computer-Aided Feedback ControlFrom EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Biotech Session HallDocument1 pageBiotech Session HallGamaliel Narvios AguilarNo ratings yet
- SSG Acquaintance Party Proposal 1Document6 pagesSSG Acquaintance Party Proposal 1Gamaliel Narvios AguilarNo ratings yet
- SQL Syntax PDFDocument3 pagesSQL Syntax PDFGamaliel Narvios Aguilar100% (1)
- Midterm Mock Examination PDFDocument3 pagesMidterm Mock Examination PDFGamaliel Narvios AguilarNo ratings yet
- OutFlows & InFlowsDocument16 pagesOutFlows & InFlowsGamaliel Narvios Aguilar100% (1)
- Final ProjectDocument12 pagesFinal ProjectGamaliel Narvios AguilarNo ratings yet
- Communication Arts (Soft Copy)Document39 pagesCommunication Arts (Soft Copy)Gamaliel Narvios AguilarNo ratings yet
- Law of Supply & DemandDocument27 pagesLaw of Supply & DemandGamaliel Narvios AguilarNo ratings yet
- L9 - Mealy and Moore MachinesDocument28 pagesL9 - Mealy and Moore MachinesGamaliel Narvios AguilarNo ratings yet
- ResumeDocument3 pagesResumeGamaliel Narvios AguilarNo ratings yet
- Community Health NursingDocument38 pagesCommunity Health NursingGamaliel Narvios AguilarNo ratings yet
- Analog Circuits in 28 NM and 14 NM Finfet: Lukas Dörrer, Franz Kuttner, Francesco Conzatti, and Patrick TortaDocument15 pagesAnalog Circuits in 28 NM and 14 NM Finfet: Lukas Dörrer, Franz Kuttner, Francesco Conzatti, and Patrick TortaRodrigo SantosNo ratings yet
- Decimator Prorack G Stereo MOD Manual2Document9 pagesDecimator Prorack G Stereo MOD Manual2Stefanos_D100% (1)
- Generators Winding PitchDocument1 pageGenerators Winding Pitchsbhatta73No ratings yet
- Ada 6.1 & Ampx4: Ada 6.1 Surround Processor & 4 Channel Power Amplifier Operations & Installation ManualDocument19 pagesAda 6.1 & Ampx4: Ada 6.1 Surround Processor & 4 Channel Power Amplifier Operations & Installation ManualCesar Eddy Diaz HernandezNo ratings yet
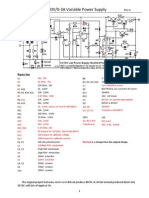
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Document2 pagesModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraNo ratings yet
- Hart ConnectionsDocument9 pagesHart ConnectionsiyyaniNo ratings yet
- How To Extend LTE Coverage With Limited RRU Capacity-Read OnlyDocument14 pagesHow To Extend LTE Coverage With Limited RRU Capacity-Read OnlyArtty Numatti67% (3)
- ET-426L Lab Manual Spring 2020 PDFDocument59 pagesET-426L Lab Manual Spring 2020 PDFMalik Mudasir NazeerNo ratings yet
- T3 PDFDocument5 pagesT3 PDFRamyaNo ratings yet
- Fluke 79 PDFDocument12 pagesFluke 79 PDFMiguel CarvajalNo ratings yet
- Inverter With 555 12V / 230V 50Hz Square Wave Inverter With 555Document2 pagesInverter With 555 12V / 230V 50Hz Square Wave Inverter With 555Usep LoadNo ratings yet
- UntitledDocument119 pagesUntitledmegamaster0987654321No ratings yet
- Static Characteristics of Measuring InstrumentsDocument20 pagesStatic Characteristics of Measuring InstrumentsAnurag Arya67% (3)
- Non Inverting Operational Amplifier - Non Inverting Op Amp - Electrical4U PDFDocument8 pagesNon Inverting Operational Amplifier - Non Inverting Op Amp - Electrical4U PDFashik ahmedNo ratings yet
- NVF2 ManualDocument53 pagesNVF2 ManualGonzalo San Martin Leon83% (23)
- Intensified CCD CamerasDocument7 pagesIntensified CCD CamerasAbolfazl Jalal AbadiNo ratings yet
- Machine SolutionDocument337 pagesMachine SolutionSumon SarkerNo ratings yet
- Satellite Up-And Downconverter: Visit Us atDocument8 pagesSatellite Up-And Downconverter: Visit Us atAsif SharifNo ratings yet
- Catálogo KLIP XTREME y FORZA Enero 2014Document126 pagesCatálogo KLIP XTREME y FORZA Enero 2014Alfonso Alfaro CortezNo ratings yet
- Keen 600: The Power To ControlDocument2 pagesKeen 600: The Power To ControlSky o skyNo ratings yet
- 04 Handout 1Document4 pages04 Handout 1Janah Rose MedinaNo ratings yet
- New Sumit Luminous ProjectDocument90 pagesNew Sumit Luminous Projectranaindia2011No ratings yet
- Laptop Fault BookDocument38 pagesLaptop Fault Bookredsky991100% (1)
- Introduction To PIC Programming: Baseline Architecture and Assembly LanguageDocument16 pagesIntroduction To PIC Programming: Baseline Architecture and Assembly Languagemorcov19No ratings yet
- Fiber WDM DWDMDocument39 pagesFiber WDM DWDMCat SmithNo ratings yet
- Rocktron Utopia G100 - Owner's GuideDocument72 pagesRocktron Utopia G100 - Owner's GuideIvan JonesNo ratings yet
- Transister Series and Shunt Voltage RegulatorsDocument4 pagesTransister Series and Shunt Voltage RegulatorsMatthew Flores0% (1)
- Building The Geotech Baracuda (Rev-A)Document19 pagesBuilding The Geotech Baracuda (Rev-A)ford50% (2)
- Pok Shelling - 2021 - 11082021Document139 pagesPok Shelling - 2021 - 11082021Jose Manuel Cortez MayorgaNo ratings yet
- Tablets-Planos Estandard CPU-A20 PDFDocument20 pagesTablets-Planos Estandard CPU-A20 PDFsanlugoNo ratings yet