You might also like
- High Precision Laser Interferometer Feedback SystemsDocument24 pagesHigh Precision Laser Interferometer Feedback SystemsSandeep RaiNo ratings yet
- Laser InterferometerDocument33 pagesLaser InterferometerShree Ram PandeyNo ratings yet
- FourierOptics SLM LabDocument14 pagesFourierOptics SLM LabSuhail Mohammad ZargarNo ratings yet
- Ellipsometry: Alborg NiversityDocument138 pagesEllipsometry: Alborg Niversityanju guptaNo ratings yet
- Moire and Fringe Projection Techniques PDFDocument34 pagesMoire and Fringe Projection Techniques PDFMay VargasNo ratings yet
- Solid State Physics Lab PES 415 / PHYS 515 Spring 2005Document4 pagesSolid State Physics Lab PES 415 / PHYS 515 Spring 2005Der Untiringe KäferNo ratings yet
- Fourier Optics and Hamiltonian Aberration TheoryDocument43 pagesFourier Optics and Hamiltonian Aberration TheoryShiva MohammadzadehNo ratings yet
- Volume Holographic Gratings (VHG) in ZemaxDocument39 pagesVolume Holographic Gratings (VHG) in ZemaxLeandro Bertoluzzi100% (2)
- S-108 2110 Intoduction To Matrix Optics PDFDocument20 pagesS-108 2110 Intoduction To Matrix Optics PDFVibhor MittalNo ratings yet
- Improving Dichromated Gelatin SensitivityDocument5 pagesImproving Dichromated Gelatin SensitivityArash RohaniNo ratings yet
- Investigations On The Theory of The Photographic Process - Sheppard and MeesDocument366 pagesInvestigations On The Theory of The Photographic Process - Sheppard and MeesJorgeCamachoNo ratings yet
- Antenna BasicsDocument27 pagesAntenna BasicsDulce MarconiNo ratings yet
- Hans Bjelkhagen New Recording Materials For HolographyDocument12 pagesHans Bjelkhagen New Recording Materials For HolographyAABDAHMEDNo ratings yet
- Beam Splitter Tutorial ZemaxDocument12 pagesBeam Splitter Tutorial ZemaxprajneshNo ratings yet
- Beam ExpandersDocument4 pagesBeam ExpandersVaBi LeftNo ratings yet
- Zemax Tutorial V03Document15 pagesZemax Tutorial V03vlavanyakumarNo ratings yet
- Build Your Own Beam ExpanderDocument12 pagesBuild Your Own Beam ExpanderRio Ananda PutraNo ratings yet
- Upload Mach Zehnder Interferometer and Its Temperature Based ApplicationsDocument31 pagesUpload Mach Zehnder Interferometer and Its Temperature Based ApplicationsMridul ChakrabortyNo ratings yet
- FBG Polariser PDFDocument4 pagesFBG Polariser PDFDaniel AdebayoNo ratings yet
- Schiefspiegler ToolkitDocument5 pagesSchiefspiegler ToolkiteolocosNo ratings yet
- Mohamad A Mehdi Conformal Mappings and ApplicationsDocument53 pagesMohamad A Mehdi Conformal Mappings and Applicationsapi-363560361No ratings yet
- Optics Book v2Document200 pagesOptics Book v2noobNo ratings yet
- F Number PDFDocument6 pagesF Number PDFnandan akNo ratings yet
- Vdocuments - MX Optical Design With Zemax For PHD Basics Iapuni Jenade DesignforphdDocument45 pagesVdocuments - MX Optical Design With Zemax For PHD Basics Iapuni Jenade DesignforphdLucia SuarezNo ratings yet
- Zernike polynomials describe eye aberrationsDocument26 pagesZernike polynomials describe eye aberrationsgastromonoNo ratings yet
- Advanced Holography - Metrology and ImagingDocument384 pagesAdvanced Holography - Metrology and Imagingzaryab khanNo ratings yet
- Bravais Lattices and Miller IndicesDocument17 pagesBravais Lattices and Miller IndicesSabir AliNo ratings yet
- Birefringence of MicaDocument5 pagesBirefringence of MicaYashwantha CharyNo ratings yet
- EMISSION AND ABSORPTION SPECTRA REVEAL ATOMIC STRUCTUREDocument2 pagesEMISSION AND ABSORPTION SPECTRA REVEAL ATOMIC STRUCTUREHossainNo ratings yet
- Laser and Optical FiberDocument32 pagesLaser and Optical FiberKiran ThunuguntlaNo ratings yet
- Telescopes Basic Telescope Optics PDFDocument7 pagesTelescopes Basic Telescope Optics PDFJosiel Carlos Souza GomesNo ratings yet
- Ieee 16 - 2004Document47 pagesIeee 16 - 2004Talha AltafNo ratings yet
- Fabry Perot PDFDocument2 pagesFabry Perot PDFAnitaNo ratings yet
- Electron Scattering and Nuclear Structure PDFDocument44 pagesElectron Scattering and Nuclear Structure PDFFernanda RibeiroNo ratings yet
- Radio Astronomy TheoryDocument15 pagesRadio Astronomy TheorybinkyfishNo ratings yet
- Diffraction and Spectroscopy: Harsh MenonDocument9 pagesDiffraction and Spectroscopy: Harsh Menonmenon.harshNo ratings yet
- 12th WorkshhetsDocument24 pages12th WorkshhetsAtul VermaNo ratings yet
- Formal Report ZeemanDocument10 pagesFormal Report ZeemanW-d DomNo ratings yet
- IAT14 - Imaging and Aberration Theory Lecture 1 Paraxial OpticsDocument40 pagesIAT14 - Imaging and Aberration Theory Lecture 1 Paraxial OpticsShiva MohammadzadehNo ratings yet
- Laser and Gaussian Beam Propagation and TransformationDocument19 pagesLaser and Gaussian Beam Propagation and TransformationThiago Coelho100% (1)
- Feryforgues Are Fluorescence Quantum Yields So Tricky To Measure PDFDocument5 pagesFeryforgues Are Fluorescence Quantum Yields So Tricky To Measure PDFNadia WilsonNo ratings yet
- Diffusion PlasmaDocument34 pagesDiffusion PlasmaPriyanka Lochab100% (1)
- DLP System OpticsDocument26 pagesDLP System OpticsAnonymous kg7YBMFHNo ratings yet
- 07 Plane Electromagnetic WavesDocument120 pages07 Plane Electromagnetic WavesVivek KumarNo ratings yet
- Unit 4 - Microwave Engineering - WWW - Rgpvnotes.inDocument16 pagesUnit 4 - Microwave Engineering - WWW - Rgpvnotes.inPranav ChaturvediNo ratings yet
- Fabry Perot Filter Analysis and Simulation Using MATLAB-Tamir SulimanDocument6 pagesFabry Perot Filter Analysis and Simulation Using MATLAB-Tamir SulimanAllamiro Tamir Bushra Suliman50% (2)
- T8 - Anisa Meysi Wardi - Quantum Theory of Hydrogen Atom - Eng PDFDocument13 pagesT8 - Anisa Meysi Wardi - Quantum Theory of Hydrogen Atom - Eng PDFyuni fitriaNo ratings yet
- Lens CoatingDocument43 pagesLens CoatingjorgeNo ratings yet
- Miller indices explainedDocument5 pagesMiller indices explainedKamenriderNo ratings yet
- Light Pipes For MatlabDocument113 pagesLight Pipes For MatlabHaripriya MuralikrishnanNo ratings yet
- Laser Beam Expanders Basics and Applications: Vision System Vision SystemDocument6 pagesLaser Beam Expanders Basics and Applications: Vision System Vision SystemAtul SharmaNo ratings yet
- Lorentz TransformationDocument27 pagesLorentz TransformationBrenda Michelle ReyesNo ratings yet
- Sampled Imaging Systems: Analysis and Evaluation ofDocument20 pagesSampled Imaging Systems: Analysis and Evaluation ofSurajit AcharyaNo ratings yet
- Polarization LectureDocument46 pagesPolarization LectureSyed IrfanNo ratings yet
- An Introduction to Electrooptic Devices: Selected Reprints and Introductory Text ByFrom EverandAn Introduction to Electrooptic Devices: Selected Reprints and Introductory Text ByNo ratings yet
- Introduction to Optical Waveguide Analysis: Solving Maxwell's Equation and the Schrödinger EquationFrom EverandIntroduction to Optical Waveguide Analysis: Solving Maxwell's Equation and the Schrödinger EquationNo ratings yet
- CW LPD Diode LasersDocument151 pagesCW LPD Diode Laserssal.paradise.1No ratings yet
- Superconductivity in 2D GasDocument5 pagesSuperconductivity in 2D Gassal.paradise.1No ratings yet
- MIT SolidState1 PDFDocument124 pagesMIT SolidState1 PDFsal.paradise.1No ratings yet
- Two Dimensional Electron Gas, Quantum Wells & Semiconductor SuperlatticesDocument41 pagesTwo Dimensional Electron Gas, Quantum Wells & Semiconductor SuperlatticesChang Jae LeeNo ratings yet
- The Crystal Structure of Diamond - DawsonDocument26 pagesThe Crystal Structure of Diamond - Dawsonsal.paradise.1No ratings yet
- Digital Design by Frank VahidDocument277 pagesDigital Design by Frank VahidCam Herringshaw57% (7)
- The Crystal Structure of Diamond - DawsonDocument26 pagesThe Crystal Structure of Diamond - Dawsonsal.paradise.1No ratings yet
- Two Dimensional Electron Gas, Quantum Wells & Semiconductor SuperlatticesDocument41 pagesTwo Dimensional Electron Gas, Quantum Wells & Semiconductor SuperlatticesChang Jae LeeNo ratings yet
- Fo BookDocument47 pagesFo BookDipen BarotNo ratings yet
- CMOS Mixed Signal Circuit Design by Jacob BakerDocument180 pagesCMOS Mixed Signal Circuit Design by Jacob BakerSharath Sogi0% (1)
- Ashcroft, Neil W, Mermin, David N - Solid State PhysicsDocument848 pagesAshcroft, Neil W, Mermin, David N - Solid State PhysicsEric Standard88% (8)
- Digital Design by Frank VahidDocument277 pagesDigital Design by Frank VahidCam Herringshaw57% (7)
- Dissertation PratikDocument94 pagesDissertation Pratiksal.paradise.1No ratings yet
- EE466 VLSI Design Lecture 02 Non Ideal Effects in MOSFETsDocument18 pagesEE466 VLSI Design Lecture 02 Non Ideal Effects in MOSFETssal.paradise.1No ratings yet
- Electronics ResearchDocument4 pagesElectronics Researchsal.paradise.1No ratings yet
- Digital Communication Book, Proakis and Salehi, Engineering EbookDocument937 pagesDigital Communication Book, Proakis and Salehi, Engineering Ebooksal.paradise.1No ratings yet
- 501 Critical Reading QuestionsDocument283 pages501 Critical Reading Questionsapi-3813392100% (9)
- Scan0066 PDFDocument1 pageScan0066 PDFJayson Jonson AraojoNo ratings yet
- Scheme - I Sample Question PaperDocument4 pagesScheme - I Sample Question Paperjijo123408No ratings yet
- MW Lec-Scattering matrixDocument16 pagesMW Lec-Scattering matrixHitesh MohantyNo ratings yet
- Workbook 3.2 Ray, Wave, and Particle Models of Light FILLABLEDocument11 pagesWorkbook 3.2 Ray, Wave, and Particle Models of Light FILLABLEkun jiangNo ratings yet
- The Nature of Light and Properties of LightDocument25 pagesThe Nature of Light and Properties of LightJane ManalusNo ratings yet
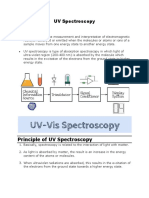
- UV SpectrosDocument4 pagesUV SpectrosCarlton GrantNo ratings yet
- Db844h90e XyDocument2 pagesDb844h90e XyFrancisco NascimentoNo ratings yet
- Physci Module 12Document25 pagesPhysci Module 12pearlNo ratings yet
- PolarizationDocument15 pagesPolarizationHong Zher TanNo ratings yet
- TLW Unit3Document2 pagesTLW Unit3Darwin RNo ratings yet
- Electricity and MagnetismDocument43 pagesElectricity and MagnetismCharles Alfred Dela CruzNo ratings yet
- PHOTOGRAPHY: A GUIDE TO FORENSIC AND POLICE PHOTOGRAPHYDocument92 pagesPHOTOGRAPHY: A GUIDE TO FORENSIC AND POLICE PHOTOGRAPHYKaren Paño100% (3)
- Measure Coil Resistance and Impedance of TransformerDocument8 pagesMeasure Coil Resistance and Impedance of TransformerFarizal JaafarNo ratings yet
- Amidon Core CatalogDocument34 pagesAmidon Core Catalogrftek50% (2)
- Halo Lighting Architectural Lighting Catalog 1995Document104 pagesHalo Lighting Architectural Lighting Catalog 1995Alan MastersNo ratings yet
- IM in ELEN-30083-ELECTRICAL MACHINES-PALUSTRE #RPPDocument62 pagesIM in ELEN-30083-ELECTRICAL MACHINES-PALUSTRE #RPPAHSTERINo ratings yet
- Exploring Pulsars An Introduction by ARNABDocument11 pagesExploring Pulsars An Introduction by ARNABARNAB HALDERNo ratings yet
- Fiber-Optical Analog of The Event Horizon: ReportsDocument5 pagesFiber-Optical Analog of The Event Horizon: ReportsjdrinconeNo ratings yet
- Transmission of Heat QuestionsDocument7 pagesTransmission of Heat Questionsnellai kumarNo ratings yet
- Ele 099 Ac Motor Lec 10 02 15 24-1Document23 pagesEle 099 Ac Motor Lec 10 02 15 24-1Ryan SimorioNo ratings yet
- GG711 Microscopy 02 WaveOpticsDocument27 pagesGG711 Microscopy 02 WaveOpticsrahul jainNo ratings yet
- Microwave shielding thickness for perfect transmissionDocument2 pagesMicrowave shielding thickness for perfect transmissionMridusmita BoruahNo ratings yet
- List of Light Fittings GhanaDocument1 pageList of Light Fittings GhanaJoseph EzekielNo ratings yet
- Lesson Plan Phy534 Sept 2019-Dr ZuriantiDocument2 pagesLesson Plan Phy534 Sept 2019-Dr ZuriantiAnonymous HE1fm4No ratings yet
- PHYSICS FORM 5 – WAVES TEST REVIEWDocument2 pagesPHYSICS FORM 5 – WAVES TEST REVIEWShiyamala SubramaniamNo ratings yet
- All About Aspheric LensesDocument4 pagesAll About Aspheric LensesAnonymous 9oYiZMNo ratings yet
- Inductor Design Tips With Case Studies: VasminDocument20 pagesInductor Design Tips With Case Studies: Vasminankur panwarNo ratings yet
- Tuv 15W SLVDocument2 pagesTuv 15W SLVWilliam N. CalfaNo ratings yet
- 02 Emi PDFDocument31 pages02 Emi PDFVedantNo ratings yet
- Problems On Ray Optics and Optical Instruments For NEETDocument19 pagesProblems On Ray Optics and Optical Instruments For NEETRohit GuptaNo ratings yet