You might also like
- The Effects of Supercharging On The Performance of C.I Engine Using Blends of Pre-Heated Cotton Seed Oil and Diesel As Alternate FuelDocument4 pagesThe Effects of Supercharging On The Performance of C.I Engine Using Blends of Pre-Heated Cotton Seed Oil and Diesel As Alternate FuelPradeep Kumar MehtaNo ratings yet
- The Effects of Supercharging On The Performance and Exhaust Gas Emissions of A Dual-Fuel Engine Fueled With Producer Gas-Diesel and Palm Oil BlendsDocument8 pagesThe Effects of Supercharging On The Performance and Exhaust Gas Emissions of A Dual-Fuel Engine Fueled With Producer Gas-Diesel and Palm Oil BlendsPradeep Kumar MehtaNo ratings yet
- The Effects of Supercharging On The Performance and Exhaust Gas Emissions of A Dual-Fuel Engine Fueled With Producer Gas-Diesel and Palm Oil BlendsDocument8 pagesThe Effects of Supercharging On The Performance and Exhaust Gas Emissions of A Dual-Fuel Engine Fueled With Producer Gas-Diesel and Palm Oil BlendsPradeep Kumar MehtaNo ratings yet
- Residual Signal Techniques Used For Gear Fault DetectionDocument7 pagesResidual Signal Techniques Used For Gear Fault DetectionPradeep Kumar MehtaNo ratings yet
- Create Object For Recording - MATLAB AudiorecorderDocument2 pagesCreate Object For Recording - MATLAB AudiorecorderPradeep Kumar MehtaNo ratings yet
- Final Engineering Graphics Xii PDF For WebDocument180 pagesFinal Engineering Graphics Xii PDF For WebRicha Sahni100% (1)
- Lecture 22-23-24 Time Domain Analysis of 2nd Order SystemsDocument73 pagesLecture 22-23-24 Time Domain Analysis of 2nd Order SystemsPradeep Kumar Mehta100% (1)
- Universal Vibration (A)Document34 pagesUniversal Vibration (A)shajiNo ratings yet
- MMM Lab Manual 10mel47bDocument108 pagesMMM Lab Manual 10mel47bsimalaraviNo ratings yet
- TM16 Experimental Vibration Using The Universal Vibration ApparatusDocument1 pageTM16 Experimental Vibration Using The Universal Vibration ApparatusPradeep Kumar MehtaNo ratings yet
- Gear Dof Fig.Document10 pagesGear Dof Fig.Pradeep Kumar MehtaNo ratings yet
- CricketDocument3 pagesCricketPradeep Kumar MehtaNo ratings yet
- 2009-Vibration-Based Fault Diagnosis of Spur Bevel Gear Box Using Fuzzy Technique-N. SaravananDocument17 pages2009-Vibration-Based Fault Diagnosis of Spur Bevel Gear Box Using Fuzzy Technique-N. SaravananPradeep Kumar MehtaNo ratings yet
- 2015 Dynamic Modelling of A One Stage Spur Gear System and Vibration Based Tooth Crack Detection Analysis MohammedDocument13 pages2015 Dynamic Modelling of A One Stage Spur Gear System and Vibration Based Tooth Crack Detection Analysis MohammedPradeep Kumar MehtaNo ratings yet
- Download MATLAB R2015aDocument6 pagesDownload MATLAB R2015aPradeep Kumar MehtaNo ratings yet
- MPPSC General Studies Question PapersDocument39 pagesMPPSC General Studies Question PapersPradeep Kumar MehtaNo ratings yet
- MatlabDocument93 pagesMatlabPradeep Kumar MehtaNo ratings yet
- 2014 Effect of Backup Ratio and Cutter Tip Radius On Uniform Bending Strength Design of Spur Gears SekarDocument10 pages2014 Effect of Backup Ratio and Cutter Tip Radius On Uniform Bending Strength Design of Spur Gears SekarPradeep Kumar MehtaNo ratings yet
- General SocioDocument22 pagesGeneral SocioPradeep Kumar MehtaNo ratings yet
- 2010-A Novel Method For The Optimal Band Selection For Vibration Signal Demodulation and Comparison With The Kurtogram-Tomasz BarszczDocument21 pages2010-A Novel Method For The Optimal Band Selection For Vibration Signal Demodulation and Comparison With The Kurtogram-Tomasz BarszczPradeep Kumar MehtaNo ratings yet
- 10 1 1 469 5945Document21 pages10 1 1 469 5945Pradeep Kumar MehtaNo ratings yet
- 2010-Automatic Faults Diagnosis by Application of Neural Network System and Condition-Based Monitoring Using Vibration Signals-Adyles Arato JuniorDocument11 pages2010-Automatic Faults Diagnosis by Application of Neural Network System and Condition-Based Monitoring Using Vibration Signals-Adyles Arato JuniorPradeep Kumar MehtaNo ratings yet
- Below Is The Sectional Cutoff For IBPS PO 2014Document3 pagesBelow Is The Sectional Cutoff For IBPS PO 2014Pradeep Kumar MehtaNo ratings yet
- MP Forest PaperDocument21 pagesMP Forest PaperPradeep Kumar MehtaNo ratings yet
- 100 Hindi Gkq1Document3 pages100 Hindi Gkq1javed alamNo ratings yet
- Generate Electricity with HydropowerDocument22 pagesGenerate Electricity with HydropowerPradeep Kumar MehtaNo ratings yet
- Rate of Interest On Single Domestic Term DepositsDocument2 pagesRate of Interest On Single Domestic Term DepositsPradeep Kumar MehtaNo ratings yet
- On The Capacity of A Cellular CDMA System.: - Anshul PopatDocument23 pagesOn The Capacity of A Cellular CDMA System.: - Anshul PopatPradeep Kumar MehtaNo ratings yet
- Experience CertificatesDocument3 pagesExperience CertificatesPradeep Kumar MehtaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Centrifugal FanDocument5 pagesCentrifugal FanMichael Adrian100% (1)
- SPHINX'18: Malaviya National Institute of Technology JaipurDocument7 pagesSPHINX'18: Malaviya National Institute of Technology JaipurTushar Mani AgarwalNo ratings yet
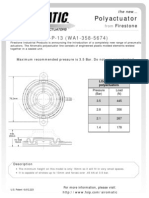
- Wa1 358 5674Document30 pagesWa1 358 5674MROstop.comNo ratings yet
- Chapter 08 Discrete State Process ControlDocument32 pagesChapter 08 Discrete State Process ControlJosé Blanco MendezNo ratings yet
- Mule ESB 3 User GuideDocument804 pagesMule ESB 3 User GuideTruong Tien DungNo ratings yet
- OPM Batch ProcessDocument494 pagesOPM Batch ProcessAmcy .SNo ratings yet
- Total Quality Management Six SigmaDocument304 pagesTotal Quality Management Six Sigmajuancgr77No ratings yet
- 2018 t3 Mn405 Assignment 1 Mel Syd v1.3Document7 pages2018 t3 Mn405 Assignment 1 Mel Syd v1.3Sarah EvanNo ratings yet
- As NZS 1865 1997 Aluminium and Aluminium Alloys Drawn Wire Rod Bar and StripDocument7 pagesAs NZS 1865 1997 Aluminium and Aluminium Alloys Drawn Wire Rod Bar and StripYasser Hammad MohamedNo ratings yet
- Project On Powder Dispensing System of Sand 3d PrintingDocument101 pagesProject On Powder Dispensing System of Sand 3d PrintingSameer MandaogadeNo ratings yet
- Distance Rate Time Word ProblemsDocument4 pagesDistance Rate Time Word Problemsapi-286443551No ratings yet
- Vocational Training ProgramDocument6 pagesVocational Training ProgramolabodeogunNo ratings yet
- Fishinger Road Transportation PlanDocument89 pagesFishinger Road Transportation Planapi-267404258No ratings yet
- CASTI - Getting Started - API 580 Risk Based Inspection CertificationDocument1 pageCASTI - Getting Started - API 580 Risk Based Inspection CertificationAgustin A.No ratings yet
- Beam Analysis BS5950Document229 pagesBeam Analysis BS5950cataiceNo ratings yet
- Hub and Spoke System PresentationDocument13 pagesHub and Spoke System PresentationShreyasNo ratings yet
- Key User and User ConceptDocument7 pagesKey User and User ConceptHacene LamraouiNo ratings yet
- Evaluation of DFXDocument5 pagesEvaluation of DFXRajeshLSNo ratings yet
- Dominar 400Document40 pagesDominar 400Alfredo FloresNo ratings yet
- Machine Vibration TutorialDocument12 pagesMachine Vibration TutorialabhishekNo ratings yet
- Kitting Project Streamlines Tractor Component AssemblyDocument44 pagesKitting Project Streamlines Tractor Component AssemblyRohit NagarNo ratings yet
- Business Plan Summary for MGVCL FY 2011-16Document160 pagesBusiness Plan Summary for MGVCL FY 2011-16havejsnjNo ratings yet
- Rounding Into Shape: SPECIAL REPORT: Global Automation and Manufacturing Summit PreviewDocument100 pagesRounding Into Shape: SPECIAL REPORT: Global Automation and Manufacturing Summit PreviewHứa Thông TriệuNo ratings yet
- Raees Ahmad: Total Experience: 5+ YearsDocument2 pagesRaees Ahmad: Total Experience: 5+ YearsSamreenKhanNo ratings yet
- Atlas Copco XAS 375 JD6Document2 pagesAtlas Copco XAS 375 JD6EngTamerNo ratings yet
- Venkata Maheedhar K V Voice:9441797872Document6 pagesVenkata Maheedhar K V Voice:9441797872anon-739858No ratings yet
- Conveyance Security-Aeo Check List PDFDocument3 pagesConveyance Security-Aeo Check List PDFRajula Gurva ReddyNo ratings yet
- Rolls-Royce Merlin EngineDocument6 pagesRolls-Royce Merlin Enginekty2924No ratings yet
- CMI Extractive Metallurgy ServicesDocument46 pagesCMI Extractive Metallurgy ServicesAbdullah SalemNo ratings yet
- Master Plan Review: North Bethesda - Garrett ParkDocument14 pagesMaster Plan Review: North Bethesda - Garrett ParkM-NCPPCNo ratings yet